点击上方蓝字谈思实验室
获取更多汽车网络安全资讯

在智能座舱的发展历程中,显示屏的个数越来越多,分辨率和显示屏的尺寸也越来越大。这已经是不可逆转的趋势。传统的座舱显示屏需要一颗主芯片支持一块屏幕,这在功能上和成本上都不是很好的做法。最新的智能座舱解决方案中,一芯多屏是必须要支持的功能,区别在于采用什么样的技术途径。本章节将主要讲述智能座舱中显示子系统的硬件相关技术。如下图所示,智能座舱内部所需要支持的显示屏包含这些:
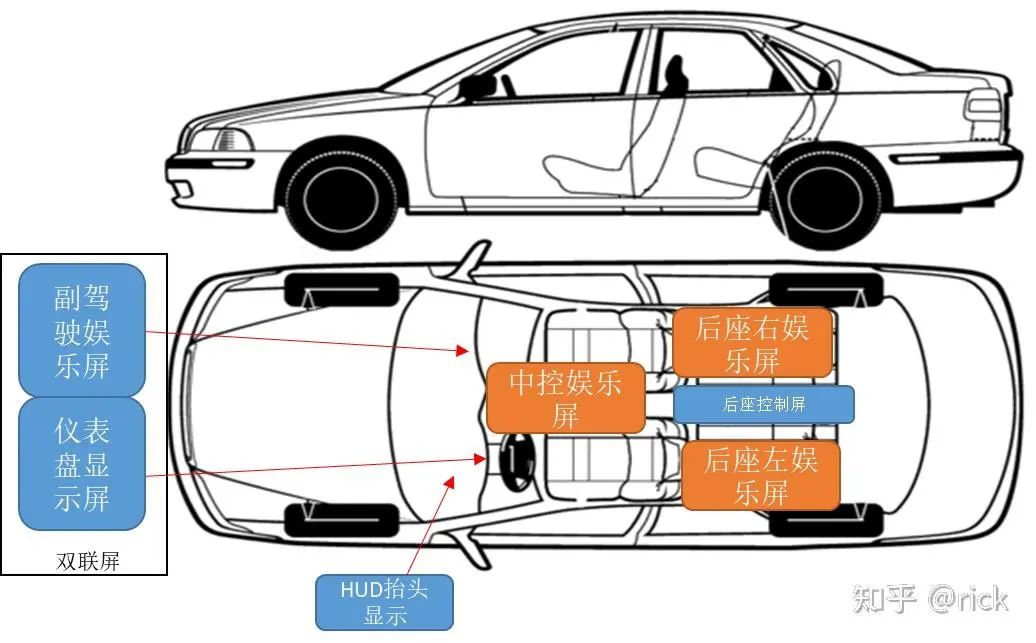
· 仪表屏和副驾屏

· 中控娱乐屏

· HUD

· 后排娱乐屏

· 后排控制屏

根据最新智能座舱发展的趋势来看,车载显示屏硬件技术需要支持一芯多屏。使用一颗CDC座舱芯片,要尽可能地满足如上所述多个显示屏的显示要求。这样一来,可以尽可能地节省成本和功耗。将原来需要多颗芯片才能支持的屏幕功能,尽量集成到一颗高性能的SOC芯片上来,是当前智能座舱发展的客观需求。
一种符合智能座舱CDC一芯多屏需求的车载显示屏的基本架构如下图所示:
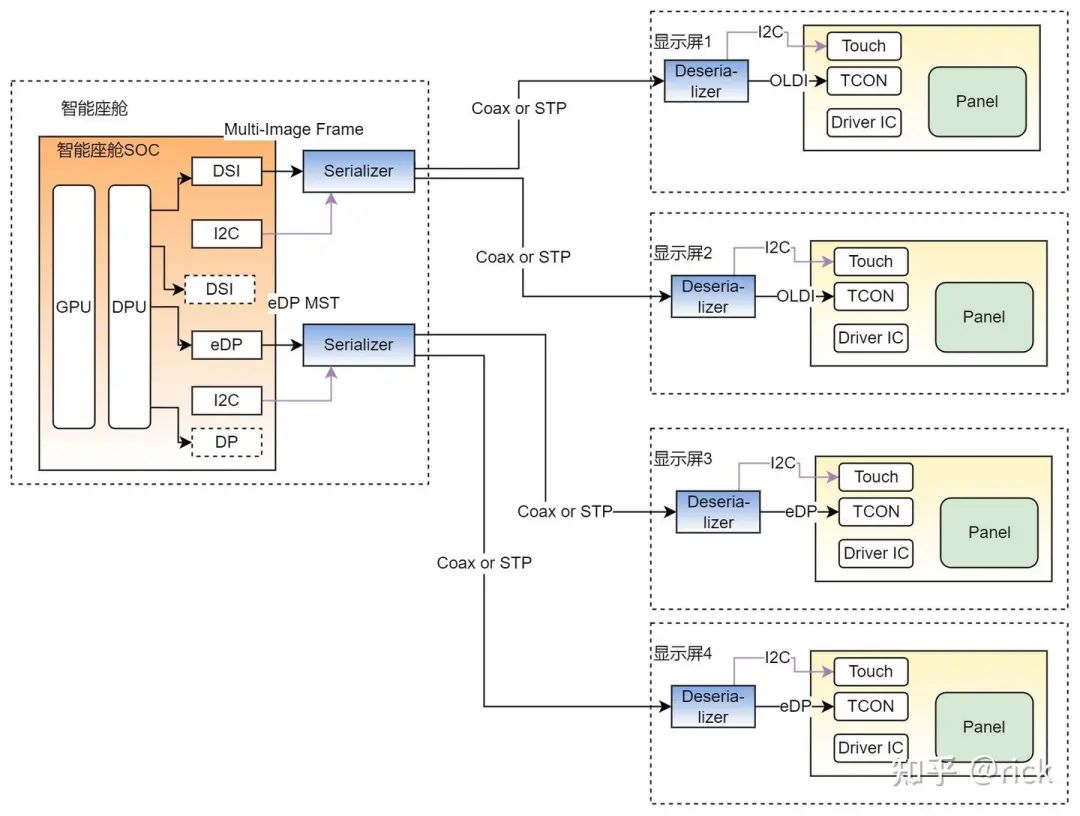
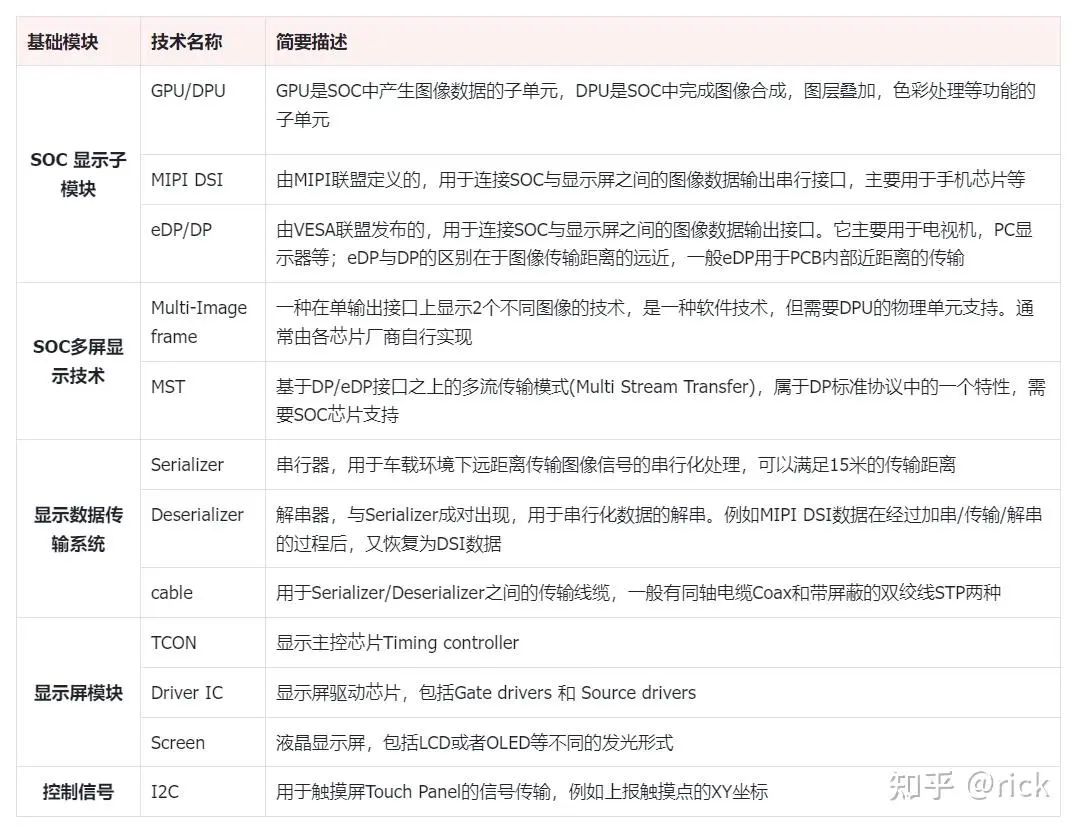
根据上图所示,可以看到,智能座舱CDC的显示子系统包括如下技术:
本节将简要介绍显示屏的基本原理。
显示屏控制系统主要包含2大类芯片,一个是负责驱动显示屏,实现行列显示的驱动芯片,称为DriverIC。另一个是负责控制DriverIC的任务分发和控制芯片,称为TCON(时序控制)。
显示驱动芯片DriverIC,是显示屏成像系统的重要组成部分,其主要工作是驱动显示屏的像素点实现点亮或者关闭,并控制光线强度和色彩等。
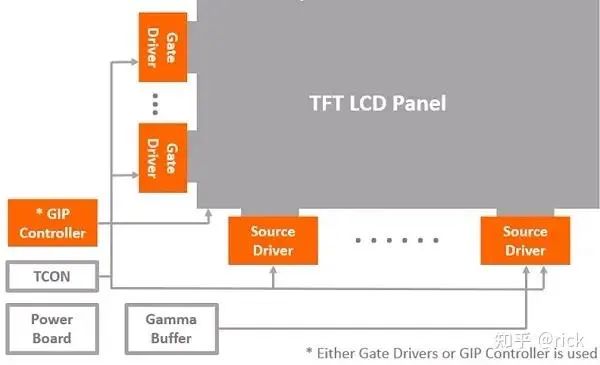
显示驱动芯片分为源驱动器(Source Driver)和门驱动器(Gate Driver)。Gate Driver:连接至晶体管Gate端,负责每一行晶体管的开关,扫描时一次打开一整行的晶体管;所以也称为Row drivers。Source Driver:连接到晶体管的source端。当一行晶体管被Gate driver打开(ON)时,Source Driver IC才能够将控制亮度、灰阶、色彩的控制电压加载到这一行的每个像素点上。因此,Source Driver也称为Column Driver。
DriverIC在显示屏中的结构可以参见下图所示:
时序控制芯片TCON(Timing Controller) 是显示屏模组的主控芯片。它主要负责分析从CDC SOC传来的信号,并拆解、转化为Driver IC可以理解的信号,再分配给Source/Gate driver去执行。
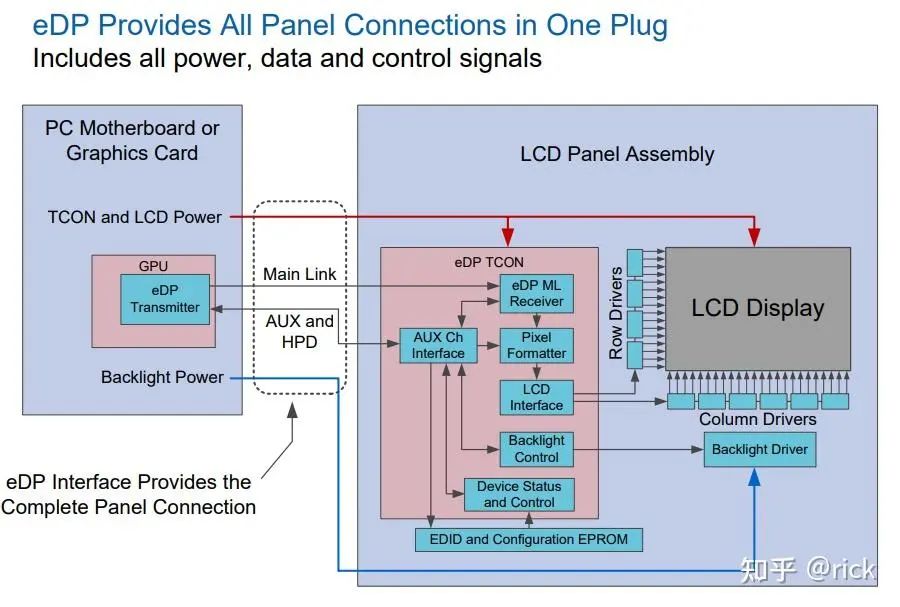
下图是一个典型的eDP TCON接口系统。SOC通过eDP通道,将显示数据传送到eDP TCON芯片中。
TCON有2个主要功能:
1.接收来自SOC的eDP信号;
2.产生行(送给row drivers)和列(送给column drivers) 显示信号,并按规定好的时序发送到Row/Column Driver IC上;
