
国内的自动驾驶热潮从2016年开始,8年多时间,技术的风向和资本的潮水不断变换,一些名字已经湮灭在这段科技创新史中,一些曾以无人车为志向的企业选择先做车企供应商保证发育,也有“自动驾驶黄埔军校”上演一轮轮铁打的营盘流水的兵。
2016年,楼天城和彭军两位谷歌+百度的双料前同事,一起创办小马智行,决意把天赋和经验带到方兴未艾的自动驾驶行业,提供Robotaxi(无人出租车)服务。8年后,一批曾经的自动驾驶才俊已扭头跳入具身智能的新浪潮,小马则刚刚完成IPO。1月,我们在小马智行广州办公室采访了CTO楼天城。楼天城外号“教主”,因他青年时代在编程竞赛上的恐怖统治力而来。但在中文互联网上,在自动驾驶上更有统治力的是特斯拉、华为、小鹏、理想——尽管他们主攻的L2自动驾驶严格来讲和小马、Waymo、百度萝卜快跑从事的L4自动驾驶是两种东西。楼天城告诉我们,Robotaxi在技术方面是轻舟已过万重山,过去几年人们仍不看好,很大程度是因为接触不到无人车。上市后,小马在2025年的目标是将对外运营的Robotaxi扩充到千辆规模,开启真正的大规模商业化尝试。楼天城也告诉我们,小马这八年的故事没有太多峰回路转,唯独有一段他认为自己和他人都绕不过去的弯路。成立前三年,小马选择的AI技术路线是模仿学习,这对应今天车企在L2高阶智驾竞赛中流行的“端到端”,即让智驾系统通过看老司机的驾驶视频学开车。2019年,小马在这项技术遭遇瓶颈,每驾驶千余公里若不接管就可能发生一次剐蹭,远低于人类司机水平,更不符合“无人驾驶应比人类安全10倍”的要求。2020年,楼天城说服团队用两年时间推倒重来,走上了强化学习的道路——不再尝试教自动驾驶系统具体怎么开车,而是构建出一个尽量逼真的虚拟世界,告诉它开车要遵从的准则,让它在其中以远超现实的速度自行试错。这个被楼天城称为世界模型的工程,将小马Robotaxi的安全接管里程,从曾经的千公里提升到了数十万公里一次,并正往越来越超过人的方向去。与此同时,车企们的高阶智驾普遍在百公里等级的安全接管里程努力。楼天城认为这很合理,因为L2和L4的目标本就不同,但外界一直从L2视角审视L4太久,带来了从技术到商业上的各种误解。在前商业化阶段穿行八年,楼天城取得了内部的理解与支持,这让小马成为为数不多目标和团队都保持稳定的自动驾驶创业公司。而在最近,小马来到需要取得外部理解的阶段,楼天城希望传达他经历的、看到的、相信的。从他的经验出发,楼天城提供了一些有趣的、反常识或是有挑战性的观点:对L4自动驾驶来说,不带有开车思考过程的数据没有意义;大部分人开车没见过世面,但一辆无人车在世界模型的虚拟环境里都见过,且以合理的概率见过;自动驾驶的世界模型是一步步改进迭代而来,重要的是团队的工程能力,有一个积累的过程,短期靠堆资源、挖人没用;人们对L4的技术疑虑,部分是因为把L2的商业模型套给了L4,但实际情况是商业模型定义技术选择,而非反过来;车企想从L2做到L4,那些他们以为的积累其实是负担;Robotaxi寻找的市场应该是体验驱动而不是低价驱动;自动驾驶是个复杂系统工程,一个内生成长——从小一起长大,且富有共识的团队,更能做成;CTO最重要的能力是分辨现阶段最需要什么能力,并学习、转变;在智能上,相比于AI人类并没有什么特殊性,千万不要高看人类;具身智能很火,但两年后会遇到自动驾驶遇到过的所有问题。01
Sorry,这个阶段已经过去了
远川:很多人说现在的具身智能就是2016年的自动驾驶。远川:小马2016年成立,8年后IPO,你的想法是什么?能划分一下自动驾驶(注:后文自动驾驶均指L4级自动驾驶)、Robotaxi的技术和商业阶段吗?楼天城:严格来讲在过去三年,整个市场是非常混沌的一个状态,大部分人对市场对这些信息没有统一的理解。但通过这次IPO,至少在绝大部分国际长线投资人面前,我们很好地阐述这件事情,他们也接受。很重要的点,是把信息传递给了资本市场,让大家知道现在已经到了这个阶段。下面关心的话题都是成本、规模,足够大里程后车辆的表现如何。如果你关心还能不能做demo(Demostration,示范、演示),sorry,这个已经过去了。今天应该说有一定规模,比如百辆(无人)车,这是桌面,超过这个叫桌上的玩家,没到这个就是还没上桌。桌上之后就是成本,运营、硬件折旧成本,能不能控制得很好,还有收入能够比成本高。还有一个是规模,百辆在商业化来说算很小的数字,更大的规模也是我们的目标。桌面之下要回顾一些历史,到 21 年左右是一个无人 demo 状态,领先的几家在21年做到,再往前是有人demo状态,主驾坐了安全员。楼天城:这是很可能的。我有一个很重要的观点,为什么过去五年大家会不看好,因为外部看不到进展,毕竟就算我 100 辆, 1000辆,能打到我车的人还是少数,而且不会产生正传递,因为值太少了。02
模仿学习到强化学习,L4自动驾驶的0-1
