

电控系统并不仅限于新能源电动汽车,传统燃油车同样配备。但相对而言,新能源电动汽车的电控系统更为复杂和强大。
电动汽车(EV)与传统内燃机汽车(ICEV)虽然有着完全不同的动力总成部件,但从Powertrain(动力系统)架构上来看依然可以分为储能单元和驱动单元两部分。EV采用动力电池系统取代了油箱来储能,因此增加了电池管理系统(BMS)。同时EV采用了电机取代内燃机来驱动车辆,因此电机控制器(MCU)代替了发动机控制单元(ECU)。那么为什么EV还需要比ICEV多增加一个整车控制器VCU(Vehicle Control Unit )呢?因此本文主要讨论一下VCU在电动汽车中的作用。
图源:网络
整车控制器(简称VCU)是整车控制的核心控制器,通过CAN/LIN总线或者硬线,实现对电池系统、电驱系统、热管理系统等的管理,具体包括档位、加速踏板、制动踏板的控制,根据实时的动力电池电量,计算出需要输出的扭矩控制,整车的低压、高压的上下电、能量回收等控制。
组成与原理
主要分为集中式控制和分布式控制两种方案:
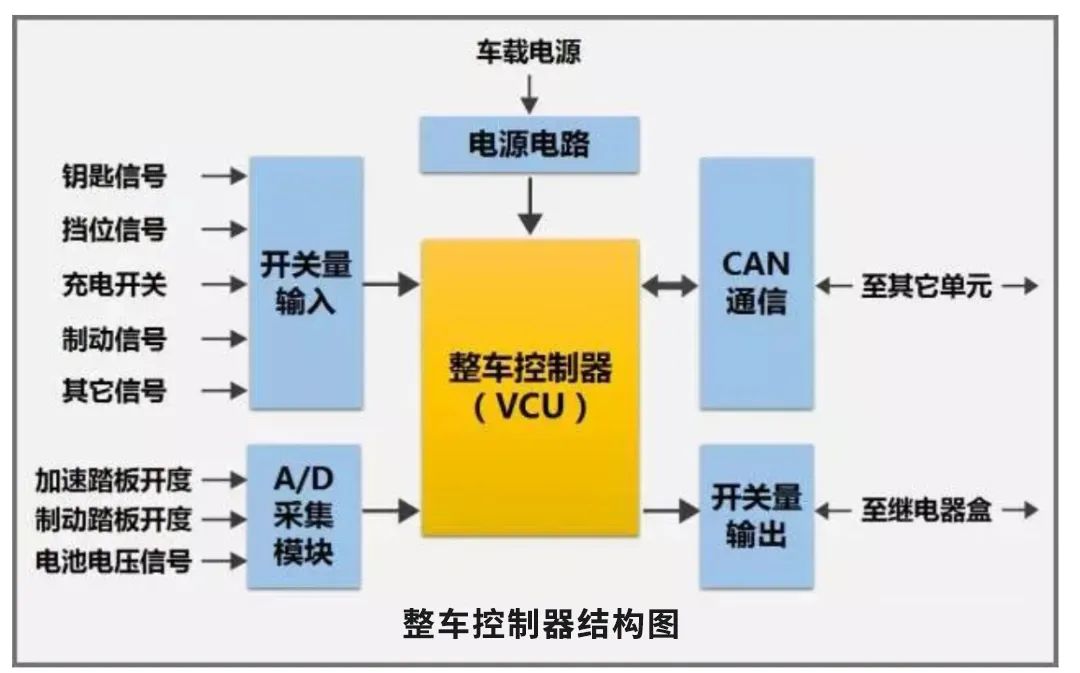
集中式控制系统的基本思想是整车控制器独自完成对输入信号的采集,并根据控制策略对数据进行分析和处理,然后直接对各执行机构发出控制指令,驱动纯电动汽车的正常行驶。
图源:线束中国