在T-CON与Gate/Source之间的信号传输以前是以LVDS为主,现在比较流行的则是LVDS的升级版,主要是mini-LVDS(by德州仪器)和RSDS(ReducedSwing Differential Signaling by国家半导体)。这两种规格现在也渐渐落后了,取而代之的是Advanced PPmL(Point to Point mini LVDS)以及V-by-One HS的配套标准CalDriCon。所以在T-CON处需要有一个输出mini-LVDS/RSDS/CalDriCon/Advanced PPmL信号的Transmitter,而在Source/Gate IC那里则需要有相应的Receiver。
当收到信号后,Row Drivers逐行打开晶体管;而Column Drivers则将不同级别的电压加在这一行的每一列像素点上,从而实现像素点的色彩,亮度区别。
TCON芯片实现的难点在于,根据显示屏分辨率和刷新率的不同,需要产生满足时序的行列信号,给到Source/Gate Drivers。分辨率越大,需要显示的像素点就越多;刷新率越高,则要求TCON产生刷新数据的时序越快。并且对Gate/Source Drivers和LCD像素点改变状态的延时要求也越高。当分辨率和刷新率两个结合起来时,要求TCON处理的数据量越来越多,所产生的行列时序信号也就要求越高。
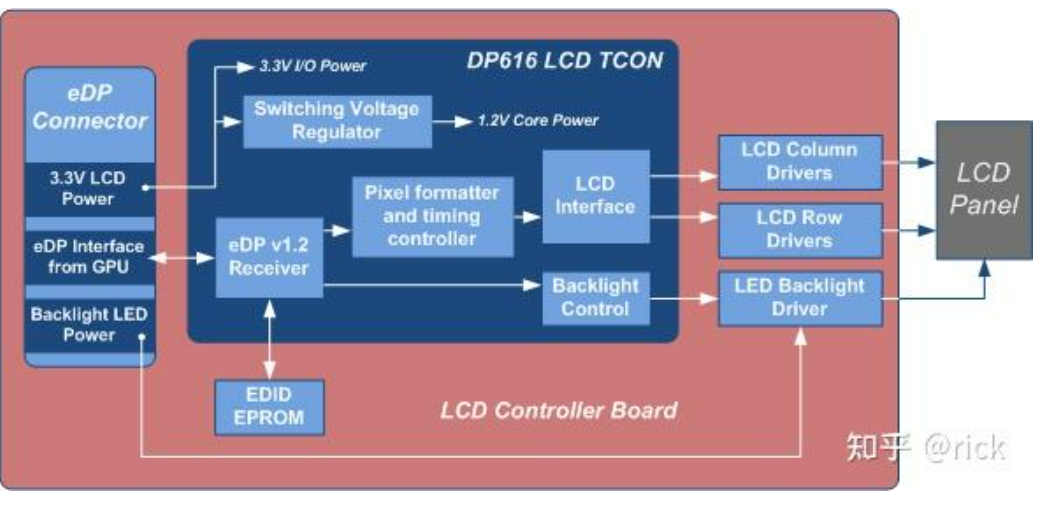
下图是一个eDP接口的LCD显示系统示意图。可以看到来自GPU的显示数据,通过eDP接口传输到LCD屏上的TCON芯片中(如果距离过长需要增加SerDes通道)。eDP ML Receiver将eDP数据送给Pixel Formater模块,产生行(Gate)和列(Source)显示信号。Row / Column Drivers 接收来自LCD Interface的信号(mini-LVDS/RSDS/CalDriCon/Advanced PPmL),并实现LCD屏的显示刷新。
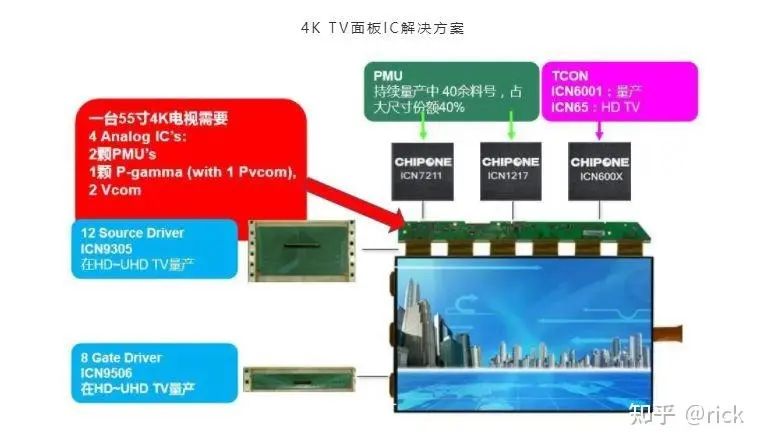
在高清电视或者车载显示屏方案中,每块屏幕都需要一颗TCON芯片。如果屏幕尺寸扩大,则Driver IC的需求数量大幅增加。如下图,分别需要12颗Source Driver和8颗Gate Driver,另外还需要两颗PMU(电源管理芯片)及3颗Vcom(电压校准芯片)
上面说的都是显示器的情况,手机则稍微有点不同。手机因为各种芯片的功能更加集中,CPU/GPU等相当于电脑主机的芯片都集中在了应用处理器AP(ApplicationProcessor),而DDIC也是一个芯片集合了所有的功能。所以信息从AP出来以后以后会直接通过MIPI DSI接口进入DDIC,而DDIC直接就可以控制TFT了,不需要那么多的接口。
以上内容,介绍了显示屏的主要原理,那么接下来就要了解AP与显示屏之间有哪些接口技术。
如果需要将显示数据从SOC主芯片传送到显示屏并完成显示,需要2大类显示接口技术。一种是从CDC SOC到TCON的显示接口,另外一大类则是从TCON到Gates/Sources 。后者主要在显示屏内部,由显示屏厂商实现。前者则需要考虑得更多,因为需要兼容不同的SOC,它们对显示接口技术的选择,影响了TCON的输入标准。
虽然本文主要讨论的是车载显示接口,但这些显示接口技术的历史来源主要是基于2大应用场景:电视机或者个人计算机。因此,我们将首先回顾一下数字视频接口技术的发展,与车载环境相关性不大的将会被省略。
· LVDS:
