随着“人工智能(AI)”时代的到来,机器人技术为人类提供了更便捷、更智能的服务。类皮肤传感器能够同时检测多种刺激,在前沿人机交互领域具有巨大的发展潜力。然而,要实现超越人类触觉感知的多模态触觉识别,目前仍面临重大挑战。
据麦姆斯咨询报道,针对上述难题,广西大学聂双喜教授团队开发出一种极端环境自适应的多模态摩擦电式传感器,它能够对超出人类触觉感知范围的压力和温度进行检测。该传感器基于摩擦纳米发电机(TENG)技术,利用高温下稳定的纤维素摩擦电材料,设计出能够独立输出双重信号的非对称结构,从而实现高温环境中的多重刺激响应。该多模态摩擦电式传感器为极端环境自适应机器人在人机交互、虚拟现实(VR)、太空探索等领域开辟了广阔的应用前景。相关研究成果以“Triboelectric tactile sensor for pressure and temperature sensing in high-temperature applications”为题发表在Nature Communications期刊上。
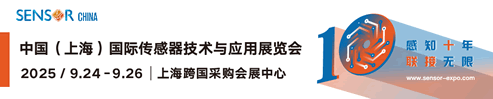
这项研究的灵感来自撒哈拉银蚁(Cataglyphis bombycina),这种昆虫能够在高温环境下保持多感官感知。受此启发,研究人员开发了一种能够在极端高温下实现自适应触觉感知的摩擦电式传感器,以突破人类的触觉极限。研究表明,当生物体受到机械和热刺激时,皮肤离子通道的开合会产生生理电信号,帮助其进行环境感知。借鉴这一生物学原理,并基于摩擦纳米发电机的接触带电现象,研究人员设计出压力-温度多模态摩擦电式传感器,用于在高温下感知压力和热刺激。
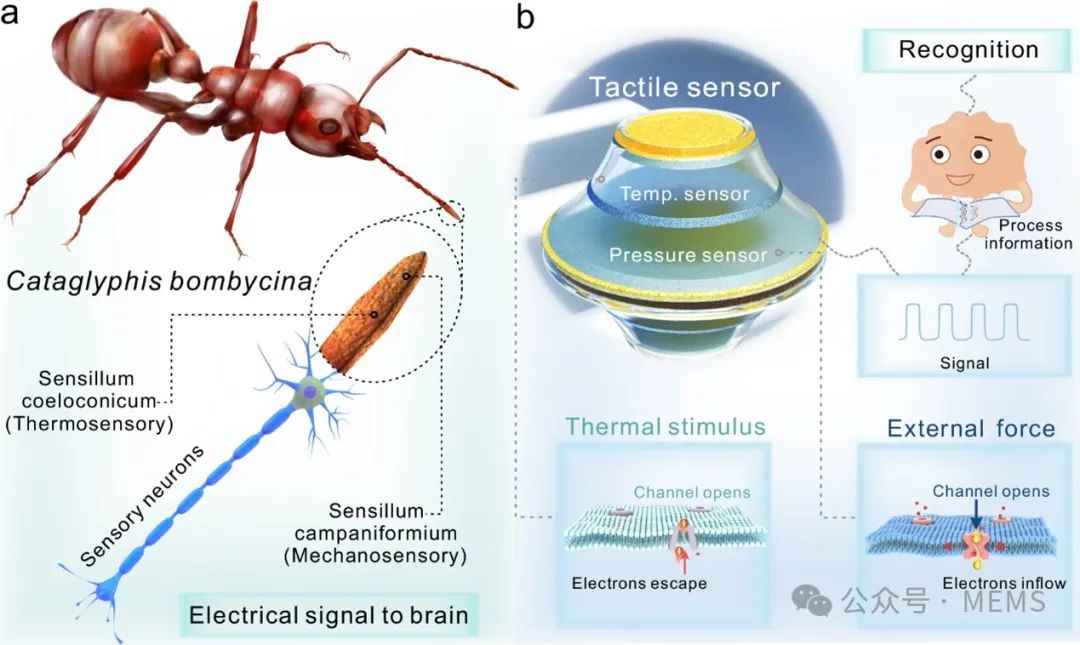
图1 仿生摩擦电式触觉传感器示意图
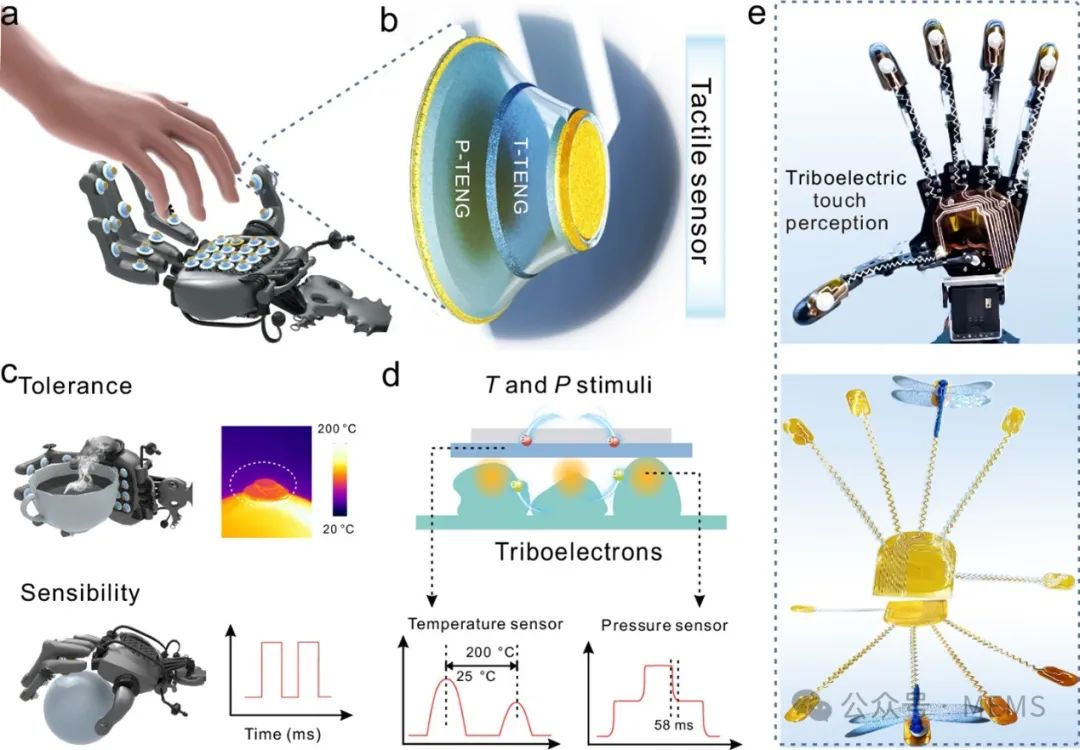
图2 超越人类触觉感知的极端环境自适应压力-温度响应摩擦电式传感器
该多模态摩擦电传感器无需外部电源即可实现实时数字响应,同时,其尺寸可切换的特性有利于可扩展集成。通过结合机器学习技术,还可以进一步准确识别高温环境下物体的形状和温度。得益于非对称结构和耐热传感材料的设计,该摩擦电传感器表现出快速的应力响应和恢复时间,分别为70 ms和58 ms。其最高工作温度可达200℃,远超人类皮肤的高温感知极限(60℃)。
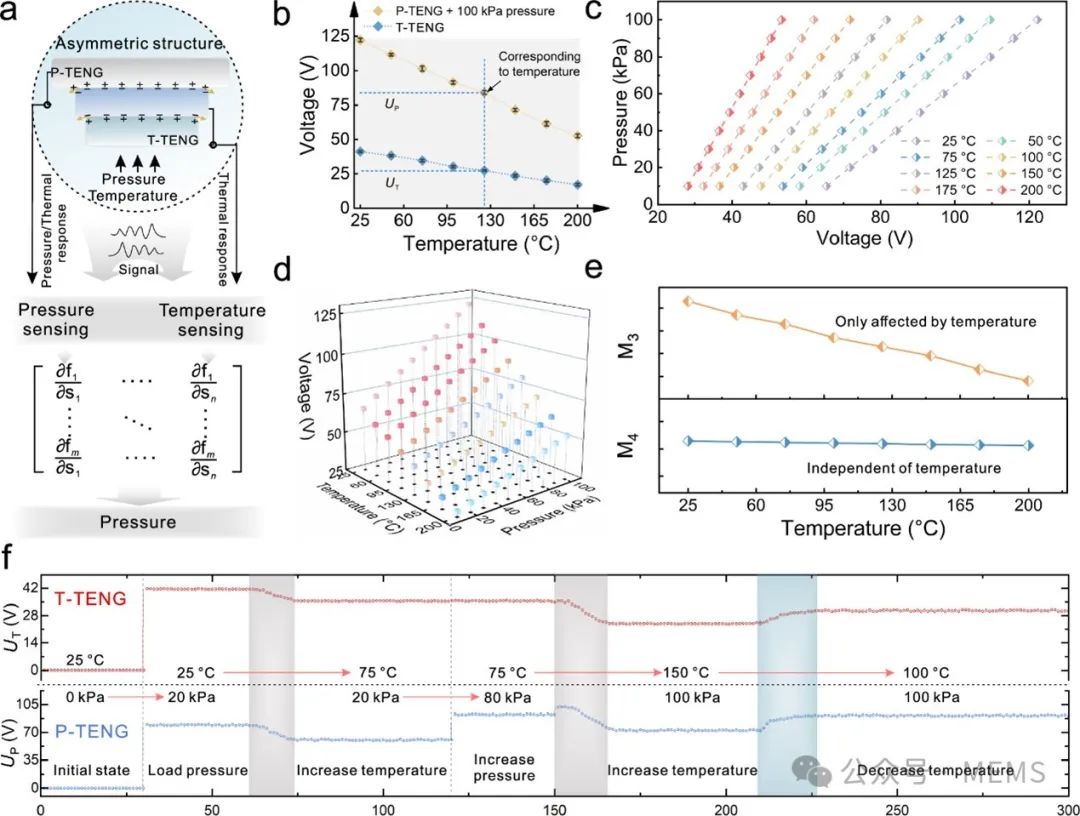
