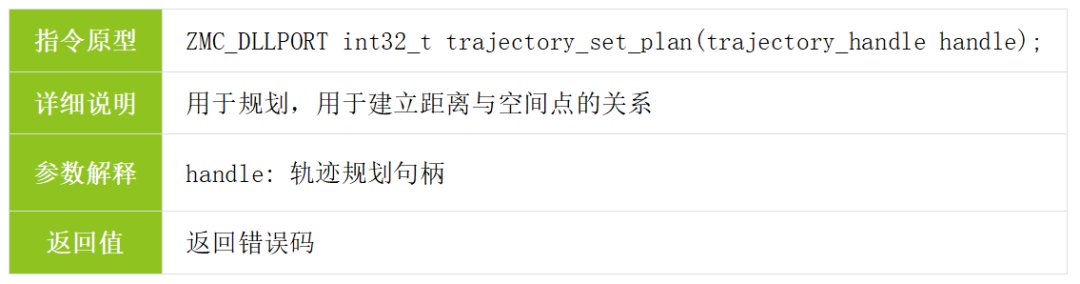
 插补的概念 直线插补
插补的概念 直线插补 圆弧插补
圆弧插补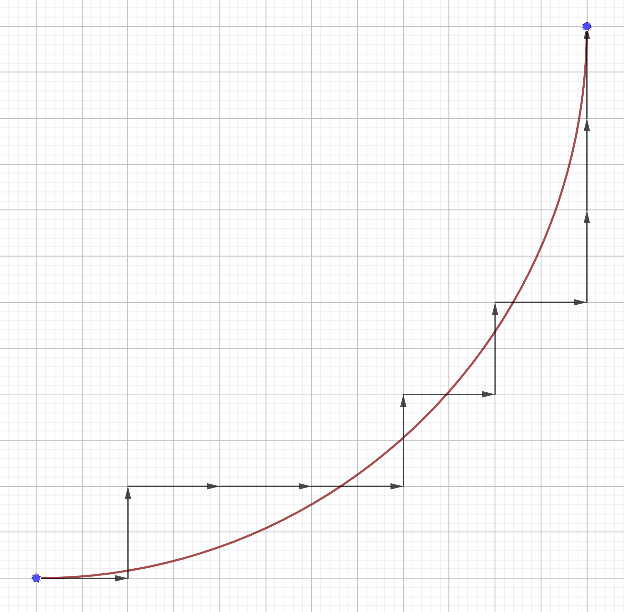
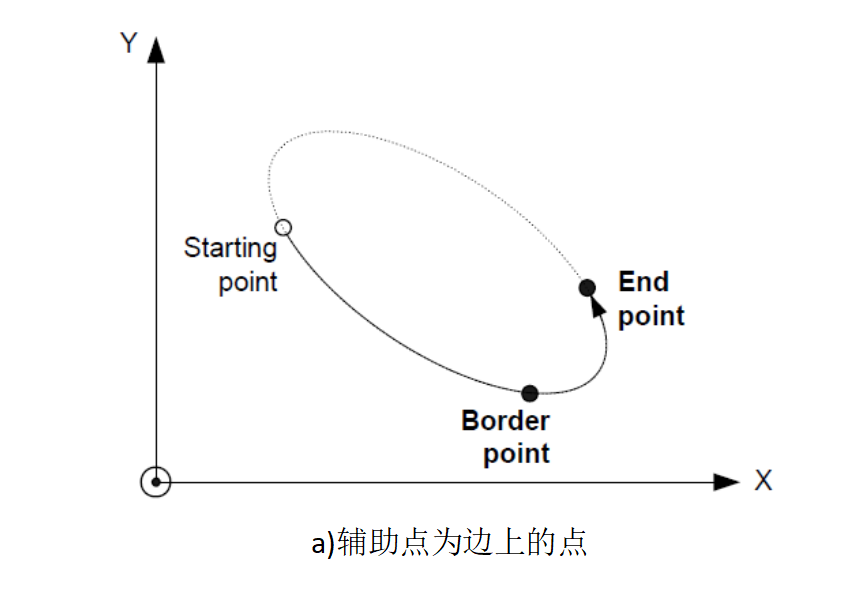
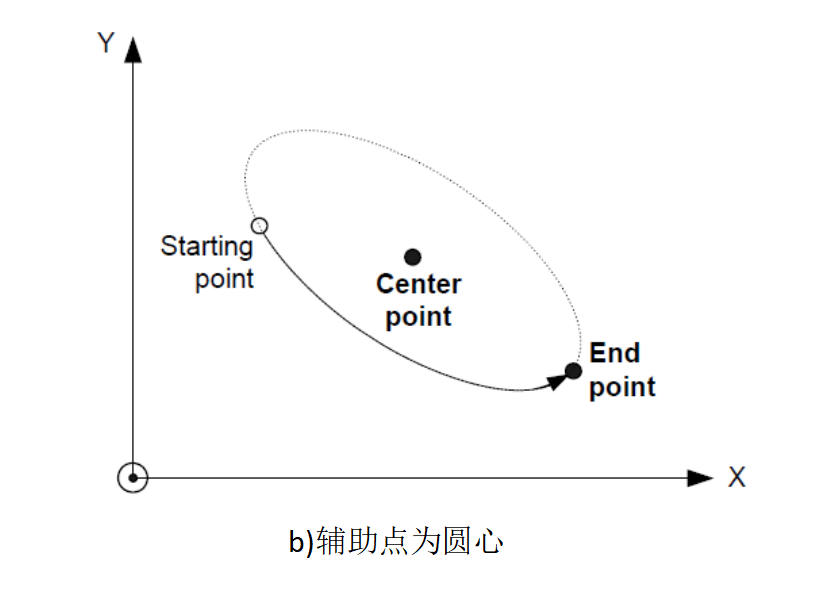
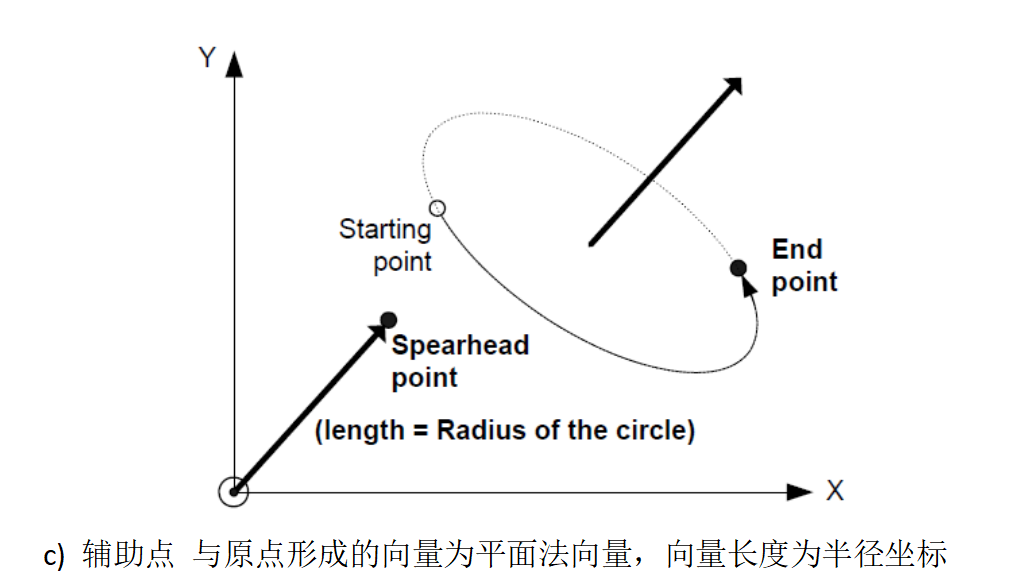
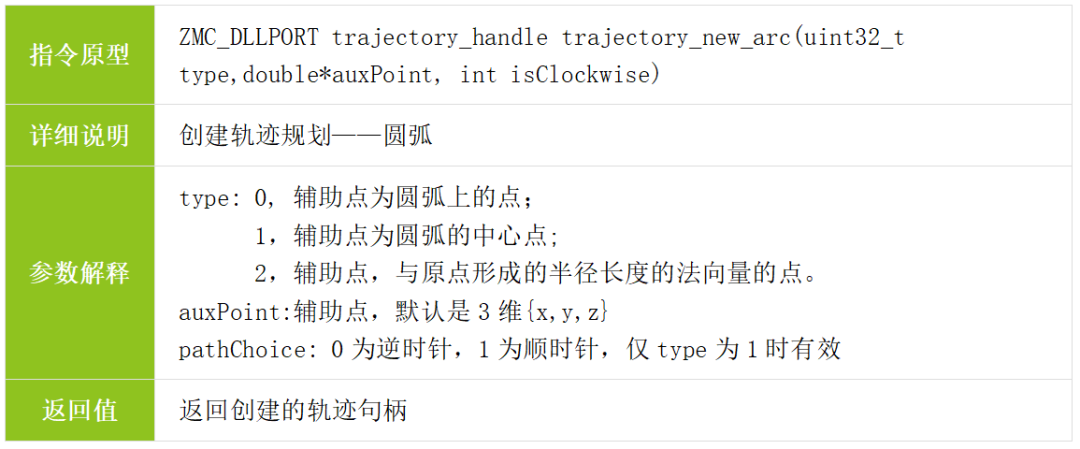
空间圆弧默认为三维,构造圆弧时,方向逆时针为正、除起始点和终点外,辅助参数输入分为三种:
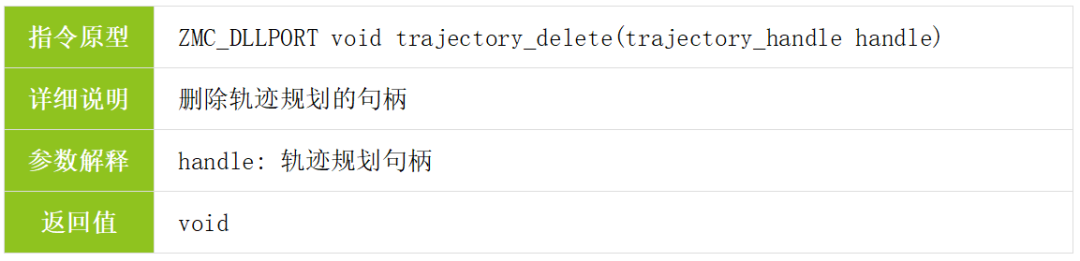