最早由National Semiconductor(国家半导体公司,后被德州仪器收购)提出,基于LVDS(Low-Voltage Differential Signaling 低压差分信号)技术,将并行的数字视频信号转为串行传输。它的每一对LVDS差分信号线传输的是7bit数据。如果要传输RGB666,需要使用4对LVDS差分线。基于LVDS技术的传输接口标准主要有OpenLDI,FPD-Link,DP(Display Port)/eDP等;
· TMDS:
最早由Silicon Image(现在已经被Lattice Semiconductor收购)所研发的技术解决方案,称为TMDS (Transition-Minimized Differential Signaling)。这个技术和LVDS在物理层面上有些相像,但是在通信协议上则完全不同,它采用了IBM的8b/10b的编码方式,可以减少信息的错误的产生并支持更长的线缆长度。在传输RGB888 的图像信号时,它首先将一路8bit并行信号(R/G/B分量分别为8/8/8bit)串行化为10bit输出,然后在接收端再解串,将10bit转换为8bit。
TMDS前8位数据经过编码后,第9位接编码方式,第10位作用是DC均衡。
一条TMDS信号通道传输8位数据,传输R'G'B'数据需要三条TMDS信号通道,另外还需要一条时钟通道。每一个通道其实也是一对差分信号线。
基于TMDS的传输接口标准主要有DVI,HDMI,DFP等。
· MIPI DSI:
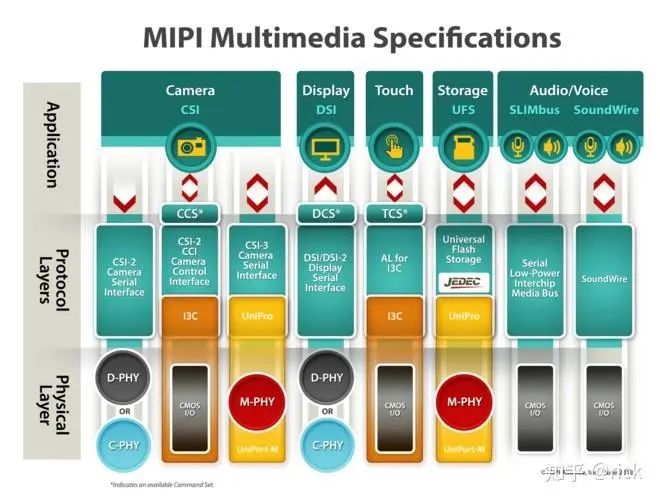
与LVDS或者TMDS不同,MIPI DSI主要用于手机等移动设备的显示屏接口。MIPI的全称是(Mobile Industry Processor Interface Alliance),它是2003年由ARM、英特尔、诺基亚、三星、意法半导体和德州仪器共同创立的一个全球的开放组织,其主要目的就是发展移动生态环境的接口标准。经过十几年的发展,目前在全球已经有250多个会员公司,而且随着移动生态的发展,MIPI制定的标准已经进入到了人工智能、物联网、虚拟与增强现实、汽车、照相机、工业电子与医疗设施等等领域。
MIPI将接口的物理标准与其传输协议分开定义。目前MIPI规定了三种物理标准,分别是M-PHY、D-PHY和C-PHY。其中M-PHY传统上是用在当做芯片与芯片之间的高速数据传输,而D-PHY则被用来连接摄像头与主芯片组以及显示屏与主芯片组。后来MIPI又在D-PHY的基础上,发布了同样用途的C-PHY标准,可以算是对D-PHY标准的升级。
MIPI DSI(Display Serial Interface)是一个应用于显示技术的串行接口。它以串行方式向外围设备(实际上是液晶显示器)发送像素信息或指令,并从外围设备读取状态信息或像素信息。在传输过程中,它享有自己独立的通信协议,包括数据包格式和纠错检测机制。
· 总结
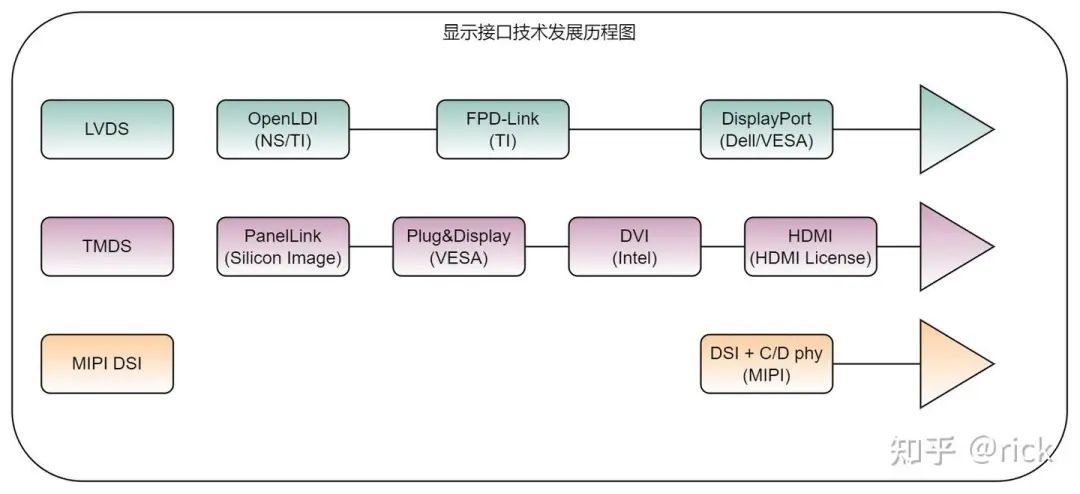
根据上述简要介绍,我们可以总结一下,可以使用在车载环境下的数字视频接口技术溯源如下图所示:
显示系统数字视频接口的规格为:

HDCP:High-bandwidth Digital Content Protection,高带宽数字内容保护。
EDID:Extended Display Identification Data,扩展显示标识数据。
DDC:Display Data Channel,显示数据通道。
DMT:Display Monitor Timing,显示器时序规范。
P&D:Plug and Display,即插即用。