楼天城:2020年是个关键的坎,应该说是逐步理解技术的过程,我们切换到了Learning by Practicing,强化学习。之前的做法跟现在路上更常见的一样,收集数据模仿人类做法学习开车。2020年后依托虚拟环境让车自演进。跟培养小孩一样,人一生接受的教育很大程度都是 Learning by Watching,模仿学习,模仿老师的做法,成长到一定高度后才想通过自演进来强化自己。远川:从模仿学习到强化学习,小马是慢慢切换,还是推倒重来?楼天城:答案可能会让你意外。实际情况比表面上残酷得多,因为做过模仿学习,切换技术的难度反而比没做过还难。理论上复用的东西有,比如基础架构,仿真框架,车载平台,但为什么造成的困难这么大?因为它彻底颠覆了团队擅长的东西和投入的方向,会让很多人不情愿切换。而且切换之后要从零开始搭建,有很长的真空期,不是几天是两年,两年中没有交付更好的结果。但是也一直要说服所有人,这是正确的方向,之前的做法不是快慢问题,是0/1的问题,根本做不到。简单来说,这个切换是一个硬着陆。虽然有很多可以复用,但思维方式的冲击巨大。远川:这两年你怎么让团队觉得找到了一条新的路?你说了这两年也没有什么产出。楼天城:不,是重新走虽然增长很快,但是一直没到之前的水平。但我坚持的东西一直坚持,公司另一位创始人James(CEO彭军),他有技术背景也很支持。在公司里,我们把道理摆出来,把更多人拉拢到支持者阵营上。给大家一种感觉,这个决定不是我一个人做,是整个管理层一起做。还有一点略 personal credibility(个人信誉),相信我个人,这个事情我们必须这么做,是为了未来。应该说从感性上让别人相信这些方式都做了。远川:小马如何在数据量不多的情况下,在L4证伪模仿学习?楼天城:小马数据虽然不多,但那时候也不比现在很多家少。今天各家表面上可以 access(接触) 到很多数据,但收集数据其实并没有很多。还有一点,在中国数据密度大。单从收集数据量来说,我们那时并不少。那时候我们已有百辆车在跑,高密地收集数据,哪怕在那个数据上我们已经触及到了瓶颈。不能说证伪,但至少实实在在发生过用模仿学习遇到瓶颈这件事,这个瓶颈不是我们预先估计的,在我遇到瓶颈之前更早的时候,有别人跟我说过,我也没信。远川:遇见瓶颈时小马的车是什么水平,是人类驾驶员的同等水平还是不如?楼天城:不如人类驾驶员,但比今天很多车都好。安全指标MPCI(Miles Per Critical Intervention,每关键接管行驶里程)破千,千公里才有可能剐蹭。今天看这很低,我们、Waymo都是 10 万及以上。但在那时千这个数字并不差。FSD的公开测试报告只有百级别,那时候的车比今天的FSD安全性高很多。首先模仿学习没法收集到“怎么想”的数据,而开车需要知道怎么想。模仿学习能收集到行车轨迹,但司机中间的决定收集不到,比如碰到行人在路边不减速开过去,可能是没看到也可能是知道不需要。而自动驾驶不止要学到最后的行为,还要学到中间这些想法。第二叫双标。人允许人以某些概率犯一些错,但人不允许机器犯错。人接受人违法,然后受到惩治,但人不接受AI以概率违法。这导致的问题在小马发生过,学人学得越像,这些问题越多,而且持续发生。致命的第三点,模仿优秀司机其实是我切换路线之前的救命稻草,我们特意请了好司机来好好开,但后来发现致命问题,模仿学习不是闭环训练。因为驾驶员用了很多车没有掌握的信息,才做了驾驶决策,如果没有掌握这些信息,越模仿差得越远。原因是它没法拿闭环结果来 compensate(评估) 今天行为的价值。非闭环训练,学越好越会触发非对称信息,然后更差,我们也触发了“跟好司机学、反而差得更多”,因为它只学了样子。远川:非闭环训练可以理解为没法对作弊、取巧行为进行检测吗?楼天城:对。对越能作弊的人,它越明显。当时总结这三条原因,关键的领导层都get到了这一点,这样做不到L4,跟人都会差得很远,所以我们做另外一条技术路线。远川:小马是怎么去到强化学习这条路的?因为它可以解决模仿学习没有解决的问题?楼天城:都可以解决。强化学习大的框架是给自动驾驶模型创造一个(虚拟)环境在里面开,不教具体怎么开,车自己去尝试怎么开做得更好。模型训练就是求导、求梯度的过程,需要输入一些数据和reward function(奖励函数)。第一步回答闭环问题。它天生就是个闭环,因为它在里面是仿真的。再说知其然不知其所以然的问题。在整个过程中可以强迫车载模型不仅输出轨迹,还把决定、动机全部输出,通过后几帧的结果来评估,拿后面的时间、决定来验证前面对不对。双标的问题更直接,人知道什么是完美人做的,只是做不到。但对车来说,可以定义一套指标体系,就是一个好的奖励函数,告诉车什么算好。这就是世界模型做的三件事,生成场景和传感器数据,做高精度的仿真,以及Metrics(驾驶行为评估)。远川:强化学习是你们选择的新技术路径,世界模型是你们的具体实现方式。楼天城:小马的世界模型不是模型,它只是叫模型,它是个完整的训练环境。远川:这些步骤、做法之前就有,什么时候发生了什么,让小马的这套东西可以被称为世界模型?楼天城:要做这些事情的理念有很多年了,但怎么做好,做好后效果如何并不知道,那几年小马核心做的事就是如何把它做出来。它也是拿数据训练的,我从来没说数据是没用的,但只是数据不需要这么多,需要很高的精度。远川:很多企业会说它有足够量的数据,可以供挖掘高质量的数据。楼天城:不,如果没有怎么想的东西,有多少量都没用。我说的数据指的是带有开车思考过程的数据,否则算零。 2016年,Alpha Go 3:1战胜李世石,一年后Alpha Zero以100:0的战绩完胜Alpha Go
2016年,Alpha Go 3:1战胜李世石,一年后Alpha Zero以100:0的战绩完胜Alpha Go