集中式控制系统的优点是处理集中、响应快和成本低;缺点是电路复杂,并且不易散热。
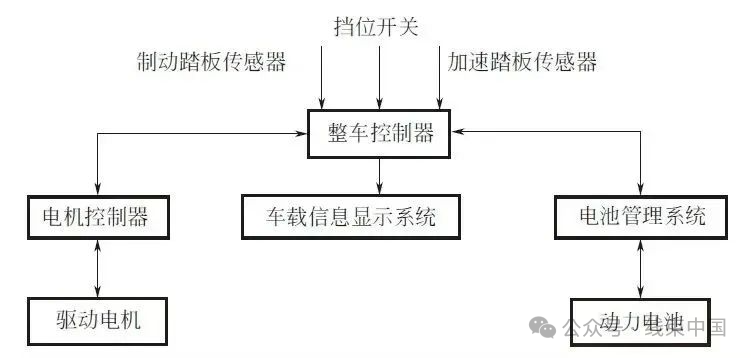
分布式控制系统的基本思想是整车控制器采集一些驾驶员信号,同时通过CAN总线与电机控制器和电池管理系统通信,电机控制器和电池管理系统分别将各自采集的整车信号通过CAN总线传递给整车控制器。整车控制器根据整车信息,并结合控制策略对数据进行分析和处理,电机控制器和电池管理系统收到控制指令后,根据电机和电池当前的状态信息,控制电机运转和电池放电。
分布式控制系统的优点是模块化和复杂度低;缺点是成本相对较高。
主要功能清单及软件架构图
1.车辆控制:采集遥控器、自动驾驶域控制器、云平台指令,控制驱动电机、转向电机、制动电机运动;
2.运动控制:线性制动力度,溜坡保护,四驱车前后转向独立开放,全角度自动差速补偿控制,四驱前后驱动独立开放控制;
3.智能化辅助驱动:仪表、车灯、语音等;
4.电池及能量管理:监控电池信息,进行车辆的制动能量回馈控制;
5.网络管理:监控通信网络,信息调度,信息汇总,网关;
6.在线配置和维护:通过标准CAN端口,进行控制参数修改,匹配标定,功能配置,监控,基于标准接口的调试能力等;
7.故障诊断处理:诊断传感器、执行器和系统其他部件故障并进行相应的故障处理,按照标准格式存储故障码;
