

简介
EtherCAT CoE(CAN over EtherCAT)是 EtherCAT 协议中的一种通信协议,它将 CANopen 应用层协议集成到 EtherCAT 网络中,用于分布式系统中的设备控制和数据交换。它结合了 CANopen 的易用性和 EtherCAT 的高性能优势,广泛用于工业自动化、运动控制和传感器网络等领域。
以下是 CoE 的主要特点和功能:
基于CANopen:
CoE 的应用层直接采用了 CANopen 的设备协议,包括对象字典(Object Dictionary)的结构和服务。
通过对象字典定义设备参数、通信对象和控制数据,确保了设备间的互操作性。
支持标准服务:
SDO(Service Data Object):用于点对点的配置和诊断通信,允许主站与从站交换大容量数据(如参数配置)。
PDO(Process Data Object):用于实时通信,传输小数据量的周期性过程数据,支持快速响应。
Emergency(EMCY)消息:用于报告设备异常情况。
NMT(Network Management):提供网络管理功能,如启动、停止和复位设备。
高效传输:
EtherCAT 的总线结构和高速帧处理能力,使 CoE 能以更低的延迟和更高的效率进行数据交换。
支持多种应用场景:
适用于工业设备配置、实时监控、参数诊断和系统集成等。
对象字典映射:
对象字典以层级结构组织设备的数据和功能。
EtherCAT 使用 CoE 协议访问对象字典中的变量,以实现参数读取、写入和实时控制。
典型应用:
用于支持复杂控制逻辑的驱动器(如伺服驱动)。
用于监控、调试和配置设备的工程工具。