远川:强化学习比较知名的是例子是从Alpha Go到Alpha Zero,了解这段经历的话,你们应该很容易知道该直接从强化学习开始?楼天城:Alpha Go 是先去模仿人类棋谱再做强化学习,自己对弈,Alpha Zero 是直接做强化,结果发现 Alpha Zero 比 Alpha Go 好很多。是因为Alpha Go跟人类棋谱学瞎了,学到了一个很烂的状态,还不如从零开始学。原因是写棋谱那些人在我面前很强,在Alpha Zero 面前太“蠢”了。但小马不是家研究机构,我们的目标不是找出世界上最好的自动驾驶方法,而是商业化。模仿学习短平快但天花板低,强化学习要积累很久但天花板高。一个不那么好的方法容易上手,直接能做出来,那就go for it,但我那时候没意识到模仿学习天花板这么低。遇到瓶颈之前有人跟我说过,我也没信。远川:你们是做到那儿了,发现它的天花板比你想象中低。楼天城:低很多。而且有很多不能逾越天花板的东西,不能靠努力来做。远川:强化学习会不会也存在以为天花板高,实际没那么高的问题?你怎么确认这条路线的正确性?楼天城:因为我们在桌面之上。可能有个更好的方式是几年后的技术路线,但今天既然就能商业化了,成本、规模这些更是我们考虑的因素。应该说强化学习的上限比今天的商业化要求高出很多,甚至能触及机器开车的一个极限,它不可能避免所有的事故,但能避免所有它犯错误的事故,只是还需要时间。03
做世界模型,工程能力比算力和数据更重要
远川:小马用世界模型做强化学习的过程,遇到了什么难点卡点?楼天城:指标,Metrics是第一个。什么叫开得好?三个大方向,安全、舒适和效率一定是对的,但我们做了很多工作,track(追溯)完全不同场景下的细粒度指标。这大概是 21 年发生的事情,我们原来是整体指标,后来发现不行,要 track 得很细,给每个专门的才能让它学到。原因根本上是开得不好的地方是非常低概率的,如果用整体指标,会有很小的几率淹没在里面。所以需要专门提出容易出问题的情况,让它知道这些情况表现如何,并且需要知道这些情况中这些东西出现的概率如何。L4处理的都是些非常极端的场景,那些场景究竟会不会发生,发生是什么样子,这是第二个技术上很大的改变。第三个叫 Smart Agent(智能体),整个仿真中其他物体要能够跟你一样具有智能,可以交互,交互是不是准确。交互也分为不同的参数,有些人非常激进,有些人非常保守,会有不同的配置,可以知道在不同任务 combination(组合)怎么做。楼天城:首先它逼真,在里面开车跟在真实世界感觉基本没有区别。还有是reward,你所谓的好,是你真正想要的好。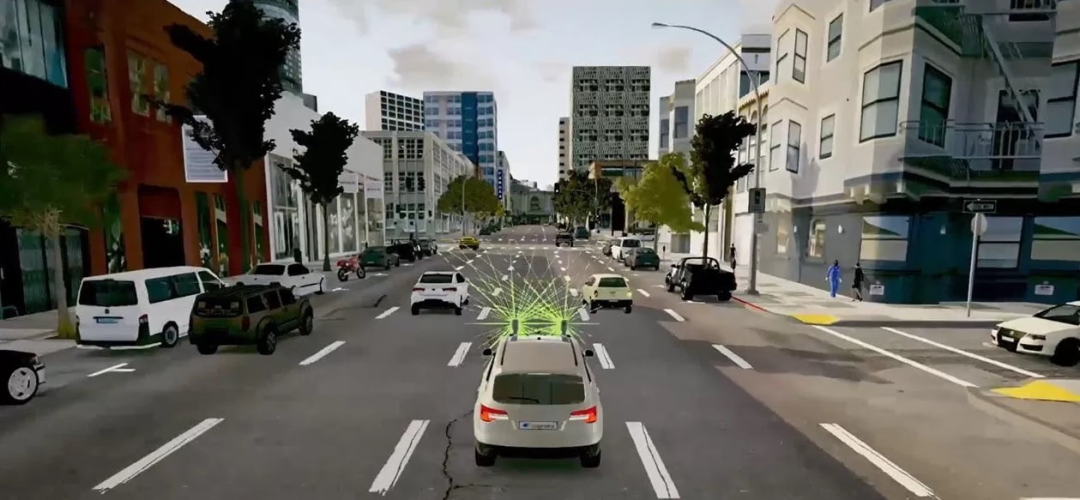 逼真是衡量世界模型的金标准之一,但“真”的含义比想象中复杂(注:该图为第三方仿真,仅作示意)
逼真是衡量世界模型的金标准之一,但“真”的含义比想象中复杂(注:该图为第三方仿真,仅作示意)
远川:这是个挺难的问题,不同人对好的理解是不一样的。楼天城:用了RLHF(Reinforcement learning from human feedback,人类反馈强化学习)。人很难直接说好,他只能说这两个我觉得哪一个比另一个好,用相对的方式反馈来做,这也是成熟框架。远川:但如果到了一个完全不同的城市,人们开车的风格可能差别很大。楼天城:L4 处理的很多都是极端场景,极端场景别说中国,世界上都长一个样,比如鲁莽的司机,不回头观察的摩托。应该说普通人开车的习惯是不同的,但是疯狂的司机开车一样。远川:刚才你提到世界模型逼真,它的边界在哪里?不可能做到无限真实。楼天城:Feedback的量降到一个很低的数字,只要最后结果差不了太多。基本我们还是由路上实际的结果来评价。远川:小马的车队在百辆级,车几十万公里才出一次安全接管,这支持你们在路上快速验证一个模型的好坏吗?楼天城:好坏不会用几十万发生一次的指标来验证,一些更高频的事件跟事故发生有一个比例概率,通过学习这个概率来估计,也是奖励函数很重要的部分。楼天城:严格讲这个比直接测量危险数字发生要准得多。而且世界模型对长尾场景的覆盖性比人为好得多。远川:对很多人来说是反常识的,因为觉得世界模型毕竟是虚拟环境,还不够真。楼天城:世界模型一天100亿公里很正常,你才开多少公里?或者说这个技术没有这么难,只是很多人不愿意接受这件事实而已,一个虚拟环境中对很多事情的概率分布把握比实际要好得多。这可能对有些人冲击极大,自动驾驶方面产品设计的人,需要承认他的工作不被需要了。因为阅历太浅了,才开这么点里程,凭啥教自动驾驶车这么开?这可能是个做转变非常难的地方,很多人开车是没见过世面的,但它在世界模型里都遇到过,而且以合理的概率遇到过。远川:小马在做的,是不断地把自动驾驶模型的训练环境变得越来越真?楼天城:给它创造更好的环境,且让它更往你想要的方向去学习。去缩小因为模拟环境不真实造成的偏差,以及把优化目标的偏差降到最小。远川:车拉开人类驾驶水平越来越远的时候,我们还能设计出很好评价它行为的标准和准则吗?楼天城:人知道什么叫好的,只是人做不到而已。它学的过程收敛会有问题,所以我们有很多中间的东西帮助它收敛,这件事情能做多好可能是有瓶颈的。最终结果,我觉得人还是知道什么是好的。楼天城:这是个好问题。现在训练大语言模型都不是靠人头来比的,牛的公司不是靠人多,这个也是。