DSC:Display Streaming Compression,显示流压缩技术,可以实现将Display数据进行压缩后再传输,以节省带宽,支持高清视频传输。最高可达3:1的压缩比率。
在讨论视频传输接口时,首先要了解视频数据格式。一般来说,可以有2种方法来表示每个像素的颜色。第一种是每个像素点用3种颜色来表示,分别是Red/Green/Blue,也就是3原色。如果每个颜色采用8个bit(1个字节),则一个像素点需要3*8=24bit的存储空间。第二种是采用YUV分量的方式。YUV是编译true-color颜色空间(color space)的种类,Y'UV, YUV, YCbCr,YPbPr等专有名词都可以称为YUV,彼此有重叠。“Y”表示明亮度(Luminance或Luma),也就是灰阶值,“U”和“V”表示的则是色度(Chrominance或Chroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。YUV的存储空间通常小于RGB格式,并且在容忍一定的数据损失前提下(人眼感知不到),RGB与YUV色彩格式可以相互转换。
· 视频数据格式:
18位单像素R'G'B':使用6位R'G'B'值,R5~R0,G5~G0,B5~B0。
24位单像素R'G'B':使用8位R'G'B'值,R7~R0,G7~G0,B7~B0。
18位双像素R'G'B':将两个像素表示为3个6位R'G'B'值高位/低位对;RU5~RU0,GU5~GU0,BL5~BL0,RL5~RL0,GL5~GL0,BL5~BL0。每个高位/低位对表示两个像素。
24位双像素R'G'B':将两个像素表示为3个8位R'G'B'值高位/低位对;RU7~RU0,GU7~GU0,BL7~BL0,RL7~RL0,GL7~GL0,BL7~BL0。每个高位/低位对表示两个像素。
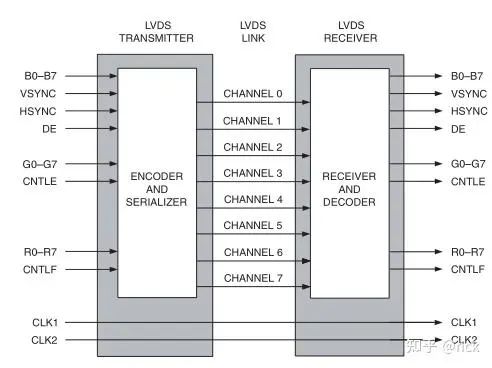
· OLDI传输
OpenLDI,LVDS链使用了8对串行数据线(A0~A7)和两个采样时钟线(CLK1和CLK2)。实际使用的串行数据线依赖于像素格式,串行数据率为7倍采样时钟频率。CLK2信号在双像素模式下用于与FDP链(一种高速数字视频接口)接收端后向兼容。
传输18位单像素R'G'B'时,OpenLDI串行线的A0~A2用于传输。
传输24位单像素R'G'B'时,OpenLDI串行线的A0~A3用于传输。
传输18位双像素R'G'B'时,OpenLDI串行线的A0~A2,A4~A6用于传输。
传输24位双像素R'G'B'时,OpenLDI串行线的A0~A7用于传输。
LVDS链支持使用32.5~160 MHz的视频采样率和时序。
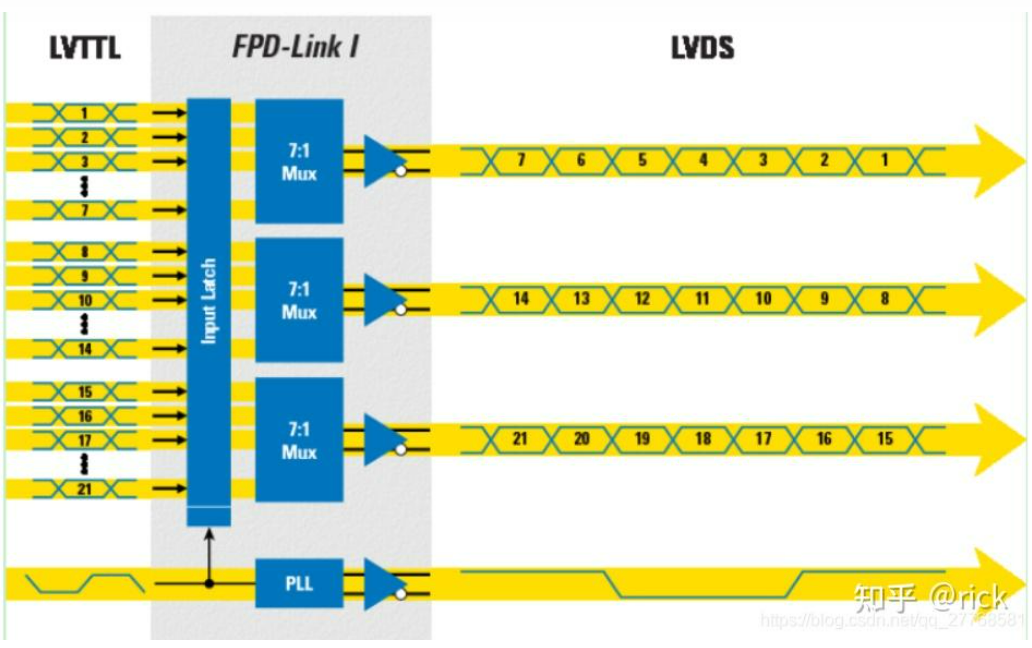
如下图,为OpenLDI的LVDS链示意:
在传输显示数据时,OLDI实际上每一对差分线传输的是7bit的数据,因此一个时钟节拍内,4对差分线可以传输28bit的数据,其中包含24bit数据和3个bit的控制信号。如下图所示,D0+/- ~ D2+/-传输RGB666+DE+VS+HS,D3+/- 传输剩下的6bit RGB。因此3对差分线可以传输18bit RGB666,4对线可以传输RGB888。
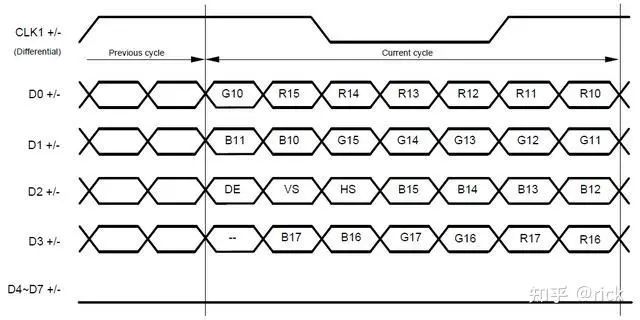
