点击蓝字 关注我们
SUBSCRIBE to US
Gang Wang, Kaixin Liu et al.
海底观测在保护海洋系统方面发挥着重要作用,它能密切关注不同深度海底的物种和栖息地。这主要是由水下机器人完成的,这些机器人利用光学成像来收集可输入环境模型的高质量数据,并补充在大规模海洋观测中通过声呐获取的数据。
多年来人们试用了不同的水下机器人,但许多机器人在进行近海底观测时遇到困难,因为它们会破坏珊瑚、搅乱沉积物,从而干扰当地的海底环境。来自中国哈尔滨工程大学的Gang Wang及其研究团队近期开发了一种机动性好的水下航行器(https://www.nature.com/articles/s41467-024-54600-8),这种航行器更适合海底作业,因为它通过在海底上方漂浮以及配备特殊设计的螺旋桨系统来进行操控,不会干扰当地环境。这些机器人可用于在研究海底的同时更好地保护海底,并有助于加强保护海洋生物多样性以及勘探如电动汽车电池所需矿物等水下资源的工作(https://spectrum.ieee.org/dark-oxygen-deep-sea-mining)。
许多水下机器人是轮式或腿式的,但Gang Wang表示:“这些机器人在崎岖地形中面临巨大挑战,那里的障碍物和斜坡会阻碍它们发挥功能。”它们还可能破坏珊瑚礁。
漂浮式机器人不存在这个问题,但现有的这类机器人会搅乱海底的沉积物,因为它们的推进器在上升过程中会产生向下的水流。在大多数漂浮式机器人中,螺旋桨尾流产生的波浪直接冲击海底,这会导致附近的沉积物移动。这就类似于灰尘在你的数码相机或智能手机摄像头前飞舞一样,水中移动的颗粒会遮挡机器人摄像头的视线,降低其拍摄图像的质量。Gang Wang说:“解决这个问题对我们原型机功能上的成功以及提高其在工程师中的接受度至关重要。”
设计更好的水下机器人
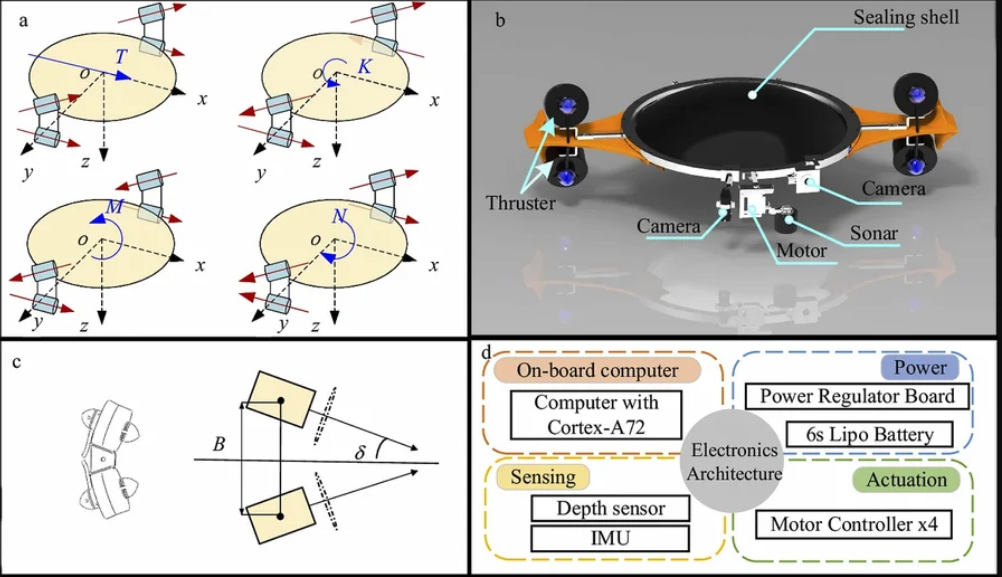
经过进一步研究,Gang Wang和团队其他成员发现,即使在低速情况下,机器人的形状也会影响局部的水阻力(即拖拽力)。Gang Wang说:“在设计过程中,我们将机器人配置为两个水阻力差异显著的平面。”这使得研究人员开发出一种扁平机身的机器人,并使推进器相对于中心轴倾斜。Gang Wang说:“我们发现机器人的形状和推进器布局对其上升速度有显著影响。”
Gang Wang, Kaixin Liu et al.
