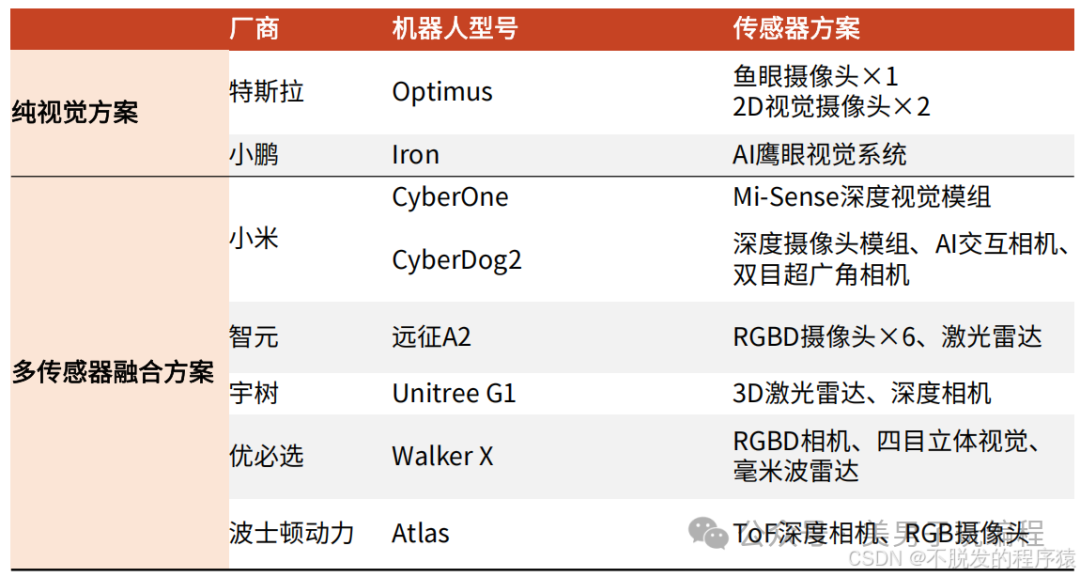
当前人形机器人厂商采用的传感器方案大致可以分为两类:
纯视觉方案(例如特斯拉、小鹏);
多传感器融合方案(例如小米、智元、宇树、优必选等)。
其中,大多数多传感器融合方案主要结合深度相机与摄像头进行感知。
纯视觉方案:这种方案依赖于摄像头和视觉算法进行环境感知,主要应用于特斯拉和小鹏等厂商的机器人。尽管视觉方案的普适性较强,但在复杂环境下(如低光照或极端天气)可能表现不佳。视觉方案优势在于其相对较低的成本和逐步成熟的计算机视觉算法,但局限性也很明显,特别是在3D空间感知和深度感知方面。
多传感器融合方案:该方案通过结合多个传感器(如深度相机、摄像头、IMU、激光雷达等)来增强机器人感知能力,应用于小米、智元、宇树、优必选等厂商。这种方案通过信息融合,提高了机器人的感知精度和鲁棒性,尤其在复杂环境中的表现更为优越。具体来说,深度相机和摄像头的组合可以提供较高的精度和实时性,尤其在目标物体的定位和障碍物检测上具有优势。
1
机器人感知与路径规划的需求
我们判断,人形机器人在感知周围环境和实现路径规划时,需要综合考虑以下几个因素:
及时感知与高精度定位:与汽车不同,人形机器人对于前方远距离障碍物的精准度要求相对较低,更多关注近距离环境识别和目标物体定位的精度。这是因为人形机器人一般在室内或近距离环境中活动,障碍物距离相对较短,因此更需要高精度的近距离感知;人形机器人传感器的空间相对有限,无法像汽车那样使用大面积的激光雷达阵列,因此对体积、重量和功耗的要求更为苛刻;人形机器人需具备低功耗、高效能的感知方案,以便在不断移动和执行任务时持续工作。
功能迭代与降本压力:机器人领域的技术迭代非常快速,因此传感器方案不仅要满足当前需求,还要具备较强的可升级性,能够随着技术的进步不断提升感知精度、拓宽应用场景,同时保持成本控制。在这方面,纯视觉方案的端到端普适性较强,尤其是在感知算法和硬件优化的持续发展下,视觉方案有望在未来得到更加广泛的应用,并可能从自动驾驶领域迁移到人形机器人领域。
2
传感器技术选择与优化
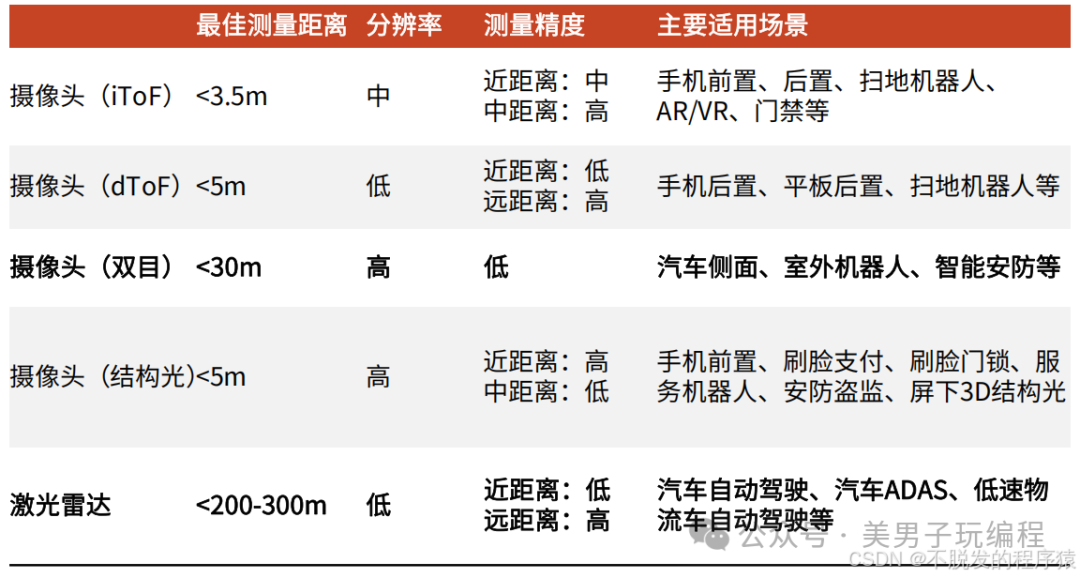
激光雷达的精度高、探测距离远,适合于汽车中的长距离障碍物检测,但对于人形机器人来说,激光雷达的应用受到体积、功耗和成本的限制。尽管激光雷达在200-300米的距离上有明显优势,但在人形机器人较为狭小的空间和复杂的室内环境中,其作用可能受到局限。
深度相机与摄像头的组合则更加适合人形机器人。深度相机可以提供实时的三维空间信息,而摄像头则负责图像捕捉和目标识别。通过深度相机与视觉传感器的结合,可以实现对物体位置的精确识别和定位,尤其在距离较近的情况下,表现优异。结合SLAM(同步定位与地图构建)技术,能够有效地完成室内环境建图与路径规划。
IMU(惯性测量单元)和传感器融合技术在多传感器融合方案中也扮演重要角色。IMU可以提供实时的运动姿态数据,增强机器人对动态环境的应对能力。