本节将演示如何使用Beckhoff TwinCAT3和EtherKit开发板实现EtherCAT COE主从站通信,该示例工程
已支持CSP及CSV两种操作模式。
前期准备
软件环境:
RT-Thread Studio
https://download-redirect.rt-thread.org/download/studio/RT-Thread Studio_2.2.8-setup-x86_64_202405200930.exe
RZN-FSP v2.0.0
https://github.com/renesas/rzn-fsp/releases/download/v2.0.0/setup_rznfsp_v2_0_0_rzsc_v2024-01.1.exe
Beckhoff Automation TwinCAT3
https://www.beckhoff.com/en-us/support/download-finder/search-result/?c-1=26782567
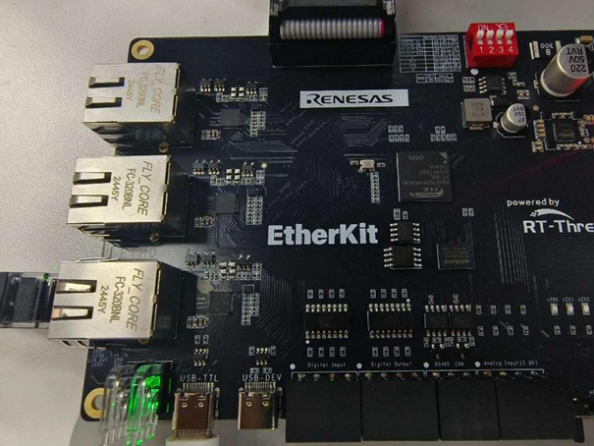
硬件环境:
EtherKit开发板(购买链接:https://item.taobao.com/item.htm?ft=t&id=855679103445)
网线一根
Jlink调试器
CiA402伺服使用说明
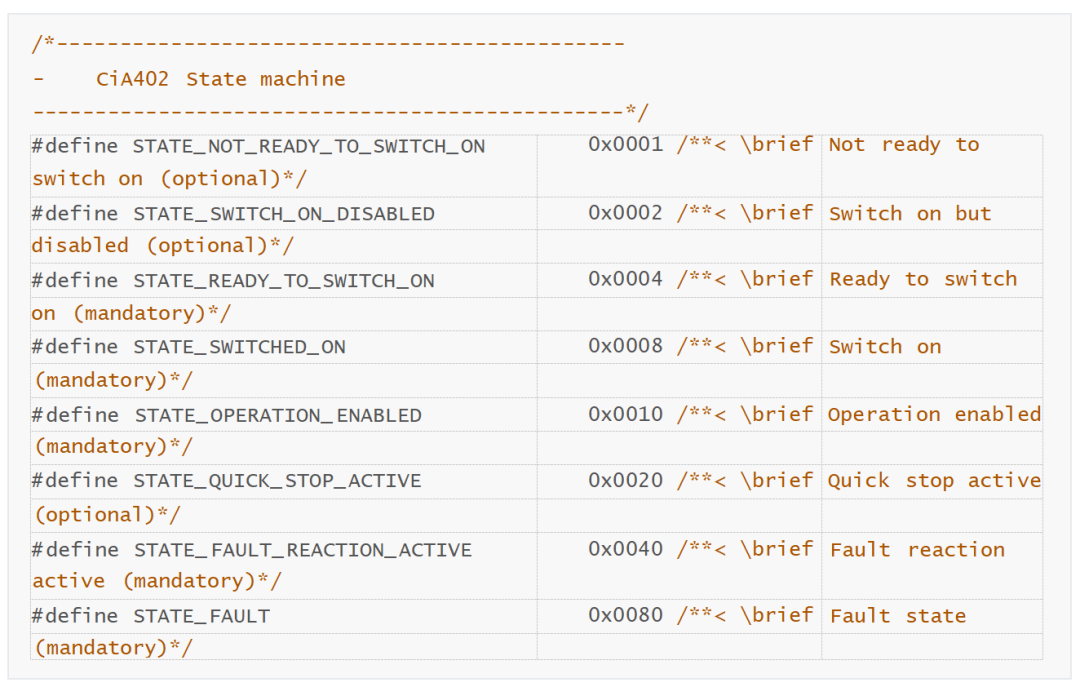