研究人员创建了一个导航系统,在这个系统中,推进器产生一种向下倾斜但仍能让机器人上升的合力,在上升过程中改变尾流分布,从而不会干扰海底的沉积物。Gang Wang说:“将机器人的机身扁平化,并使推进器相对于中心轴倾斜,对大多数工程师来说是一种简单的方法,这提高了这种设计在海底监测中的广泛应用潜力。”
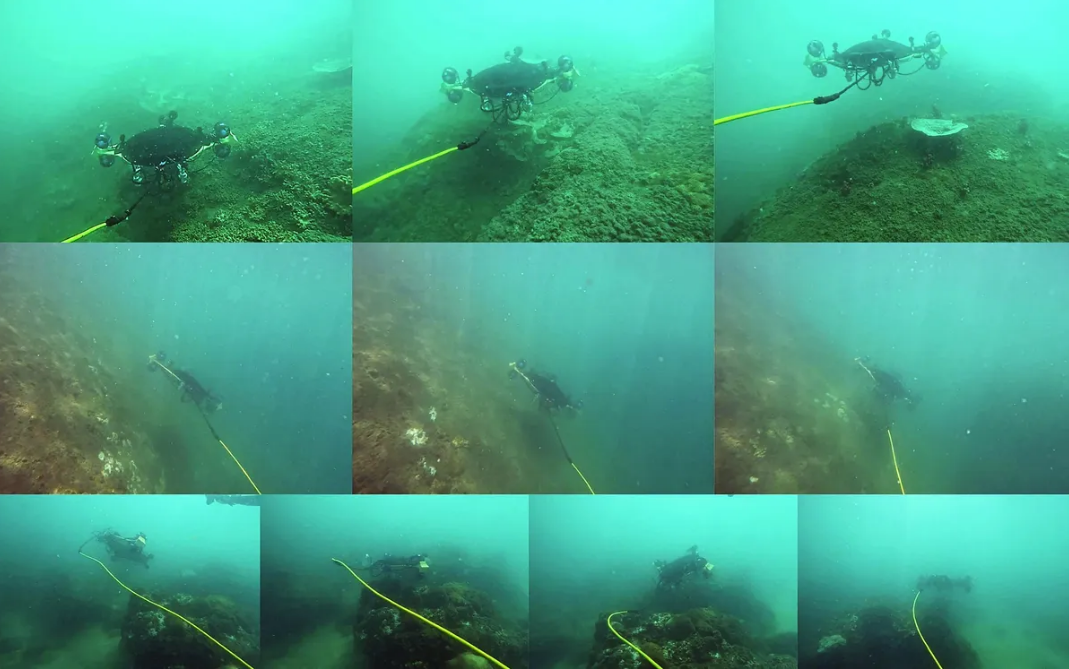
Gang Wang表示:“通过解决漂浮式机器人的导航问题,我们的目标是提高水下机器人在近海底环境中的观测能力。”该航行器在多种海洋环境中进行了测试,包括沙地、珊瑚礁和陡峭的岩石区域,以展示其在多种潜在环境中对沉积物干扰最小的能力。
除了结构设计方面的进步之外,该团队还采用了角加速度反馈控制,以使机器人尽可能靠近海底而又不实际触底(这被称为触底失效)。他们还开发了外部干扰观测算法,并设计了一种传感器布局结构,使机器人能够快速识别和抵御外部干扰,以及实时规划路径。这种方法使新的航行器能够在距离海底仅20厘米的高度行进而不会触底。
通过植入这种控制,机器人能够靠近海底,并通过减少水柱造成的光折射和散射来提高所拍摄图像的质量。Gang Wang说:“鉴于机器人靠近海底,即使是短暂的不稳定也可能导致与海底碰撞,而且我们已经证实该机器人对强烈干扰表现出出色的抵抗力。”
随着这种新型机器人在更接近海底而不干扰海床或发生碰撞方面取得成功,Gang Wang表示,他们计划使用该机器人对珊瑚礁进行近距离观测。目前的珊瑚礁监测依赖低效的人工方法,因此这些机器人可以扩大观测范围,并且能更快地完成观测。
Gang Wang补充说:“在较深水域,特别是中层透光带,缺乏有效的探测方法。我们计划提高探测过程的自主性,以替代潜水员进行图像采集,并促进珊瑚礁物种密度的自动识别和分类,从而对珊瑚礁的健康状况提供更准确、更及时的反馈。”

微信号|IEEE电气电子工程师学会
新浪微博|IEEE中国
· IEEE电气电子工程师学会 ·
往
期
推
荐
动手协作:建立机器人肌肉记忆
这个背包原型减轻了自身的重量和内部物品的晃动
脑机接口预示着未来生活质量的提高
最新研究表明AI工具能悄无声息地改变我们的观点