在实际使用中时,TI的FPD-link可以支持将远距离传输的视频数据,在解串器端进行反串行化,输出RGB格式的数据。然后通过OLDI接口传送给显示屏。此时显示屏的TCON芯片同样采用OLDI接口输入数据。
HDMI是基于TMDS技术发展而来的,它与LVDS在物理层上有些类似,同样也是采用差分线对来传输高速数据信号。但是它的编码方式与LVDS不相同,而是基本采用了IBM的8b10b编码方式。
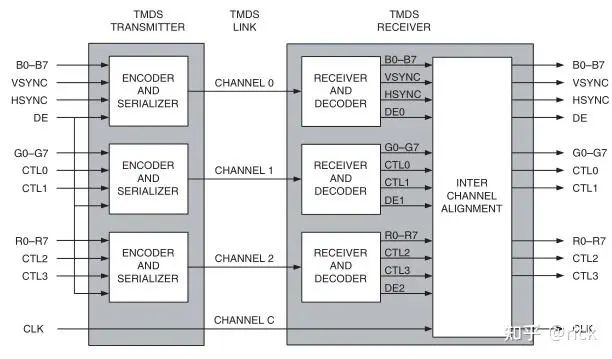
下图说明了HDMI的传输架构:
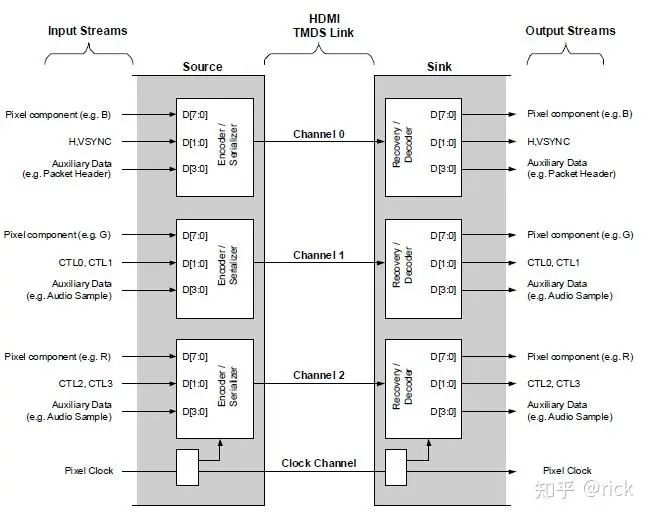
8bit的数据在source经过TMDS encoder后得到10bit数据,经过serializer后串行输出;在sink端先进行复原成10bit的数据,再通过TMDS decoder得到8bit的源数据。
· 数据传输协议
如果传输的是Video Data,并且格式为RGB,那么会占用三个通道的所有24bit输入,Channel0[7:0]用于传输B,Channel1[7:0]用于传输G,Channel2[7:0]用于传输R。
如果传输的是Data Island,则占用三个通道共10bit输入,Channel0[3:2]用于传输Data Island Header(包头),Channel1[0:3]与Channel2[0:3]用于传输Data Island Content(包内数据)。
如果传输的是Preamble,则占用1,2两个通道共4bit输入,Channel1[1:0]与Channel2[1:0]分别为CTL0,CTL1,CTL2,CTL3,用于判断接下来输入的是Video Data或者Data Island
对于Hsync与VSync,会占用Channel0通道的两个bit输入,Channel0[0]为Hsync,Channel0[1]为Vsync

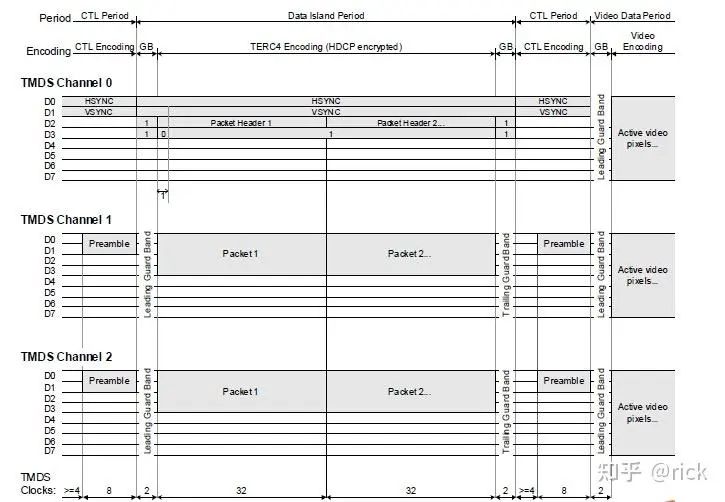
· 传输周期
HDMI的TMDS数据传输可以分为三个传输周期:

1.Control Period期间会传输Hsync,Vsync,并且在该时期的最后阶段会传输Preamble
2.Data Island Period期间会传输Data Island(数据包),也会有Hsync与Vsync
3.Video Data Period期间会传输Video Data(视频像素数据)
某帧的总体周期如下:
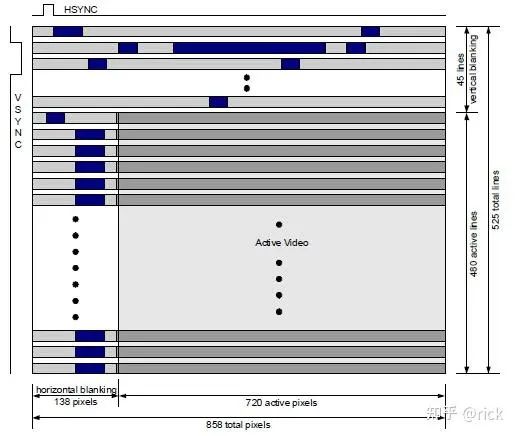
三个传输周期的过渡如下:
· 有效传输带宽
根据上面的描述,HDMI所传输的有效数据,要小于物理层提供的高速传输带宽。除了8b10b编码的损失之外,还有3个传输周期的切换所造成的损失。有效的图像传输带宽为:(720*480) / (858*525) * (8/10) = 345600/450450 * 8/10 = 61.3%;
DisplayPort是由PC及芯片制造商联盟开发,由VESA(视频电子标准协会)所标准化发布的数字视频接口标准。该接口免认证、免授权金,主要用于视频源与显示器等设备的连接,并也支持携带音频、USB和其他形式的数据。
此接口的设计是为取代传统的VGA、DVI和FPD-Link(LVDS)接口。通过主动或被动适配器,该接口可与传统接口(如HDMI和DVI)兼容。
eDP(Embedded DisplayPort) 协议是针对DP(Display Port)应用在嵌入式方向架构和协议的拓展,所以eDP协议完全兼容DP协议。相对于DVI/HDMI来说,eDP具有高带宽、整合性好、相关产品设计简单,该接口已广泛应用于笔记本电脑、平板电脑、手机等其它集成显示面板和图像处理器的领域。