首先来看下CiA402协议:CiA402协议(Communication Interface for Drive Systems)是由CiA (CAN in Automation) 组织定义的,用于工业自动化领域,特别是针对电机控制系统的标准化协议。CiA402是驱动器和运动控制器CANopen设置子协议,定义变频器、伺服控制器以及步进的接口,它是国际标准IEC 61800-7系列的组成部分。CiA402协议基于CANopen通信协议,并在此基础上扩展和优化了用于运动控制系统的功能。它主要用于伺服电机、步进电机以及其他类型的电动驱动系统的控制。
接下来看下FSA(有限状态自动机)显示驱动器的不同状态以及如何执行它们之间的转换。
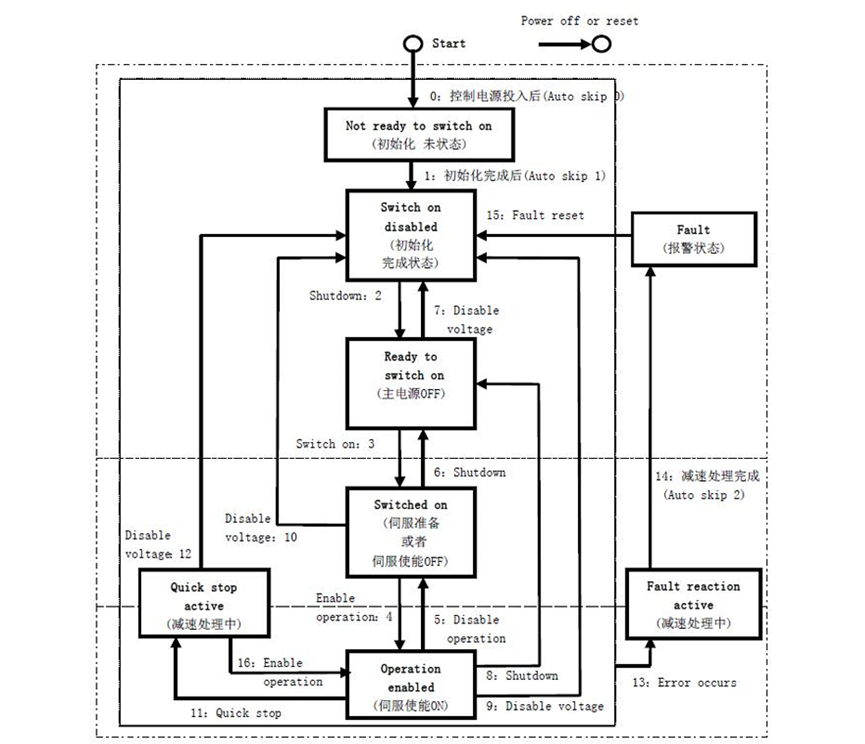
下面是对应上图各个状态的详细说明:

对于控制器来说,在通信的每个周期内,都需要主站向从站发送控制字(control word),并且接收从站的状态字进行确认,比如说本工程中通过CiA402_StateMachine()实现CiA402的状态切换:
与此同时,主站通过读取从站的状态字(status word, 0x6041)来了解从站当前正在运行的状态,通过 status word可以了解关于从机当前状态和可能发生的故障或警告的详细信息:

而主站通过控制字(control word, 0x6040)向从站发送控制命令,以此来改变其操作状态或触发指定的动 作:

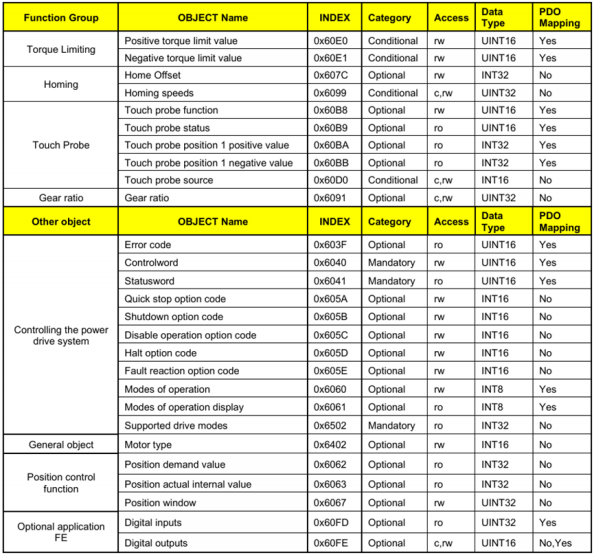
CiA402对象字典定义
下面是有关CiA402对象字典在EtherKit CoE工程中支持的列表,其中已经支持了位置模式及速度模式, 可通过主站去设置控制字来与从站的过程数据进行交互,基于CoE协议完成对控制器的读写:

TwinCAT3配置