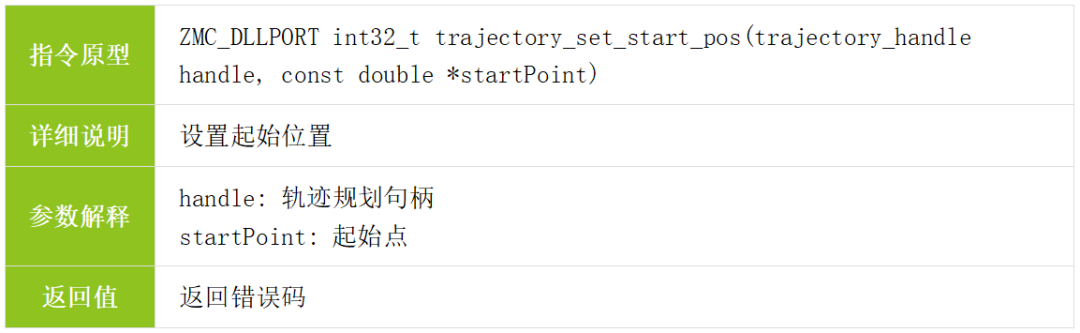
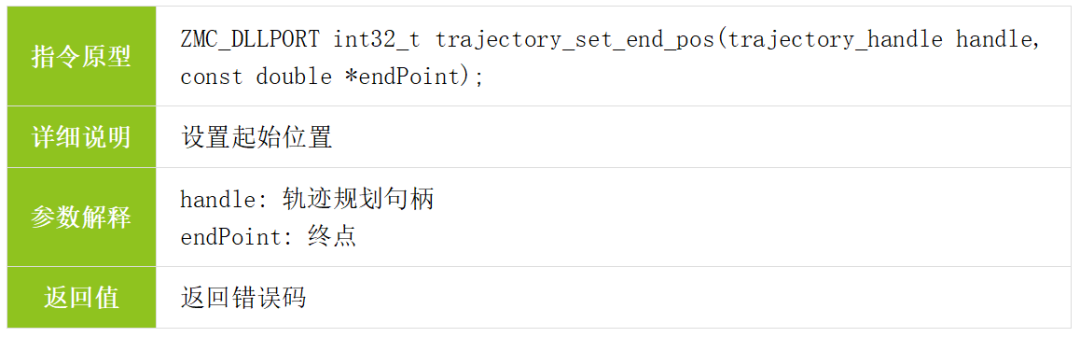
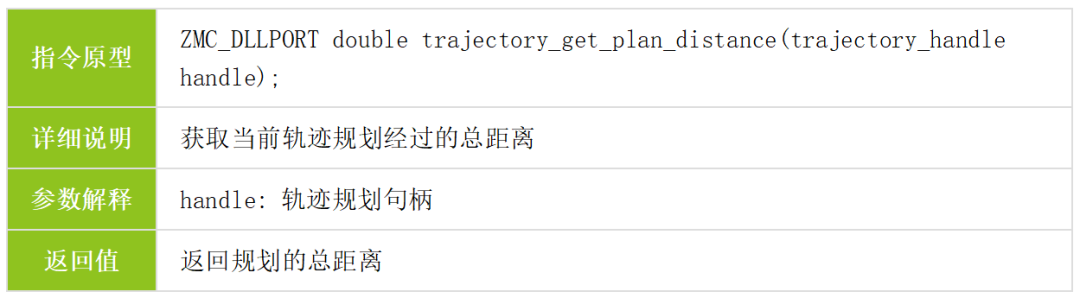
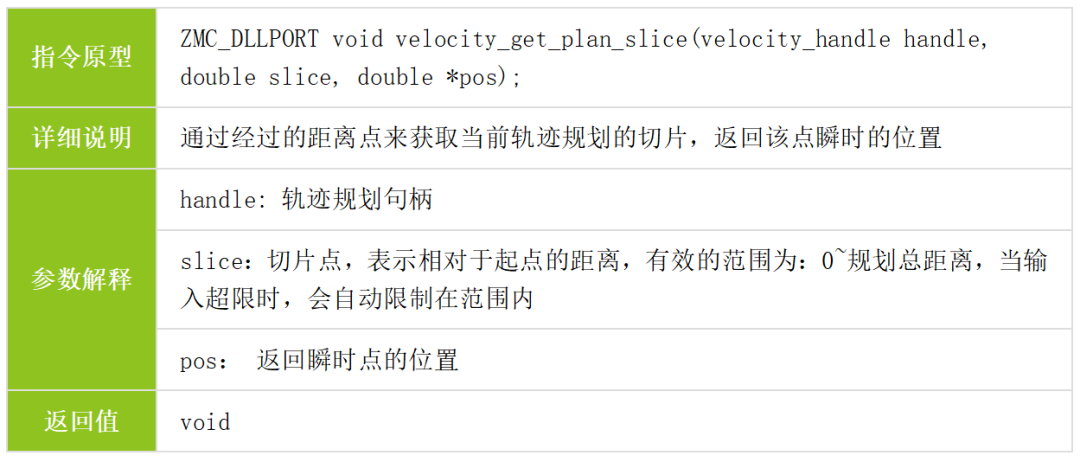
插补算法API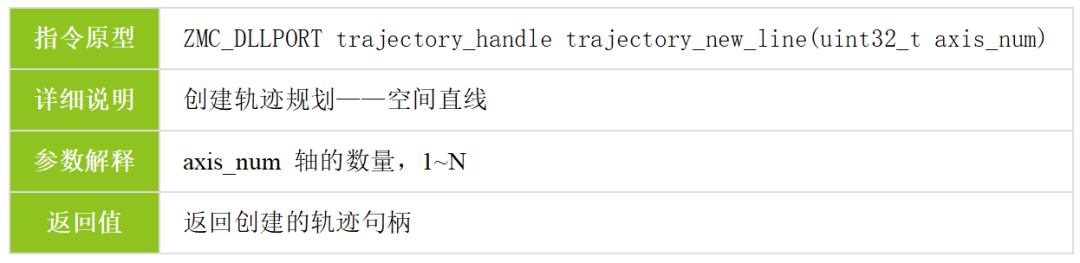
 示例
示例int main(){double startPos[3] = { 0, 10, 20 };double endPos[3] = { 10, 0, -20 };trajectory_handle handle = trajectory_new_line(3);trajectory_set_start_pos(handle, startPos);trajectory_set