图3 在单个摩擦电式传感器中实现压力-温度解耦和双模态传感
为了更好地展示该多模态摩擦电传感器在实际场景中的压力-温度响应能力,研究人员将该传感器集成在机器人手的五个指尖中,形成一个识别未知物体的智能触觉系统,并设计了可拉伸电极,以确保手部运动的灵活性,避免电极损伤对信号的干扰。该系统可以远程控制机器人手,同步模拟各种手部动作,为用户提供空间分布的触觉反馈,为在复杂极端环境下让机器人替代人类执行潜在危险任务提供了解决方案。通过将神经网络学习与触觉感知相结合,该系统对对称和非对称物体展现出优异的识别性能,平均识别准确率为94%。
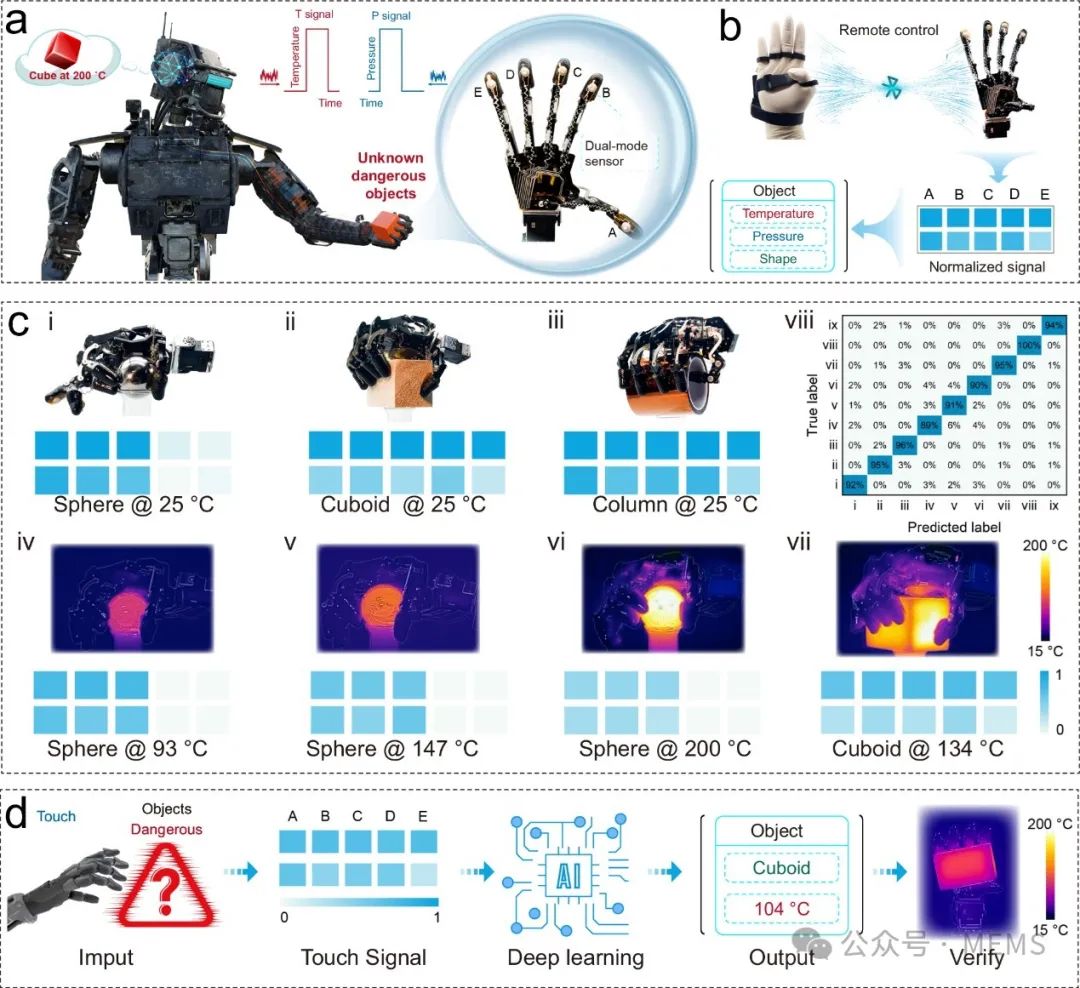
图4 高温环境下的触觉感知
综上所述,这项研究工作展示了一种能够在极端环境下对超出人类触觉感知范围的压力-温度进行响应的摩擦电式传感器,为前沿人机交互的发展提供了新的设计思路。研究人员表示,这项工作目前尚处于初步研究阶段,后续将通过多学科融合(例如隔热和阻燃材料的设计以及无线插件的扩展等),进一步实现多模态摩擦电式传感器在极端环境中的复杂应用。
论文信息:
https://doi.org/10.1038/s41467-024-55771-0