你问的是资源方面,我只能这么说,这是最surprise的事情,它需要时间来做积累,超越资源。逐步通过人的方式改进世界模型本身,它需要一个时间积累过程。楼天城:钱多一倍,你小学上学的时间能少一点?人学习一个东西需要时间,不是钱多就能学得快。怀胎得 9 个月到 10 个月,别说钱多能怀 4 个月就够了。它不满足很多人对科技发展的想象,但它是真实的科技发展的过程,有些事可以通过钱加速,有些不能。远川:但已经有三家Robotaxi在桌面上,里面很多人带有know-how,为什么不可以用钱挖这些人?楼天城:再说可能会略冒犯,这种想法可能就是落后很重要的原因,这就是为什么今天只有三家,没七八家。楼天城:在一定数量之下,它能提速,但它不是最关键的。scaling law最终都是这样(S型曲线)收敛的,它有一个增长很快的曲线,包括算力、数据是有用的,只是它的收敛点比较早地到来了,你不能指望上面这段再靠它突破。远川:这是不是意味着对头部L4公司,算力和数据的权重没那么重要?这时权重更高的是什么?楼天城:是。权重更高的是engineering(工程能力)。比如整个系统的链路设计是不是合理,各版块集成到一起有没有问题。最重要的两点是世界模型是一步步改进的,能不能快速反馈,迭代,滚动,还要朝你想要的方向去滚动,测量精度不够容易南辕北辙,原地打转。反过来刚才我想说,技术需要传承,做一个事情需要积累。用刚才说那方法的问题是做了中间,不知道后面,因为没有它前世今生的发展过程。04
L2和L4,共性聊得太多,差别聊得太少
远川:小马部署在车端的模型,是通过在世界模型中训练出来的一个云端大参数模型,再蒸馏而来吗?它的参数量是多少,重要吗?楼天城:对,重要。蒸馏是个很困难的工作,但首先训练大模型蒸馏出小模型,比直接训练小模型好得多,这是惯例,我们也这么做。可以把它叫蒸馏,等于是向自己更大算力的自己学习,但现在我们放在4个Orin上能跑起来。远川:小马的车端模型是一个One-Model(一段式模型)吗?楼天城:是。这个我觉得各家都是,没什么差别。但我们是感知和规控中间砍一刀,分两段训练,但不分两段推理,这是很典型的实际系统集成与理论之间的权衡。一段训练相比两段训练的天花板更高,一些企业觉得一段训练更好,但他们搞错关键点了。两段训练收敛更快,且训练过程可追溯,且能够很好地评估训练效果。非要一段的话刚说这些现在都不满足,它的好只是天花板的好,我甚至还没看到直接好处。远川:很多企业在用One-Model这个概念的时候,他们想表达的更多是算法栈里没有用规则,小马的算法栈里用规则吗?楼天城:模型的天花板、处理复杂的能力确实强一些,所以大家都用模型,就这么简单。当然我们冗余系统,最低的一层肯定是用规则,它的芯片跑不起模型,就是个基本功能。功能一旦复杂之后用规则确实会需要更多的努力,这很正常。工程能力差不多的两个团队,一个用规则,一个用模型,做一段时间之后到复杂场景确实用模型的好一些。远川:很多做L2的企业,因为覆盖率、成本、鲜度问题舍弃了高精地图。对L4来说,高精地图是不是长期必须的?高精地图好用吗?楼天城:高精地图的鲜度、精度离完美当然还差很远,但它今天对L4自动驾驶有巨大的帮助,体现在安全、体验的提升,成本的下降。并且Robotaxi都运营在热点区域,高精地图质量远好于其他地区。这里需要描述一下L4 的商业模式,用不用高精地图,还有激光雷达,这几个问题可能一定程度把L2 的商业模式套给了L4 。L4做运营最终非常成功的模式,可能就是集中在某些区域,扩展运营区域对它来说到一定程度收益很有限。其次它的安全性很重要,出安全问题是很严重的,所以会更倾向拿更贵的东西换取更好的安全性。这在L2、L4不完全相同,是商业逻辑影响了很多决定。远川:模型和视觉感知技术的进步,会不会以后让高精地图和激光雷达在L4也变得没必要?楼天城:技术为商业化服务很重要,一个产品有好的体验和商业化空间,那技术应该是按照它的方向发展。如果说技术强到那个程度,那还差很远,或者说可能根本到不了这一天。远川:L2与L4的发展轨迹会有什么不同,各自的天花板在哪里?楼天城:首先就是模仿学习和强化学习路线。今天L2公司我很难想他这么切换强化学习,他们都是模仿学习,且模仿学习能够做好的L2产品。在L4 我拿模仿搞不定,只能强化学习,然后造成差别,关键关注点会不同。很少见 L4公司说自己数据量大,因为我们用强化学习,比的是世界模型精确性,但那边比的是数据量。两边工程团队的优化关注点不同。大家的目标、成本空间不同。L2对成本、应用范围很敏感,L4在成本空间上有很大的Flexibility(灵活度),但运营空间在一定区域。还有实际要达到的水平。L2模仿人很重要,需要让人理解它想干什么。反过来,一个好的L4系统不是好的L2系统。我坐我们的车经常不知道是不是该接管,因为它确实不是按照人的逻辑做的。L2 车这么开,肯定会被骂死。安全性来说,L2 就算几十公里接管一次很正常,它没有这么高的要求。大家的优化目标变成一个不平衡的状态, L4 安全要求很高,所以要投入安全;L2因为成本压力很大,就保持安全OK,然后成本降下去,范围做大。这是两类公司发展都非常合理的方向,没有任何人做任何错的事。只是在很多讨论中大家喜欢把两个放在一起,说更多共性,没有说那么多差别。所以我说出了那句话,一个做得更好,就会离另外一个更远。05