DP的系统架构:

DP由Source端和Sink端组成。其中Source端为图像发送端,一般是GPU等产生图像的设备。Sink端为播放端,一般为显示屏等设备。
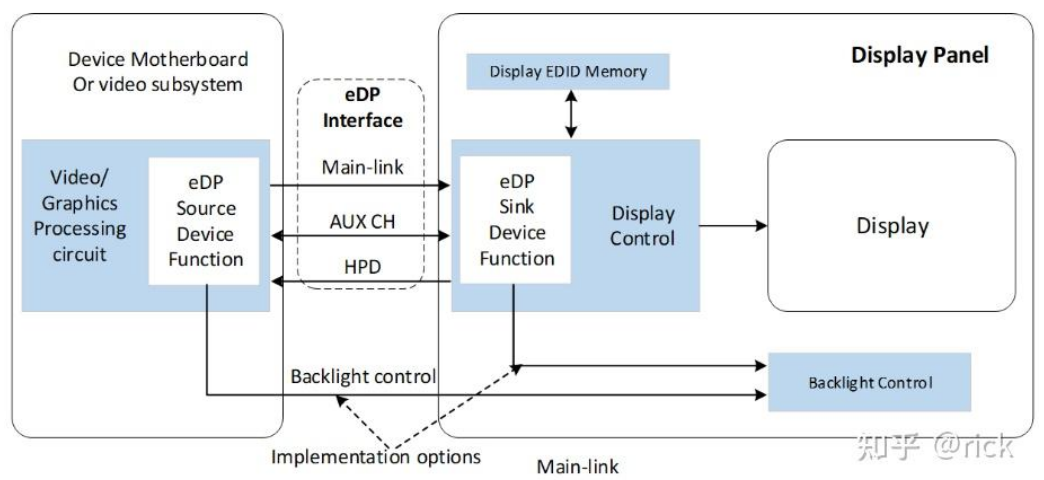
eDP的系统架构:
DP与eDP的区别在于:
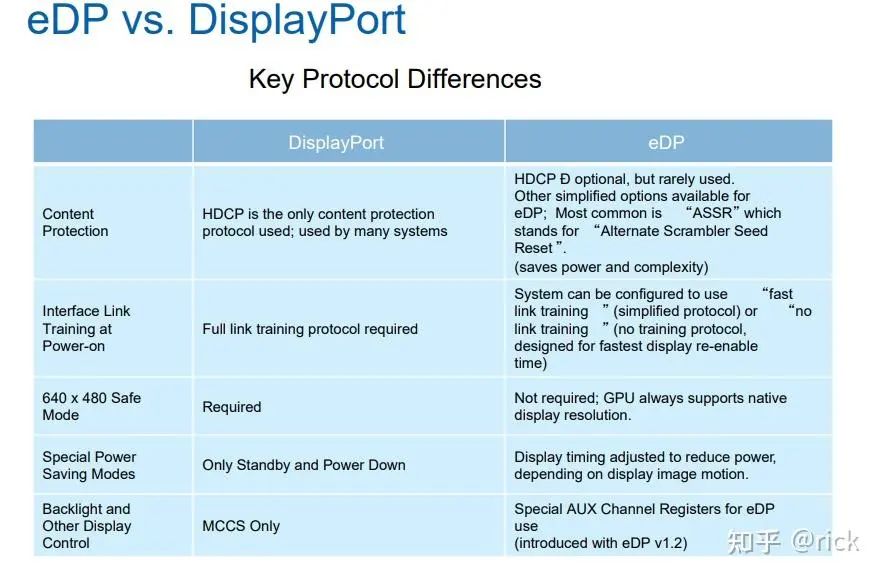
DP与eDP的主要区别,首先是DP可以通过有线线缆进行长距离(>2m)传输,用于设备之间的视频数据传输。而eDP一般用于板级,设备内部的视频数据传输。其次,由于接口外置,DP一般要求具备数字内容保护功能,即HDCP;而对于eDP来说,由于接口不外露,因此HDCP功能是可选的,几乎很少使用。
从系统架构图中可以看出,DP/eDP均需要包含3个主要组件:
1.Main-Link:
主链路是一个单向、高带宽、低延迟的信道,用以传输诸如未压缩的视频和音频的同步数据流。注意Main-Link可以为1 Lane,2 Lane或者4 Lane。其中每一lane是一对差分信号线。
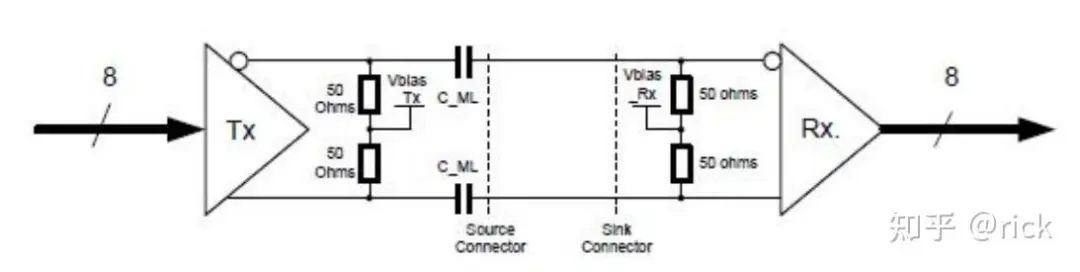
每一条Lane上所传输的数据为8b10b编码,即8bit的数据源在TX端会被encoder,扩展为10bit,其中嵌入了时钟信息。在RX端进行decoder后,恢复为8bit编码的原始数据。因为这样的设计,在长距离的传输中,才能有更好的EMI电磁兼容性设计。同时,在数据Lane的传输中已经自带时钟信息,无需再额外使用一对时钟信号线。
由于Main link的这个特性,因此在每次启动DP传输之前,或者当检测到传输过程中发生错误之后,均需要启动一个Link training的过程。这个training主要是对连接器以及线缆上的信号损失进行补偿,以确保无错误的数据传输。
Training的过程将通过AUX CH来进行,当Source端检测到HPD信号时,认为有sink插入,即会启动DP training。
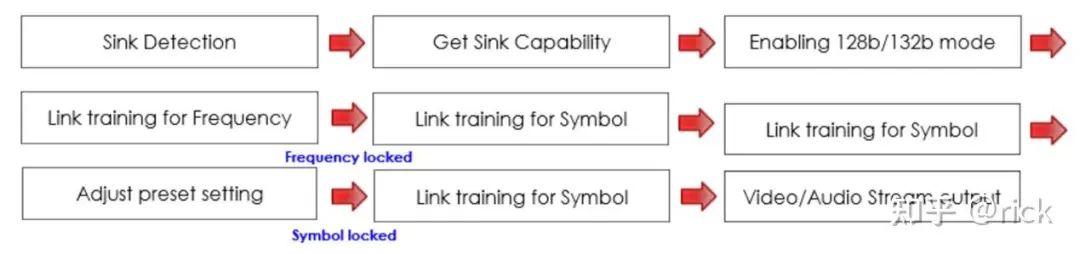
注:DP2.0协议时,将8b/10b编码改为了128b/132b编码,带宽利用率更高
下图是一个DP2.0 的Link training 流程示意图:
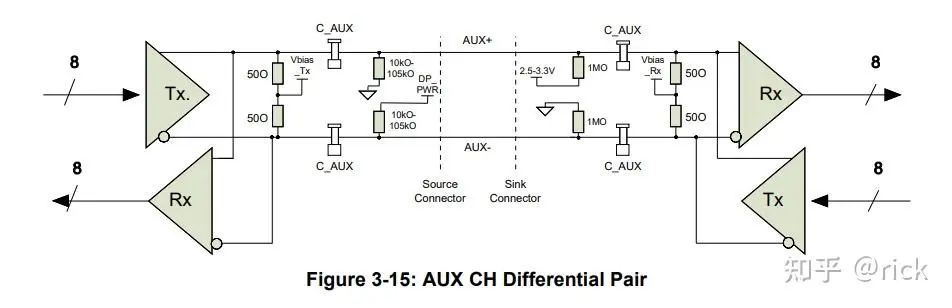
2. AUX CH:
Aux channel是一对半双工的双向数据通道,它被用来进行链接管理和设备控制等。
在Aux Channel 上传输的是自带时钟信号的曼切斯特编码,因此不需要传输时钟信号线。如下图所示:
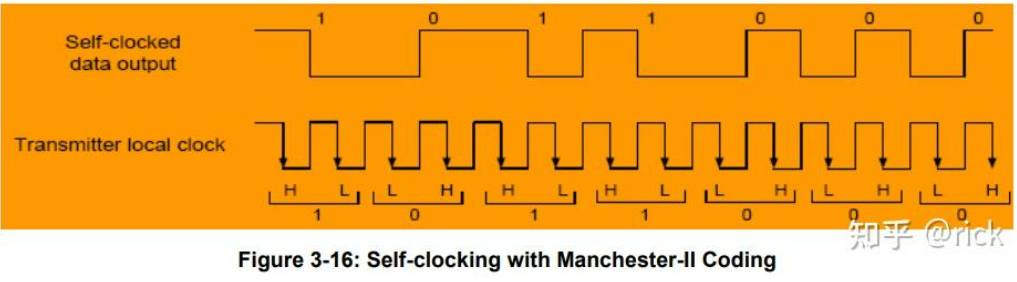
从图上可见,第一个时钟周期检测到下降沿(从H到L),信号为1;第二个时钟周期检测到上升沿(从L到H),信号为0,以后类推。
3. HPD
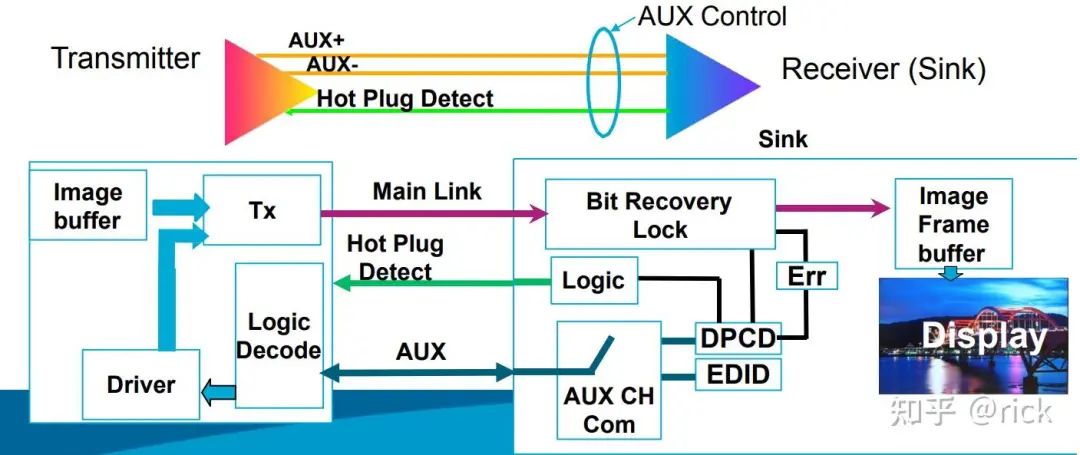
Hot Plug Detect,一根单独的信号线,用来从Sink端向Source端发出中断,通知Sink设备已经插入。下图为一个DP系统的示意图:
DP的传输协议
