


----追光逐电 光引未来----
“
近年来,随着AR,VR,虚拟试衣,自动驾驶等领域的兴起,三维重建技术得到了广泛的应用。今天分享一篇来自三维匠心的关于三维重建的综述文章。文章较长,建议收藏。 ”
 。
。
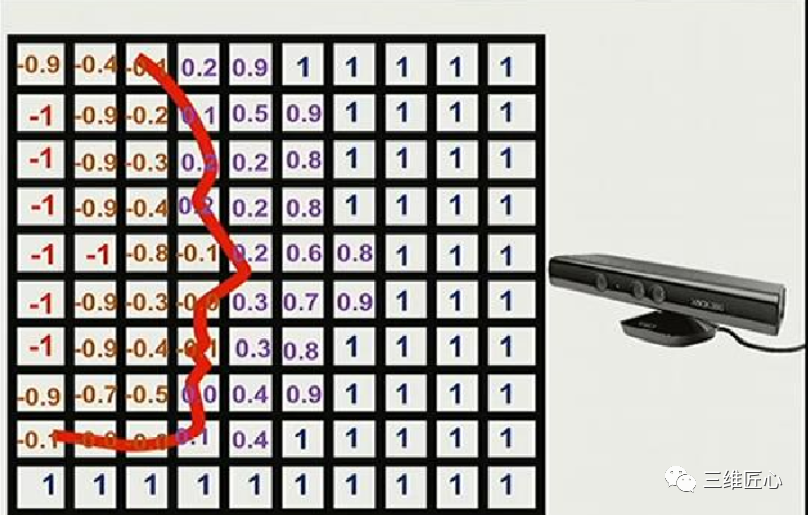

Surfel这种表示方法最早于2000年提出用于模型渲染,如下图所示,每一个Surfel可以理解成一个小面片,包含以下要素:
下面分别介绍下代表性工作。
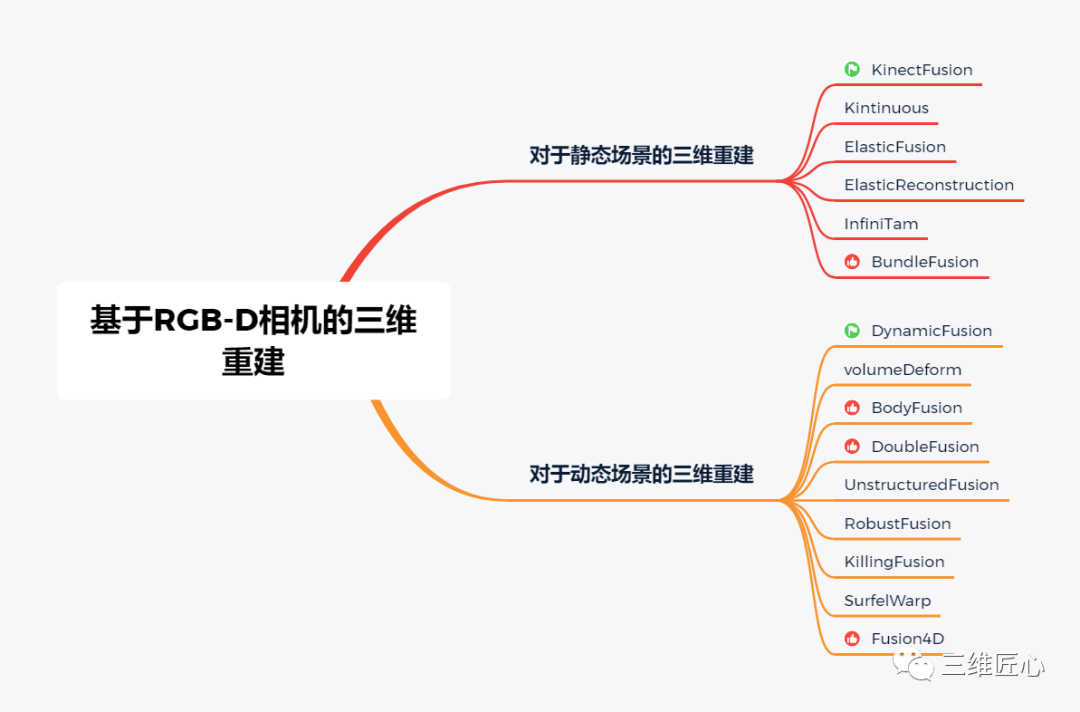
1
基于静态场景的三维重建
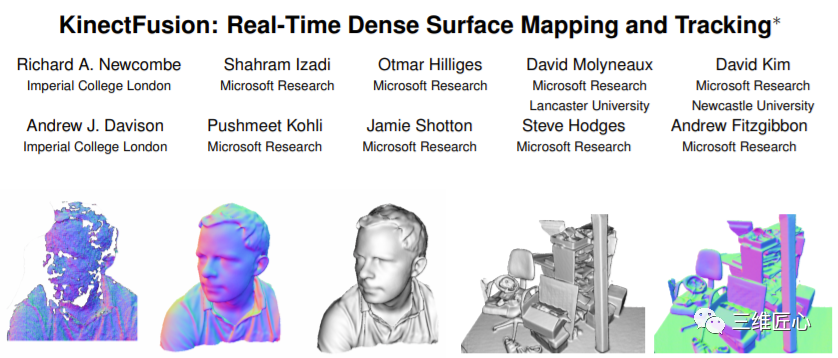
 论文链接:https://www.microsoft.com/en-us/research/wp-content/uploads/2016/02/ismar2011.pdf
论文链接:https://www.microsoft.com/en-us/research/wp-content/uploads/2016/02/ismar2011.pdf 