在启动TwinCAT3之前,我们还需要做一些配置操作:
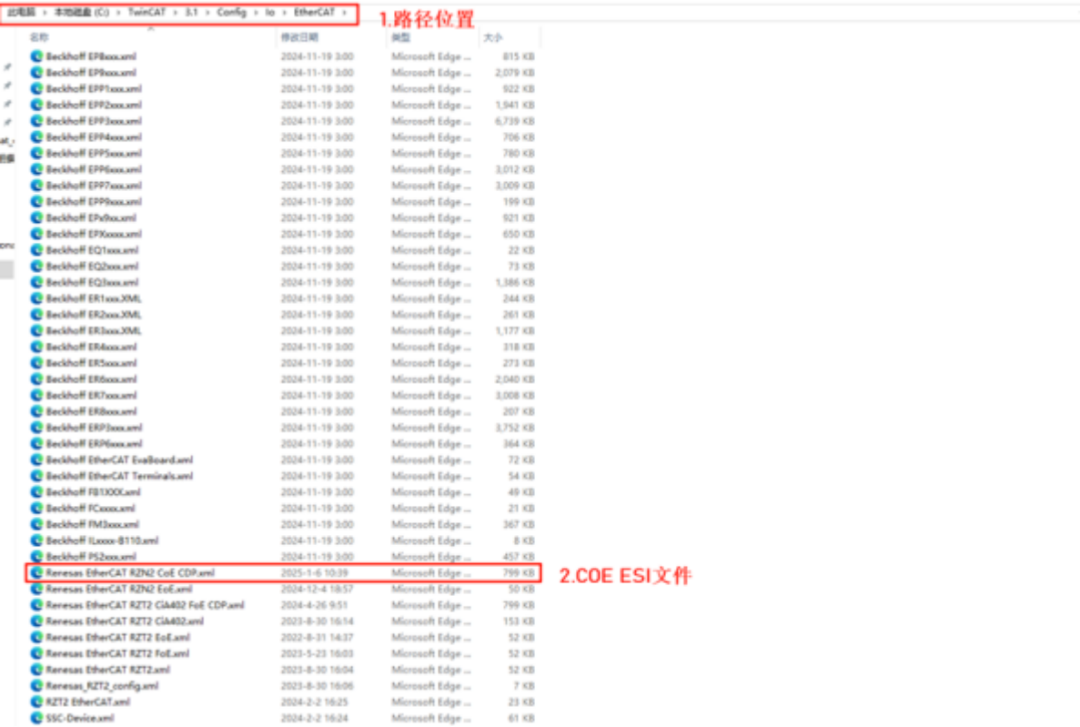
安装ESI文件
启动TwinCAT之前,将发布文件夹中包含的ESI文件复制到TwinCAT目标位 置:..\TwinCAT\3.x\Config\IO\EtherCAT
注意:当前版本的 ESI 文件位于:..\board\ports\ESI_File\Renesas EtherCAT RZN2 CoE CDP.xml
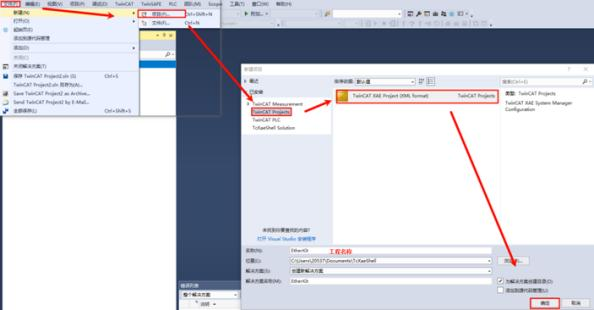
新建TwinCAT工程
打开TwinCAT软件,点击文件->新建->新建项目,选择TwinCAT Projects,创建TwinCAT XAR Project(XML format)工程:
从站启动CoE App
将EtherKit开发板上电后,需要使用网线连接ETH0网口, ethercat会默认运行。
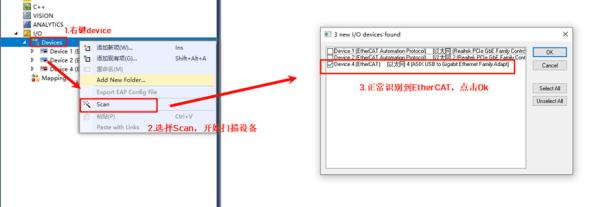
从站设备扫描
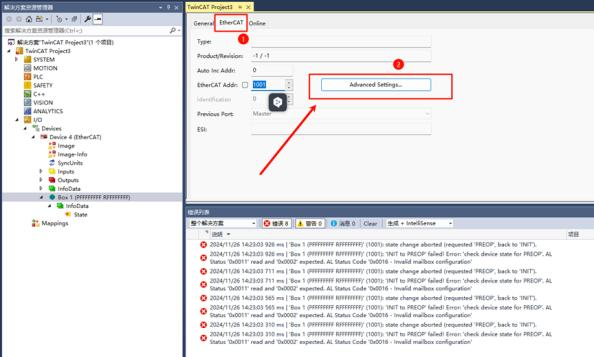
新建工程之后,在左侧导航栏找到Devices,右键选择扫描设备。正常来说如果扫描从站设备成功的话是 会显示:Device x[EtherCAT];而扫描失败则显示的是:Device x[EtherCAT Automation Protocol],此 时就代表从站初始化失败。
点击Ok后会弹出一个窗口:Scan for boxes,点击确认后,会再次弹出窗口:Activate Free Run,由于 我们首次使用CoE还需要更新EEPROM固件,所以暂时先不激活。