_end_pos(handle, endPos);trajectory_set_plan(handle);double dist = trajectory_get_plan_distance(handle);for(double d = 0; d <= dist; d+=0.1){double pass_dist[3];trajectory_get_plan_slice(handle, d, pass_dist);std::cout << "pass_dist :" << pass_dist[0] << "," << pass_dist[1] << "," << pass_dist[2] << endl;}trajectory_delete(handle);return 0;}
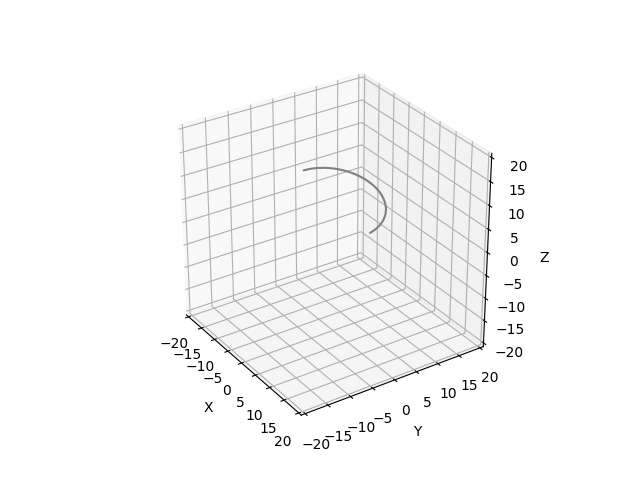