从L2做到L4的企业,not on the table yet
远川:一些车企会有更大的带宽,既在做L2,也想做L4,他们也使用生成数据、世界模型、强化学习,有更强的资源、现金流、算力,他们有没有可能追近或者反超小马?楼天城:最大的问题在于你说的所有积累都是hurdle(障碍),都不是积累。抛开小马不谈,车企跟IT公司相比,这都是劣势。你知道IT公司的利润率有多少?人才吸引力可以比吗?算力可以比吗?你知道字节有多少算力吗?如果突然有一家IT公司要做L4,它在各种场景下都好于车企,除了它需要跟车厂建立合作而车企不需要。车企可以做,但是需要把做 L4 公司做的事情都做一遍,且它在L2上的积累可能会阻碍。车企为什么会比IT公司更想做L4,give a reason。楼天城:科技公司不想成为科技公司吗?科技公司更想成为更好的科技公司。远川:现状是很多车企已经在这么做了,在做L2的同时往L4这个方向做。楼天城:这个话题可能不能再 touch(触碰)了,我是个偏执的结果主义者。从结果上他们并没有在做。远川:你之前说做 L2 做得越厉害,离 L4 越远。小马自己也有L2的团队,这句话在你们身上成立吗?楼天城:我们有两只独立的团队。开始在一起做,团队思维方式上很大的冲击,说话频道都不太一样。L2对成本特别较真,L4没有那么较真;L2会想常规场景要做好,极端场景交给人接管,L4是反的,平均情况差不多就行,极端情况每个都要兜底。两拨人工作起来脑子没有overlap(重叠),所以L2是剥离团队来做。楼天城:管。但是俩团队之间不交流了,他们之间不冲击了,冲击我。楼天城:清晰只是说L4上去了,没有说L2下去了。当然对公司可能有聚焦或者我精力上潜移默化的影响,但不表示它不是一个 OK 的生意,包括我们还有Robotruck(自动驾驶卡车),这仨单拿出来都是世界上前 1% 的事情。远川:一些以L4为目标的智驾企业认为要曲线救国,掉头从L2做起,现在活得也不错,你怎么看?楼天城:L2 本身是top 1% ,活得不错很正常。但要天花板往上走,融资额还是 L4 公司碾压。Waymo这波没有人可以跟其去一个 0(的融资额) 相比,Wayve也是10亿级的规模,我们上市也是过去一年美股自动驾驶领域最大规模融资。资本的回应很明显。远川:这些从L2走到L4的智驾企业,在你的竞争对手列表里吗?楼天城:竞争我觉得不是坏事,这个行业足够大,大家一起做出来应该都有非常好的前景。但另一点我觉得,they are not on the table yet。远川:你们都相信自己的路是通向L4的正确路线,你们和特斯拉最本质的不同是什么?特斯拉有很多值得尊重的地方,特别是马斯克本人,且FSD是个非常好的L2系统,但模仿学习的几点问题他都没有回答我的疑问。但如果他拿结果打我脸,我立刻检讨自己哪个点想错了。根本上,它是有科技属性的公司,有很多科技不错的人,我的很多朋友在特斯拉,这是我尊重它很重要的因素。06
今年的运营目标,赶上Waymo今天的状态
远川:既然现在小马在桌上了,今年工作重心会是继续搞技术迭代,还是Robotaxi的运营? 楼天城:技术发展也是为了商业目标,小马一直是家商业化公司,只是之前没有办法商业化。今年第一是成本结构,包括成本降下来,单车收入提上去。然后是规模,我们跟丰田、广汽、北汽三个车厂合作,技术研发以支持这两个方向为最重要的目标。远川:小马第六代车选了丰田赛那,一般认为运营智能化程度高的电动汽车更好,为什么选择丰田,因为是股东?楼天城:我们最后规模化、商业化的一定不是赛那。每一代有每一代的目的,第五代是做全无人,不管成本;第六代要到一定规模,第七代要更大的规模、更好的成本结构。成本不在第五、六代考虑中,选赛那就不是问题。至于智能化本身,车底盘上丰田有很多积累,线控应该说好于很多公司。还有一点能坐更多人的车更受欢迎。 小马智行第六代无人车基于丰田赛那,第七代无人车(之一)基于丰田铂智4X
小马智行第六代无人车基于丰田赛那,第七代无人车(之一)基于丰田铂智4X
楼天城:可以这么说,Waymo今天的状态。它有 800 到 1, 000 辆车,现在可能更多。而且它的单车财务为正,每辆车的成本折旧跟收入能够抵平,这也是我们的目标。 楼天城:早了一年,对外公布是在去年10到11 月份。 远川:你之前说感到可惜不能证明小马比Waymo做得更好。 楼天城:那是因为我没法在美国做,但今天他确实做得比我好。 远川:但如果你们 21 年成功上市了,节奏是不是会不太一样? 楼天城:那不一定。那次没有机会上市有一些客观原因,但仍然觉得当年虽然迷失过,可以换来今天更好的相遇。 远川:为什么你觉得商业化节奏可能不会更快?你说过自动驾驶的技术进度已经过半了。 楼天城:但21年时还没有,如果那时候上市了,可能会影响技术的尽头,如果0-1过不去,这是致命的。我们是 22 年底过的这个坎,Waymo也没那么早。 远川:所以那段时间虽然你们没有成功上市,反而让你们在一个相对平静的状态下度过了幻灭期? 远川:回到现在,Robotaxi商业化主要的要素,技术的进度已经过半,其他要素的进度呢? 楼天城:首先政策非常支持,甚至领先于技术状态,这也是中国很重要的优势之一。然后产业链,量产能力上跟OEM有差距,我们在学习,做到Waymo那个规模肯定能学习到。还有运营。