更新EEPROM固件
回到TwinCAT,在左侧导航栏中,由于我们已经成功扫描到从站设备,因此可以看到主从站的配置界
面:
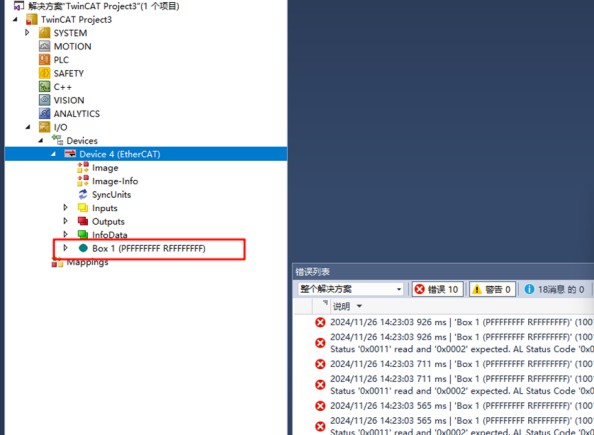
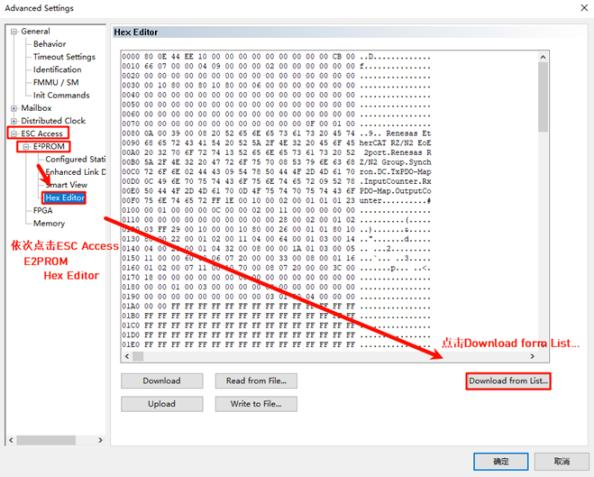
我们双击Box 1,在中间界面的上方导航栏中单击EtherCAT,并点击Advanced Settings …:
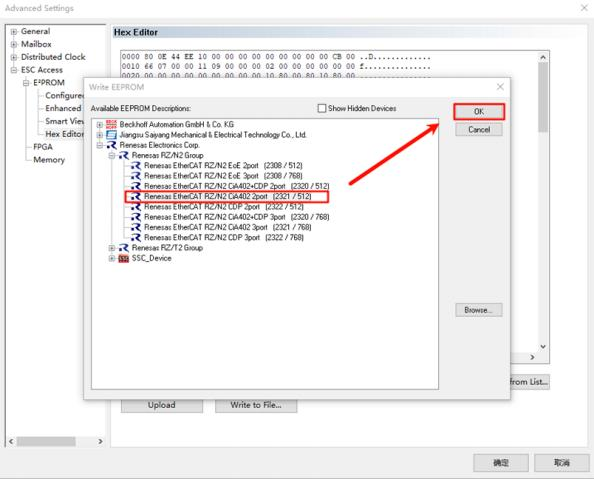
这里按图示点击Download from List …:
我们写入ESI固件到EEPROM中,这里由于我们配置的是双网口,所以选择Renesas EtherCAT RZ/N2 COE 2port,如果你配置的是三网口的话则选择3port后缀的ESI文件进行下载。
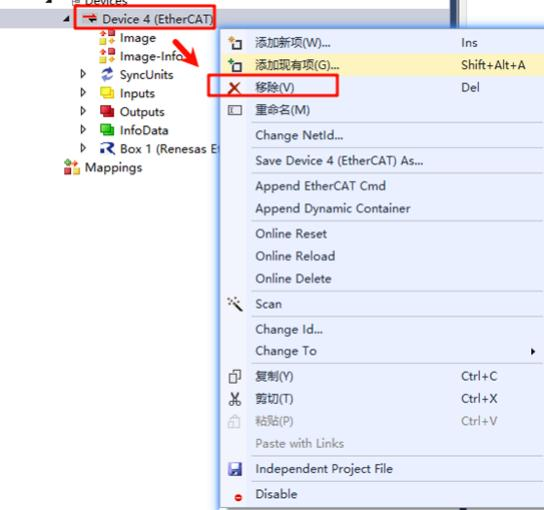
下载完成之后,我们右键Device x(EtherCAT)移除设备后重新扫描并添加设备,并完成激活工作(参考 上文)。
EtherCAT COE测试
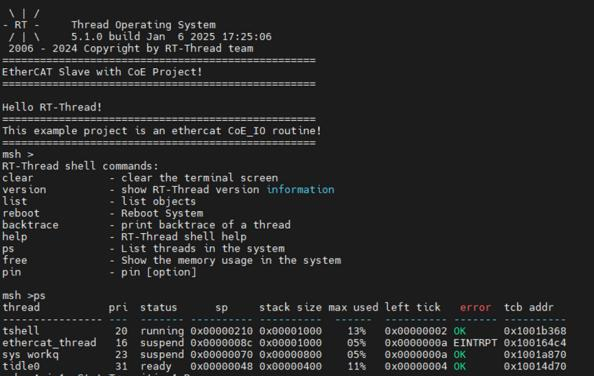
首先我们需要确保程序已经正常下载至工程中,同时ESI文件已经成功烧录,下面是开发板串口终端打印 信息:
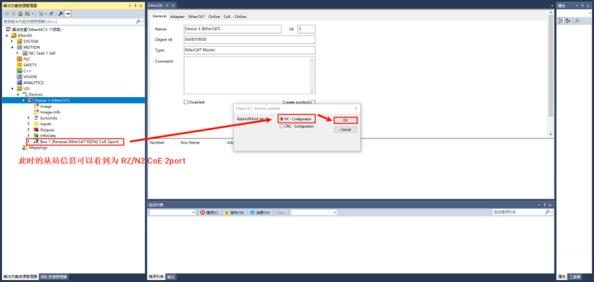
同时我们打开前面新建的ESC工程,并且扫描设备,此时会弹出EtherCAT drive(s) added,我们选择NC