从DP传输分层架构来看,Link层提供三种服务分别是Isochronous Transport Services、AUX CH Device Services和AUX CH Link Services,其中Isochronous Transport Services主要是对于传输的音视频数据进行格式的打包填充,AUX CH Device Services主要用来管理源端和接收端的设备,比如读取EDID信息。AUX CH Link Services主要是对链路的维护配置,保障链路的正确建立,确保接收端和发送端时钟同步,确保main link上的数据准确传输。
这三种服务在Stream Policy Maker和Link Policy Maker的策略指挥下进行“服务”,受Policy Maker的控制。
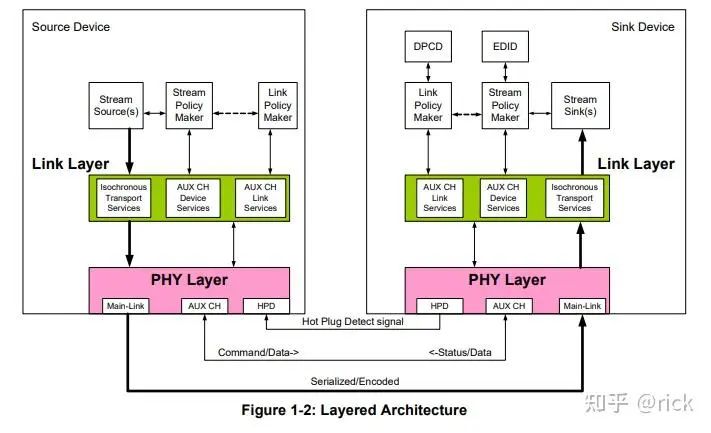
PHY层主要负责发送/接收数据。
在接收端设备中,有着显示端口配置寄存器,里面的配置数据(DPCD)描述了DPRX的功能,就像EDID描述了接收端显示器的的功能一样。Link and Stream Policy Makers分别管理Link和Stream。
在Main link的数据传输中,按如下的格式进行组包发送:
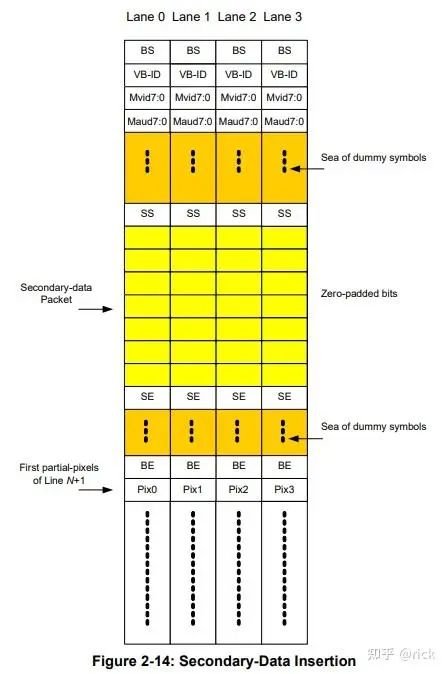
这里面要注意的是SDP,SDP是Secondary Data Packet的含义。在DP协议中,SDP被用来传输如下的信息:
(1) CEA-861-F INFOFRAME SDP
(2) Audio_Stream SDP
(3) Audio_TimeStamp SDP
音频数据将从SDP数据包中进行发送。在DP协议的文档中,非常详细的描述了SDP的类型,以及各种传输包结构。有兴趣的话可以自行查阅,本处不再赘述。
SS和SE信号之间传输的是SDP包。在BE和FS信号之后,开始传输实际的像素点数据,直至FE信号结束。其中FS代表Fill start,FE代表Fill End。
DP的传输带宽
DP可以传输16,18,24bit R'G'B', YUV444, YUV422等格式的视频流信号。并且采用8b/10b的编码格式。因此在计算显示器所需的带宽速率时,需要考虑到这些因素的影响。同时还要考虑blanking的影响,采用Htotal*Vtotal来计算。下表是一个不同版本DP的理论物理带宽和有效带宽规格:

对于一个4K@60fps的视频传输要求,如果采用24bit 的RGB格式传输,它所需要的带宽为:
分辨率: 3840×2160(Htotal=3920、Vtotal=2222)
刷新率: 60Hz
色彩深度: 8bit
色彩格式: RGB 24bit(RGB:8乘以3,YC422:8乘以2,YC420:8乘以1.5)
将以上四个相关参数乘起来,即可得到所需带宽:
3920 * 2222 * 60 * 8 * 3 = 12,542,745,600(12.543Gbps)
如果DP不能提供足够的带宽,也可以将24bit RGB转换为YUV422 色彩格式进行传输,此时所需要的带宽就变成:
3920 * 2222 * 60 * 8 * 2 = 8,361,830,400 (8.362Gbps)
通过查找下表,即可得到满足要求的DP有效带宽。即DP v1.2以上,4-lane传输可以满足4K@60fps要求。如果DP只能支持到V1.0,那么必须采用YUV422格式进行传输才可以。

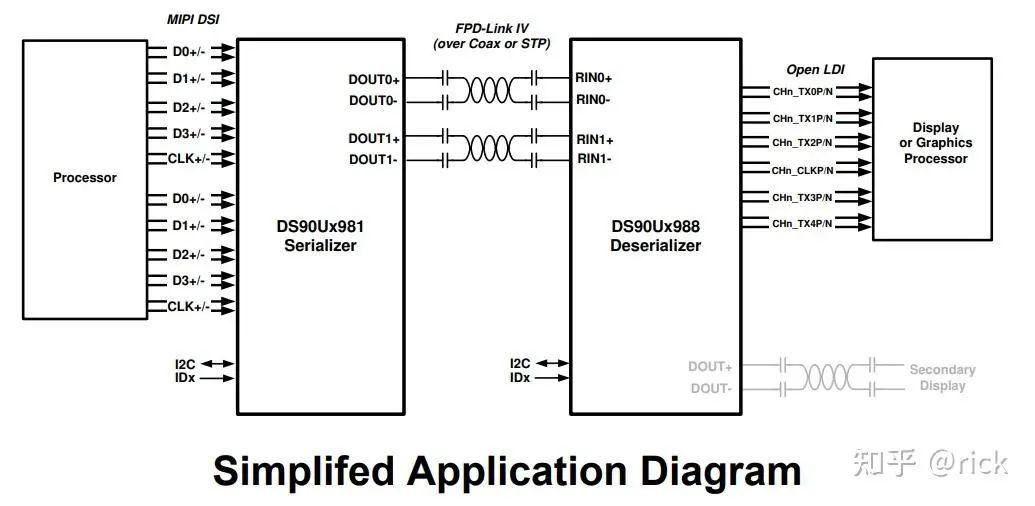