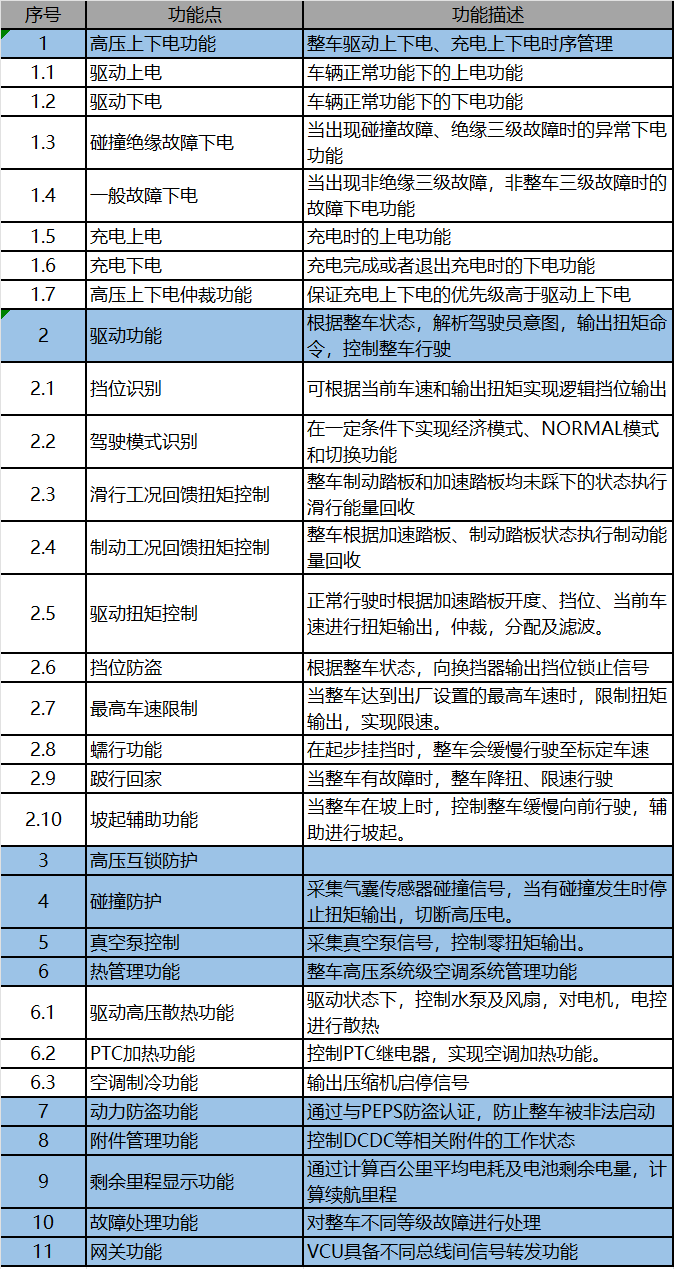
完整的VCU功能清单如下:
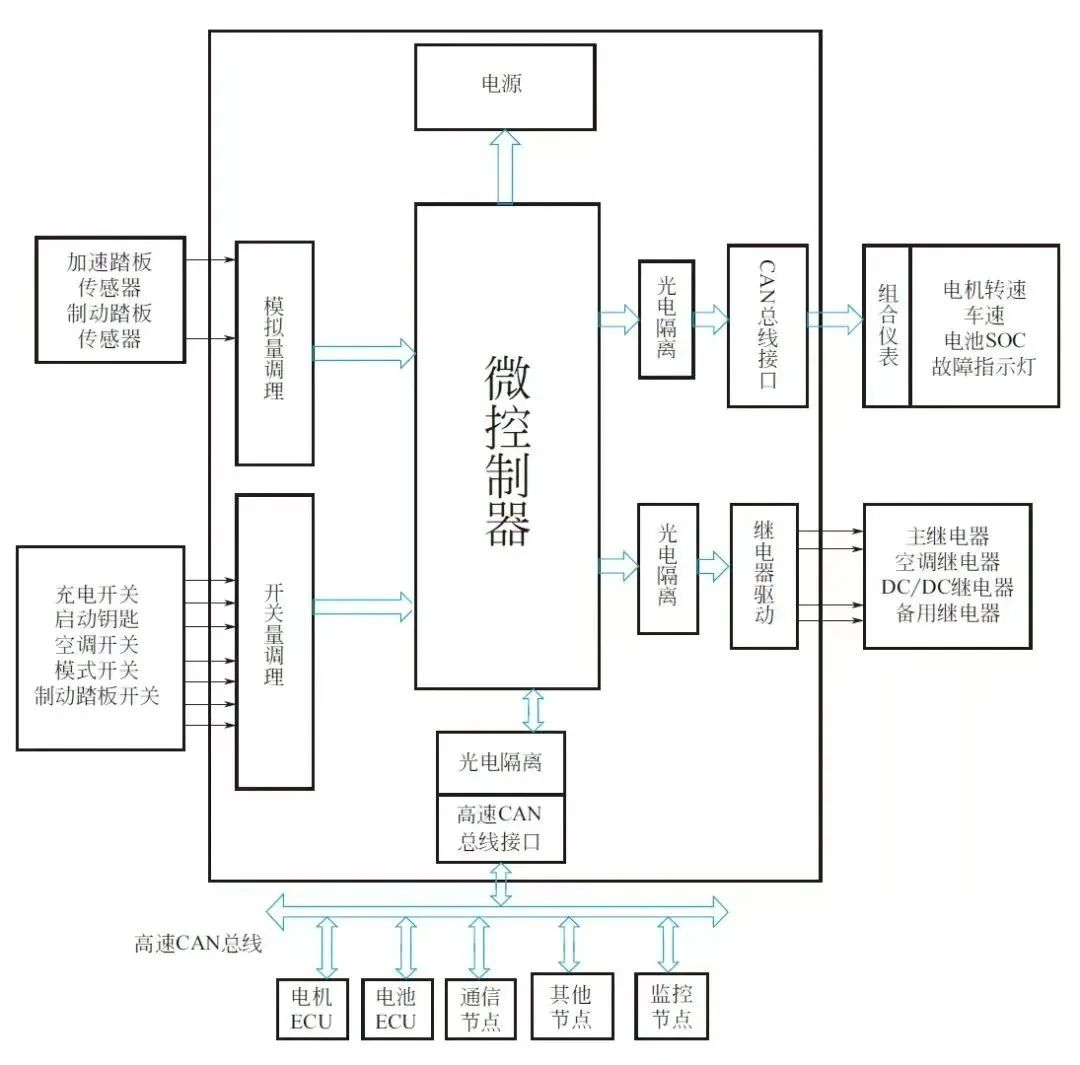
VCU软件架构图如下:

图片来自知乎,Daijun211
VCU发展趋势
在当前电子电气架构变革之际,VCU也将朝着集成化和域控化发展。
集成化是指将整车控制系统中的部分控制功能集成到一个控制器中,例如比亚迪E3.0平台中的八合一,其就是将原来分开的VCU、电机控制器、BMS、车载充电器集成到一个控制器中,如图7所示。
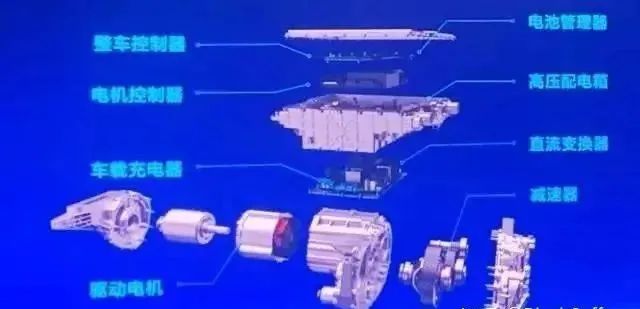
图7 比亚迪E3.0平台的八合一
域控化是在集成化的基础上将VCU升级为动力域的域控制平台,更高性能的芯片将使其支持整车实现SOA服务架构,另外可以尝试更复杂的模型预测控制算法,让VCU对需求扭矩、能量分配和管理做更好,更加精准的控制和分配,从而达到整车电耗的优化,提升电车的续航里程。
扫描二维码|关注我们 ● 电动车千人会 ● | 扫码关注智能汽车 ● EVH1000智能汽车 ● |
欢迎加入新能源汽车产业交流群
关注公众号后台回复关键词“社群”
即可获取入群方式
【免责声明】文章为作者独立观点,不代表电动车千人会立场。如因作品内容、版权等存在问题,请于本文刊发30日内联系电动车千人会进行删除或洽谈版权使用事宜