2
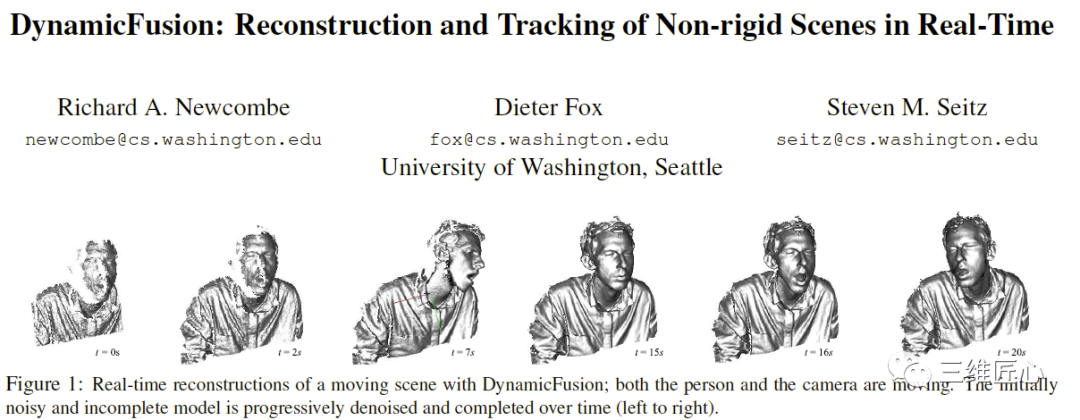
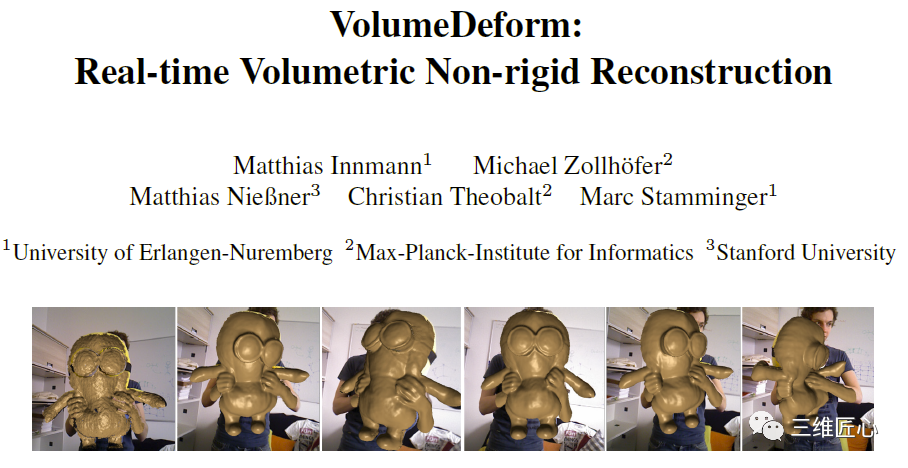
基于动态场景的三维重建











申明:感谢原创作者的辛勤付出。本号转载的文章均会在文中注明,若遇到版权问题请联系我们处理。

----与智者为伍 为创新赋能----

联系邮箱:uestcwxd@126.com
QQ:493826566