我们百(辆车)还是能正常运营,到千(辆车)有很多事要做,我们结合市场上比较好的经验,去理解运营有人、无人车的差别。比如车的状态,车自己在外面运营不一定把握很准。车回车库时是自动的,所以有整个自动化运营过程。包括乘客我们做了很多远程支持,原来问司机,现在问客服。 远川:小马不是强运营出身,会是弱点吗?运营问题能不能通过你的技术来解决? 楼天城:千级别运营自己做是很有必要。首先需要做一个样板,才能跟别人合作,且我需要根据自己对自动驾驶的了解,把运营很多细节打磨得更清楚。但我也不会高看技术,我一直在学习运营需要解决的问题,特别是通过吸引更多有经验的人,还有跟已有的平台合作,比如如祺、高德。 远川:现在是在自己的打车平台上接单多,还是在第三方平台更多?未来以自己为主还是第三方平台为主? 楼天城:千辆规模我们肯定会自己做,之后运营会更多依赖于合作。远川:小马和丰田、广汽、北汽合作Robotaxi车型,和多家打车平台有合作关系,自己又有打车APP,你们怎么协调利益关系? 楼天城:我真说我做到十几万规模别人也不信。千级别之内更多的还是做一个很好的样板房,之后再合作,所以将来这个不会成为合作障碍,是一个合作的基础。楼天城:这是之一。还有每个公司有自己 DNA 擅长的东西。另外所有的大规模商业化,都是以合作,大家各自发挥所长来做。这也是历史经验。 远川:最近发生了一些案例,大家的讨论是不要攒局,能自己一个人干的事情,权责可能更明晰。 楼天城:软件各种模块我们都自己写,这玩意儿总有个度,总要对擅长和不擅长的有一个界限。如果所有东西都没有做,独自揽一个大局,可能有它的好处。但今天网约车是成熟状态,车辆生产也是成熟状态,这时候再都自己做不一定是好的。远川:听说小马的无人车会在相当长的一段时间里保持比快车更高的定价。通常认为无人车的竞争力是比人类司机更低的成本,为什么这么去定价? 楼天城:这不是我一个人决定,有商业上的考量。但我期待自动驾驶能够提供比人类驾驶更好的体验,而不是只是从价格上考虑,不会接受单靠低价格去卷。远川:比较流行的认知是打车市场是价格驱动,大家只对价格忠诚,体验驱动的市场有多大? 楼天城:中国有几百万的网约车,就算万也只不到1%,占整个市场1% 肯定是有的。 楼天城:就算将来有一天想降价,至少体验也要拉住。我还是希望至少很长时间内,大家是觉得体验好,整个体验consistent(连贯稳定)来坐自动驾驶,而不仅仅是因为便宜来坐。 远川:那海外呢?小马和丰田有合作,会不会在日本落地Robotaxi?日本老龄化、劳动力不够,像是比国内更理想的市场。 楼天城:首先我觉得国内也挺理想的。今天我们主要部署欧洲、香港、中东,新加坡、韩国,当然今天还并不能轻易判断某个市场是一个好的市场,但一定会有很多。但政策上海外还需要一些时间,更像我们在17、18年的时候中国的状态。他们需要走过这段路程,需要实践,这个可能才是真正的决定因素。远川:Robotaxi的出海会伴随模型的出国,在全球不同地区,需要做什么样的适配工作?模型重新训练会不会是很大的阻碍? 楼天城:国外要搭训练环境去重新训练,这很正常。当地可能首先会关注数据安全,世界模型也涉及数据安全,它生成了很多东西,严格讲也是有已有数据的印记。小马很早在意这件事,所以各地都会有布局。关于Robotaxi的驾驶能力,这是L4和L2的不同,L4的好处是可能需要一些训练,但是量可能非常小,因为到新地方只需要弥补应对普通驾驶状态的能力,而L4最难的极端情况在各地相似度非常高,这块需要的可能就是小的补丁。楼天城:相当于我们在国内的17、18年,业务没法超越政策。老龄化可能是推动海外政策前进的一个原因,但单从政策成熟度来说,中国高于海外(不包括美国)。但如果(海外)政策突然放开, 不代表我们也要走过这么多年。07
复杂系统工程,要求团队Organic Growth
远川:有看法认为,Robotaxi毕竟有很强的运营属性,当你是一家人才密度比较高,软件基因较重的公司,不太能做苦活累活,这个说法成立吗? 楼天城:一个团队可以稍微偏科一点,但偏太多的话团队性价比非常低。我们从19 年开始做运营,在人才结构上有一些积累,并不是你说的这种状态。但一种属性的团队擅长做一类事情,我非常认同,这也是为什么跟相关企业合作。远川:这和组织发展相关。你认为做成 L4 ,更多指Robotaxi, 需要什么样的组织?楼天城:第一是growth ,Organic Growth(内生成长),团队在需要一些职能的时候引入这些职能,和公司从小到大一起成长,在它应该有的时候就有,而不是在它应该有之后很久才有,那叫空降,损害非常大。简单说自动驾驶是一个非常复杂的系统性工程,要处理方方面面,不能有一个应该做的事被落下,后面再靠硬补。不是说后面那个能力跟不上,而是大家没有走过一起从小长到大的过程,关系是完全是混乱的。不是说团队的人员要这么稳定,但至少积累能够延续传承。还有一个是“真正通过长期积累,而不是通过一颗silver bullet(银子弹,指一劳永逸的办法)把事情做好”的共同认知,也是极其罕见的。罕见在什么地方?耐心的意识要有,但还要耐心的能力和资本,能看清耐心是有价值的,不是一件事做很慢就叫耐心,对一件事需要做多久能有回报要有共识。跟这个相关,碰巧创始团队所有人一生中都经历过这样的事:想要什么东西靠自己努力获得。