– configuration,点击OK后并激活设备:
成功激活后, EtherCAT状态机会依次经历Init->Pre-Op->Safe-Op,最后到Op(Operational,可操作状 态) , EtherKit CoE工程默认开启csp (周期同步位置模式),并且支持csv(同步周期速度模式)。
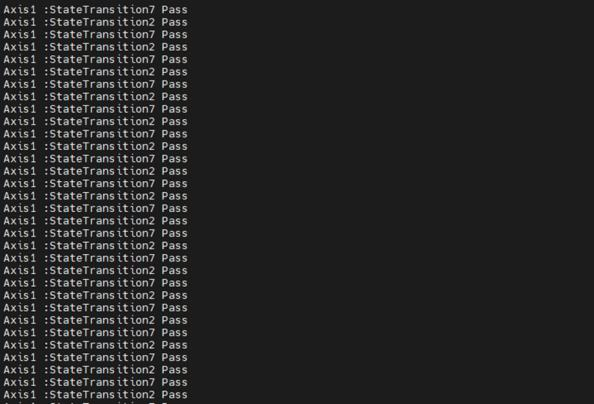
当系统上电后,驱动器自动完成初始化,然后进入STATE_SWITCH_ON_DISABLED状态,此时可以对驱 动器的工作状态模式进行设置,比如说设置为csp或csv模式等等;同时对应在开发板端能看到当前轴1对 应的CiA402状态机信息在不断打印:
csp位置模式控制
先来看下csp模式下的控制器:在位置模式下,我们可以将规划好的目标位置通过写入控制字0x607A设 置目标位置,并且对应状态字0x6064可以得到实际反馈的位置信息。
而如果想要在csp或csv模式下操作,必须先将其状态修改为STATE_OPERATION_ENABLED (可操作模 式)。
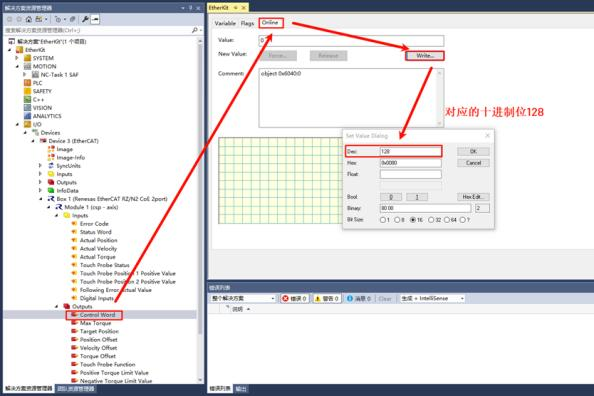
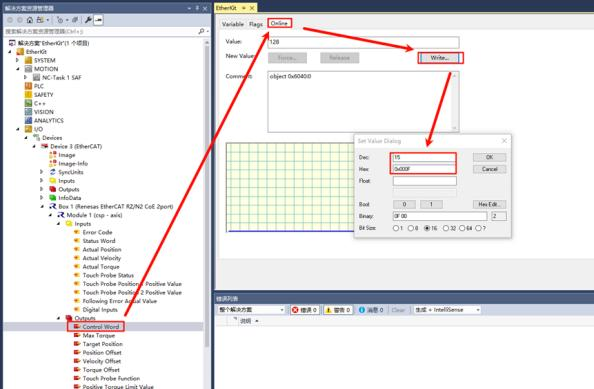
展开左侧导航栏,依次点击Box 1(Renesas EtherCAT RZ/N2 CoE 2port)->Module 1(csp - axis)-
>Outputs->Control Word,首先需要将状态切换为伺服无故障模式,主站通过向控制字0x6040写入值 0x0080(dec:128),将伺服控制器转变为无障碍状态:
此时可以看到从站串口终端会停止State Transition2、State Transition7的打印,接着我们再次向控制 字0x6040写入值0x000F(dec:15):
此时伺服控制器由等待打开伺服使能切换到伺服运行的状态,同时在从站串口中断打印
StateTransition2、State Transition3、State Transition4,在经过状态传输2 3 4后, CiA402状态机进 入STATE_OPERATION_ENABLED ,此时就可以对控制器进行控制了。
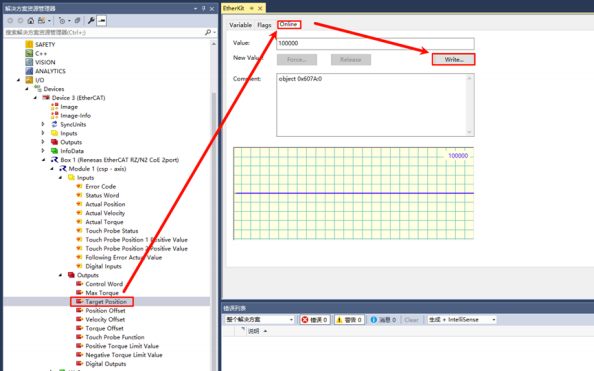
比如说当前是位置模式,通过向Index:0x607A写入位置数值,我们写入100000:
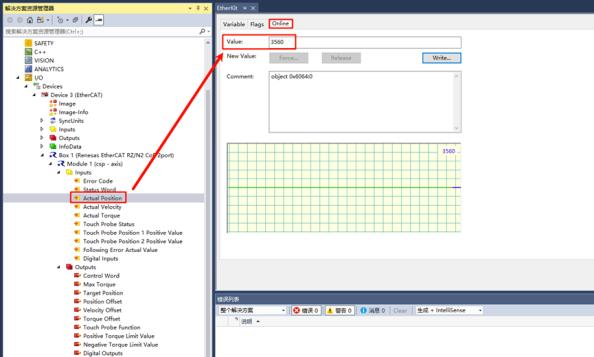
此时依次点击Box 1(Renesas EtherCAT RZ/N2 CoE 2port)->Module 1(csp - axis)->Inputs->Actual Position,查看实际反馈的位置,会发现Index 0x6064对应的value会不断自增,直到100000停止:
csv速度模式控制
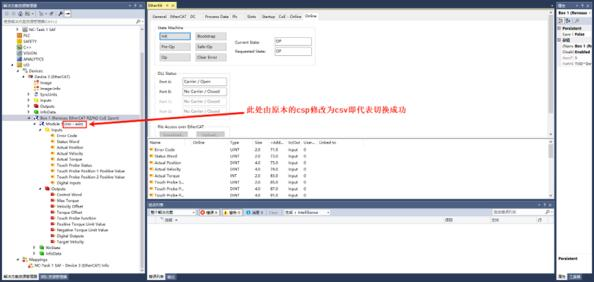
首先需要将控制器模式由默认的csp切换为csv模式,点击左侧导航栏中的Box 1(Renesas EtherCAT
RZ/N2 CoE 2port),接着在中间的页面中找到上方的Slots选择Axis 0,在右边预设支持的module修改为 csv ,并点击‘<’标志:
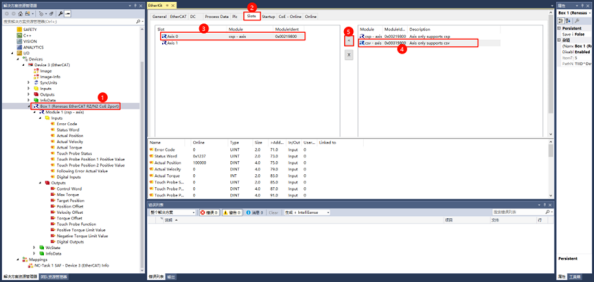
同时我们也可以观察左侧对应的模块信息是否更新,并切换为csv模式:
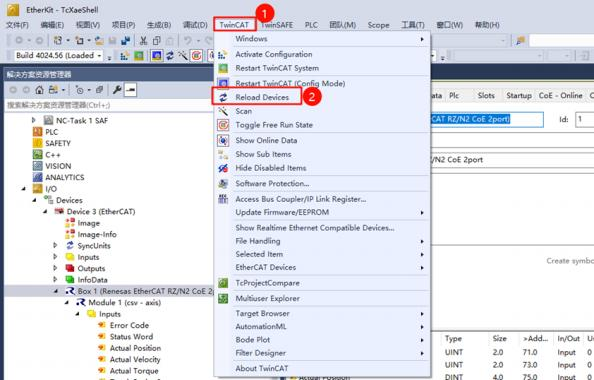
切换好模式后,我们需要重新加载设备,点击TwinCAT3上方导航栏的TwinCAT->Reload Devices:
然后需要使控制器进入STATE_OPERATION_ENABLED (可操作模式,参考上文),同样是对控制字依 次写入0x0080(转变为无障碍状态)、 0x000F (由等待打开伺服使能切换到伺服运行状态)。
此时我们查看输入的状态字0x6041,如果对应的value值为0x1237,那么就代表当前处于可操作模式 (STATE_OPERATION_ENABLED);如果显示的值为0x1208,那么代表当前status处于Fault,重新设置 control word为0x0080( dec:128),并且在重复上述操作即可。
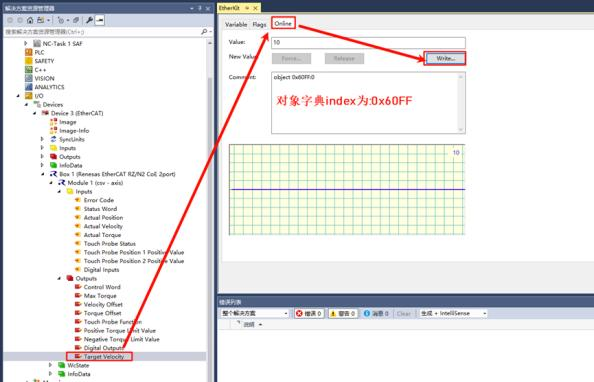
此时我们便可对Target Velocity值进行写入实际想要控制的速度值:
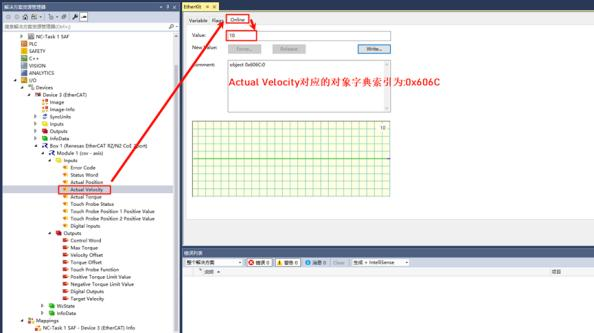
同时可在输入中查看实际设置的速度信息是否一致:
采购链接

或购买链接:https://item.taobao.com/item.htm?ft=t&id=855679103445


想要在RT-Thread平台或社区投放内容?或想参与相关直播活动及赛事?RT-Thread已开放对接窗口,请通过邮件与我们取得联系,期待合作!