2. 圆弧插补示例:起始点 { -10,0,10 },终点 { 10, 0, 5 }, 经过圆弧点 {0, 10, 7.5}
int main(){double startPt[3]= { -10, 0, 10 };double auxPt[3] = { 0, 10, 7.5 };double endPt[3] = { 10, 0, 5 };trajectory_handle handle = trajectory_new_arc(0, auxPt, 0);trajectory_set_start_pos(handle, startPt);trajectory_set_end_pos(handle, endPt);trajectory_set_plan(handle);double dist = trajectory_get_plan_distance(handle);for (double d = 0; d <= dist; d+=0.1){double pass_dist[3];trajectory_get_plan_slice(handle, d, pass_dist);std::cout << "pass_dist :" << pass_dist[0] << "," << pass_dist[1] << "," << pass_dist[2] << endl;}trajectory_delete(handle);return 0;}
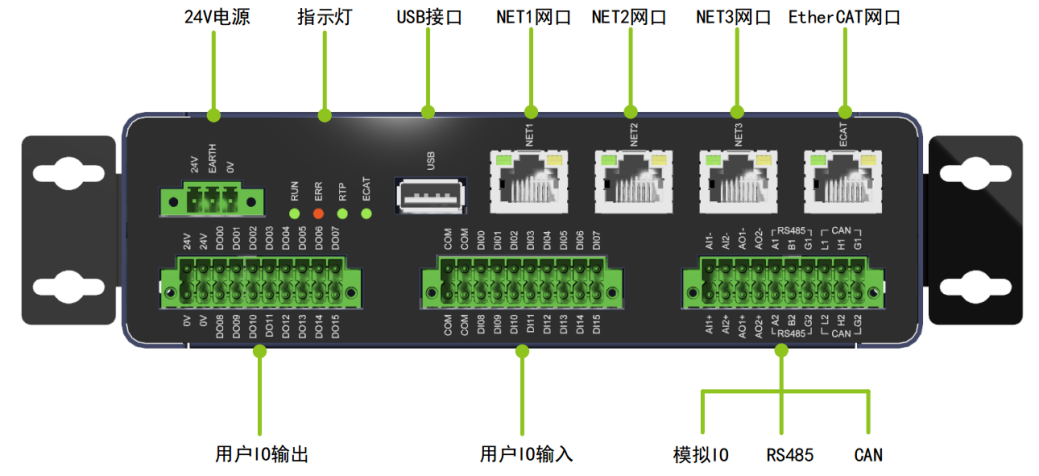
ZMC600E运动控制器 配备了直线和圆弧插补算法,这些算法能够灵活应对各种应用需求,确保轨迹的精确性。掌握这些运动插补技术,有助于提高设备的控制精度和工作效率,为工业生产带来显著的效益提升。