如果没有这个对团队是非常大的伤害。楼天城:他09年就开始了。Chris Umson(谷歌无人车项目创始成员,现Aurora CEO)去的时候,车在沙漠里能跑就不错了。然后车一步步走起来,后来需要的也一步步来,非常符合这个属性。楼天城:但他的技术传承了。Waymo每个人待了很长时间,大家一起讨论、干活,有技术传承。应该说硅谷顶尖的科技公司都经历过我说的前两条。楼天城:这是公司发展阶段造成的变化,发生过很多次,但跟 IPO 没关系。一两年之内我对成本和体验的关注明显比之前多,下面关注量产跟车厂的合作,这是这个阶段真正关注的点。远川:这会不会是你没那么喜欢的工作?你应该对神经网络或杠杆率更高的工作感兴趣?楼天城:作为 CTO 要随着技术、阶段变化,让自己的能力跟得上这个阶段,如果有最好,没有就去学,学会了最好,学不会就找这样的人,把他当partner(合伙人),跟他请教或者依赖他做这个事。后面这一半最近发生了很多次,这才是对公司最有益的做法,这个能力恐怕才是对 CTO 最重要的能力要求。 CTO楼天城与CEO彭军
CTO楼天城与CEO彭军
楼天城:首先要分辨现在最需要的能力是什么,且能够学习、转变。远川:你是运筹帷幄型的CTO,还是带队攻坚型的CTO?楼天城:都有,什么需要做什么。现在前者多一些,但攻坚也会发生,后者前期多一些。远川:你心目中一流的公司是什么样的,你对小马的期待是什么样?楼天城:我是个偏执的结果主义者。结果好的公司是哪些?有成功的商业化,还有一些底蕴,市场发生一定的变化它能够很稳地应对。今天我们对变化应对了一些,虽然有时候不太想应对。商业化产品还没那么成功,从市值上表现比较明显。楼天城:AI催生的可不止这些。Open AI把它分成五级,有基本语言能力是第一级,和组织没啥关系。第二级能做很多的辅助工作,已经有些关系。第三级如果能取代的话,会很不相同,人跟 AI 之间如何配合?要把 AI 当成组织形态一部分了,这是很大的挑战。简单说,(催生新组织形态)有可能,可能最终是取代一部分人作为前提发生。远川:AI也对小马产生了冲击,你们切换了技术路线。AI技术的变化很快很广,这个过程如何避免迷茫?楼天城:这跟行业有关系。从搜索引擎到手机互联网再到人工智能时代,每过三四年热门话题都在变,坐在前面的却还是这几家公司,一方面是底蕴,另一方面是这个领域的人对每过几年有一个大变化习以为常。有这样一些变革,甚至不会对领域中leading(领头)的人有特别大的触动。楼天城:我不表示因为我是CTO,就跟大家不同。大家都是这个行业一路走过来的人,应该都看到这行业的发展。干这行的人,这是他生存本能。远川:小马花了8年时间做商业化的准备,这么漫长的过程,反馈系统要如何建立,防止大家迷茫?楼天城:做有感受的年度目标。比如五年前,我并没有前人的路,我甚至不知道前面有多远,但是我仍然需要告诉他们。两年前我们开始做真正的纯无人化,到年底可以请你的亲戚朋友来体验,这就是这一年的目标。楼天城:因为他们自己理解,但很可能亲戚朋友不理解。很多时候公司目标不是做给员工看的,是做给他亲属看的。
08
自动驾驶遇到的问题,具身智能过两年都会遇到
远川:AI这波浪潮,有没有带来什么你曾经深信不疑的,但后来充满怀疑的认知冲击?楼天城:Alpha Go本身有点冲击,因为我个人很喜欢下围棋。但这种冲击不是对AI潜能的冲击,而是对人有多蠢的冲击。我一直觉得人还是很聪明的,当时发现人原来这么蠢,千万别高看人类。人对“人才是掌控”有非常强的认知,其实根本不是。Alpha Go这个例子,人的思维不过是对一些形状多记了一些,多算了几层,人并没有想到很多AI想不到的东西。今天的AI还没做到很多人能做到的东西,但是也没多出太多差别来,我们并没有什么特殊性。到工作中,我看我们车开得跟我想法不一样的时候我不敢啰嗦,因为有可能是我太弱了。楼天城:是。Alpha Go出来后大家质疑它的商业前景,这没错。我在想智能将来做到比人好,什么事是真正能落地的?到今天为止,我仍然觉得当时做了正确的决定,自动驾驶可能还是所有中最容易的。比如具身智能、Chatbot都比自动驾驶难,它们今天还火原因是也在创业早期,等走到自动驾驶这个阶段的时候,自动驾驶遇到的问题每一个它们都会遇到。自动驾驶,出行是刚需,而且出行本身有价值,且上下游产业链,车、运营平台是成熟的。这应该是所有 AI 应用中基本最成熟的东西,你看其他东西,根本就不ready。楼天城:Good point。我会这么回答,对真空期的忍耐能力要求高了,比当年出来难了。Elon 10月 10 号那个 demo 如果放在17、18年肯定很震撼,但今天,sorry,桌面不在这儿,这就是进来晚带来的压力和难度。但他不需要考虑投资人,他自己挣钱就行。就启动真空期变得特别长,难度变大了,但单从技术上我觉得还有很多机会。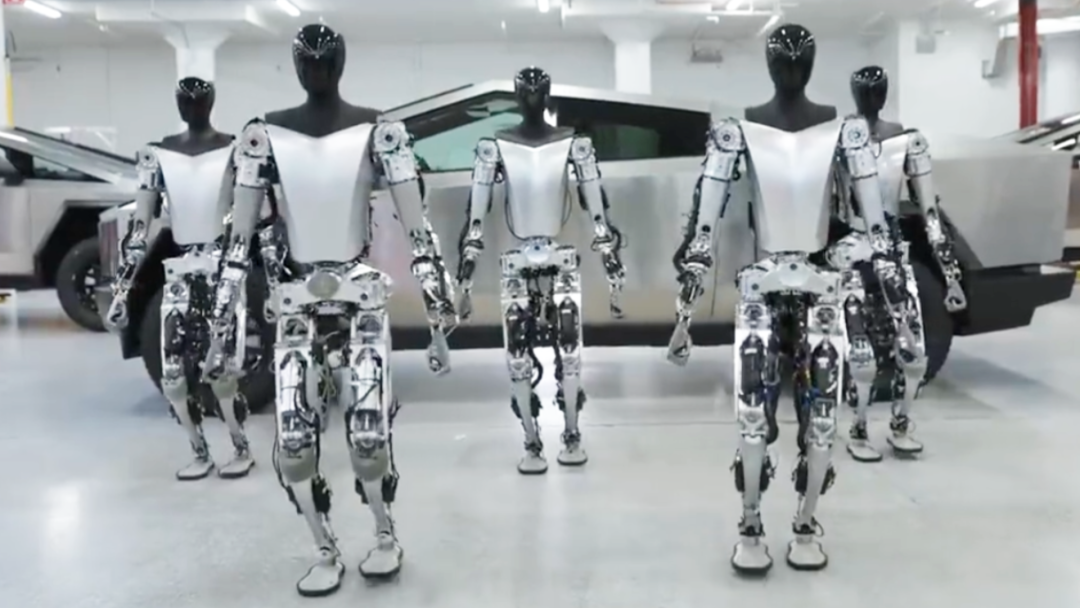 特斯拉提出的新课题:要不要既做自动驾驶,又做具身智能远川:特斯拉也做机器人,这种很性感的事在小马的规划里吗?楼天城:前两年很性感。但我还是觉得两年之后它都会遇到我今天发生过的所有问题,所以我不看好它之后的未来。如果那天能解决自动驾驶早就解决了,我没必要从一个很好解的问题跳到一个更难且更早期的问题去。远川:那小马以后会做吗?是有规划没到阶段,还是说根本没有这个想法? 楼天城:现在还是更专注自动驾驶,之后降维到自动驾驶其他领域,包括Robotaxi之外L4的其他应用,甚至包括L2,L4的能力上量产车,这些都是Robotaxi做成之后再打开的很重要的市场。远川:有一种看法认为具身智能包含对世界更完整的认知,更多自由度的运动能力,它上限更高,做成了之后可能会反过来降维打击自动驾驶。楼天城:我选自动驾驶也不是因为它天花板最高,只是它足够高,且真实现是可以看得到的,具身智能就太难了。做个demo,在自动驾驶是 15 年甚至 14 年的事,具身智能这关还没过。后来我们一直走到今天,严格讲还没有大规模商业化,具身智能只会遇到更大的困难。它还没管成本的事,商业模式存不存在都还没管,更多是能力的证明。但很多技术理念大家可以多交流,世界模型这个词也是从具身智能中来的。远川:国内的L4公司里,小马的商业目标可能是变动最小的,是什么让你和James这么坚持?是之前受过的教育,圈子里的同辈压力,或者说追求更高的成就感,还是就想赢?楼天城:都有,不过可能更重要的一点,我抵制住了诱惑。很多变化大的公司,我真不觉得是因为他们状态真的就不好了,或者坚持不下去了,而是因为有诱惑,让他觉得太诱人了,被一些短期的东西所迷惑。楼天城:做了之后没法达到原来的高度,也是一个诱惑。或者至少我看清了很多,短期看似很好的,但长期不如自动驾驶的,既包括天花板不如,也包括实际可行性不如。比如具身智能的天花板更高,但我也没有做,有些天花板更低的定位其实是一个平衡。楼天城:坚守多年,一直做这个事直到把它做出来,中间遇到各种困难的时候都是走自己最想走的一条路,而不轻易地委曲求全。谷歌、Facebook创业前几年的经历都跟这故事有很接近的地方,首先以终为始是肯定的,还有各种很 regular (常规)的事情一路做到底,没有突然间有个 silver bullet,这跟所有的武侠小说或者电影拍的完全不同。它不能满足绝大部分人对一个成功好公司的想法,但这是好公司应有的样子。就像欧洲杯冠军西班牙12年的样子,4比0意大利,决赛。没有什么峰回路转,没有绝杀绝平,一路上非常平缓,那才是冠军应有的样子。但它完全没法满足球迷的想象,大家都觉得踢得很boring。楼天城:对,他在那个时代是传控足球,但后来不是也拿了冠军。他拿了冠军别人说传控足球好,后来用别的踢法拿了冠军又说别的好,所以结果才是关键,过程不是。楼天城:偏执的结果主义者。这帮助我少走了很多很多弯路。
特斯拉提出的新课题:要不要既做自动驾驶,又做具身智能远川:特斯拉也做机器人,这种很性感的事在小马的规划里吗?楼天城:前两年很性感。但我还是觉得两年之后它都会遇到我今天发生过的所有问题,所以我不看好它之后的未来。如果那天能解决自动驾驶早就解决了,我没必要从一个很好解的问题跳到一个更难且更早期的问题去。远川:那小马以后会做吗?是有规划没到阶段,还是说根本没有这个想法? 楼天城:现在还是更专注自动驾驶,之后降维到自动驾驶其他领域,包括Robotaxi之外L4的其他应用,甚至包括L2,L4的能力上量产车,这些都是Robotaxi做成之后再打开的很重要的市场。远川:有一种看法认为具身智能包含对世界更完整的认知,更多自由度的运动能力,它上限更高,做成了之后可能会反过来降维打击自动驾驶。楼天城:我选自动驾驶也不是因为它天花板最高,只是它足够高,且真实现是可以看得到的,具身智能就太难了。做个demo,在自动驾驶是 15 年甚至 14 年的事,具身智能这关还没过。后来我们一直走到今天,严格讲还没有大规模商业化,具身智能只会遇到更大的困难。它还没管成本的事,商业模式存不存在都还没管,更多是能力的证明。但很多技术理念大家可以多交流,世界模型这个词也是从具身智能中来的。远川:国内的L4公司里,小马的商业目标可能是变动最小的,是什么让你和James这么坚持?是之前受过的教育,圈子里的同辈压力,或者说追求更高的成就感,还是就想赢?楼天城:都有,不过可能更重要的一点,我抵制住了诱惑。很多变化大的公司,我真不觉得是因为他们状态真的就不好了,或者坚持不下去了,而是因为有诱惑,让他觉得太诱人了,被一些短期的东西所迷惑。楼天城:做了之后没法达到原来的高度,也是一个诱惑。或者至少我看清了很多,短期看似很好的,但长期不如自动驾驶的,既包括天花板不如,也包括实际可行性不如。比如具身智能的天花板更高,但我也没有做,有些天花板更低的定位其实是一个平衡。楼天城:坚守多年,一直做这个事直到把它做出来,中间遇到各种困难的时候都是走自己最想走的一条路,而不轻易地委曲求全。谷歌、Facebook创业前几年的经历都跟这故事有很接近的地方,首先以终为始是肯定的,还有各种很 regular (常规)的事情一路做到底,没有突然间有个 silver bullet,这跟所有的武侠小说或者电影拍的完全不同。它不能满足绝大部分人对一个成功好公司的想法,但这是好公司应有的样子。就像欧洲杯冠军西班牙12年的样子,4比0意大利,决赛。没有什么峰回路转,没有绝杀绝平,一路上非常平缓,那才是冠军应有的样子。但它完全没法满足球迷的想象,大家都觉得踢得很boring。楼天城:对,他在那个时代是传控足球,但后来不是也拿了冠军。他拿了冠军别人说传控足球好,后来用别的踢法拿了冠军又说别的好,所以结果才是关键,过程不是。楼天城:偏执的结果主义者。这帮助我少走了很多很多弯路。