DSI是MIPI联盟定义的,位于移动应用处理器与显示模组之间的高速串行接口。所谓的MIPI,也就是Mobile Industry Processor Interface的缩写,移动行业处理器接口。显而易见,MIPI-DSI原来是为移动应用处理器所设计的,它广泛应用于手机,平板电脑等产品上。由于高通等原手机芯片厂商纷纷进军智能座舱市场,因此目前在汽车座舱内,也需要考虑如何支持DSI接口。最常见的使用情况,是从AP输出DSI信号,通过串行解串器,在显示屏端以OLDI或者eDP的方式接入。
DSI 分层结构
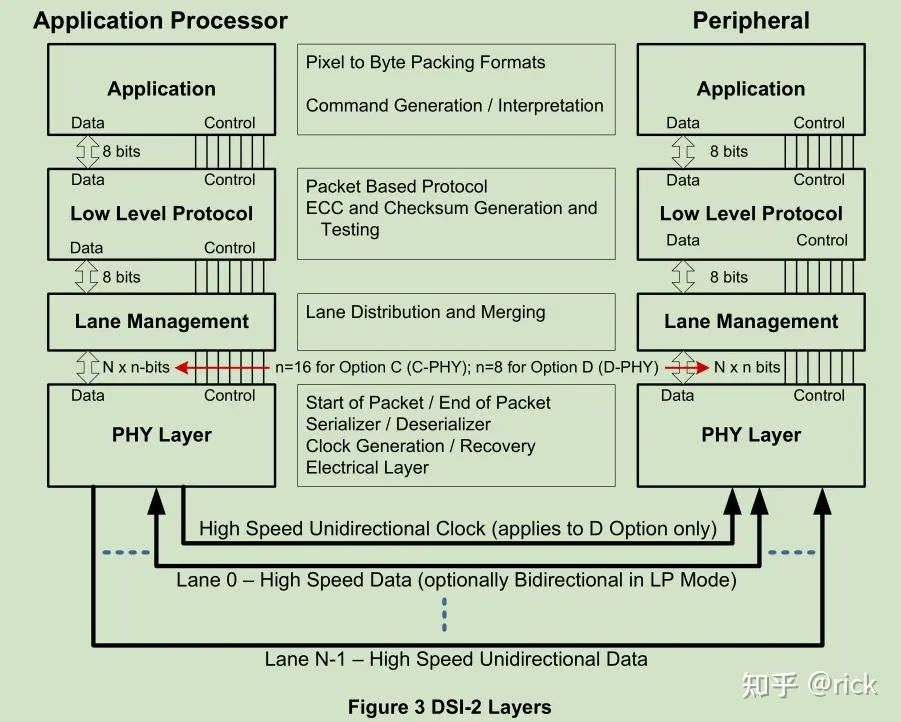
DSI分四层,对应D-PHY、DSI、DCS规范、分层结构图如下:
PHY 定义了传输媒介,输入/输出电路和和时钟和信号机制。
Lane Management层:发送和收集数据流到每条lane。
Low Level Protocol层:定义了如何组帧和解析以及错误检测等。
Application层:描述高层编码和解析数据流。
Command和Video模式
DSI兼容的外设支持Command或Video操作模式,用哪个模式由外设的构架决定。
Command模式是指采用发送命令和数据到具有显示缓存的控制器。主机通过命令间接的控制外设。Command模式采用双向接口。
Video模式是指从主机传输到外设采用时实象素流。这种模式只能以高速传输。为减少复杂性和节约成本,只采用Video模式的系统可能只有一个单向数据路径。
DSI系统框图
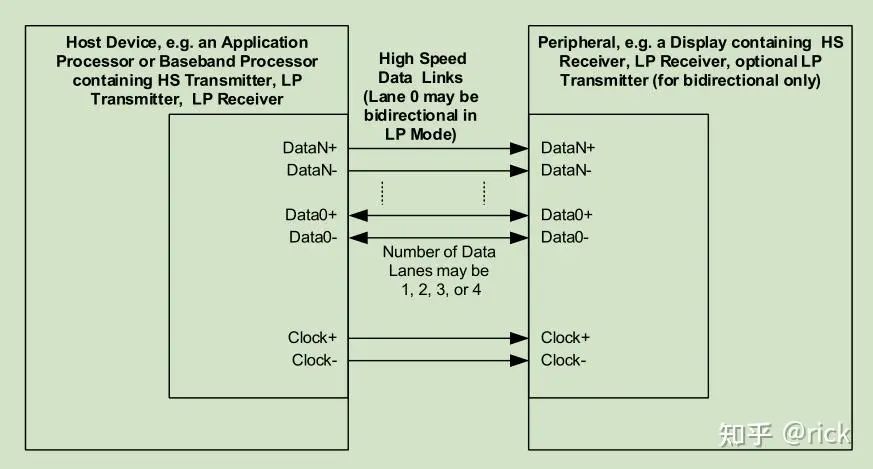
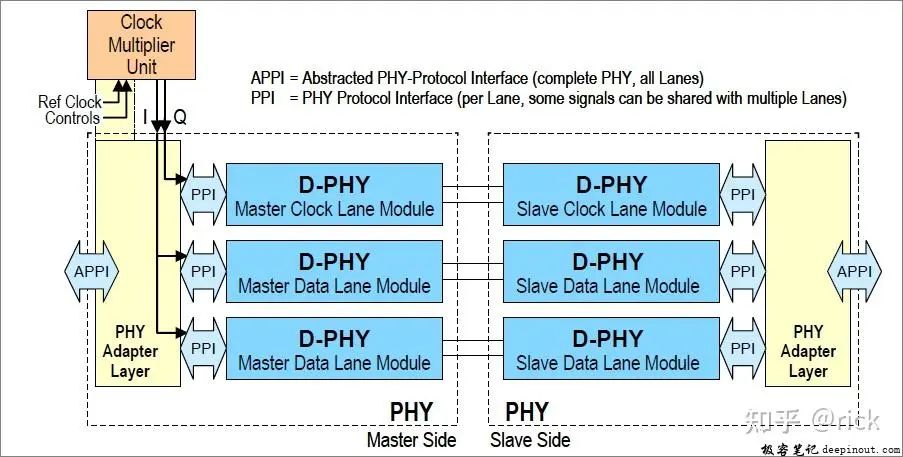
以上架构主要描述的是手机等移动设备内部采用MIPI-DSI D-Phy 接口的传输连接方式(如果是C-Phy,则物理层架构与D-Phy不同)。一个DSI port,具有一对时钟传输线,2对或者4对数据传输线。分别称为2-lane或者4-lane。如下图,D-phy的结构显示了一对clock lane,再加上2对数据lane的连接情况。
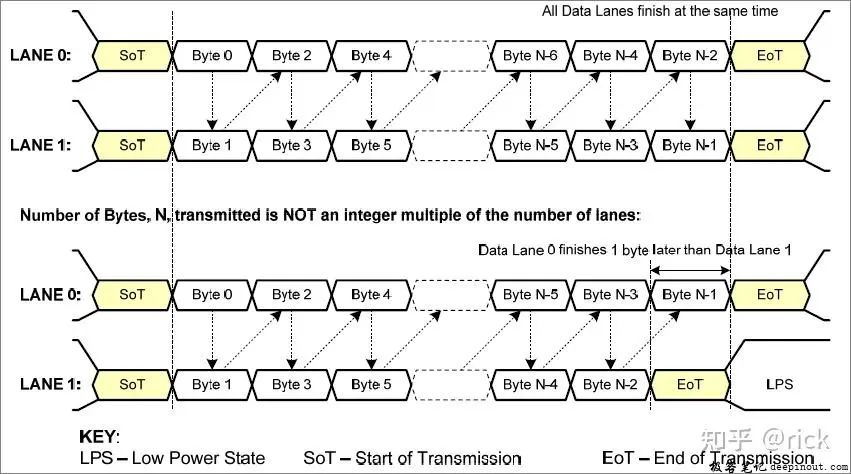
MIPI DSI是按帧的结构来传输数据的,每一帧或者是固定4字节(短帧),或者是可变长度帧(长帧)。其中每对数据lane上均以SoT(Start of Transmission)字节为开始,以EoT(End of Transmission)字节为结束。然后按字节进行逐个传输。以2对data lane为例,传输方式参见下图:
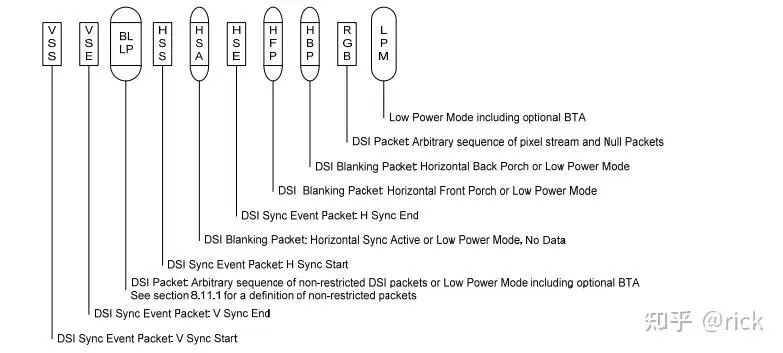
DSI上传输的长帧结构如下图所示:

Packet data中,由多个RGB数据包所组成,每个RGB数据包如下图所示:
仪表屏(Instrument Cluster) 是车内唯一需要考虑功能安全Functional Safety(Fusa)的显示设备。在传统燃油车时代,仪表盘为用户提供的信息主要有:汽车时速,发动机转速,油量信息,灯光状态信息,各种安全告警状态图标等。这其中,安全告警状态图标在是需要满足ASIL-B级别的功能安全需求的。通常把这些安全告警图标称为"telltale"。
为了让"telltale"达到ASIL-B级别的Fusa标准,需要在智能座舱SOC的显示系统上进行相关的处理。并且根据ISO-26262的规范要求,处理telltale 事件的全链路要求达到ASIL-B标准。这其中包括安全信息的初始来源,安全信息传输到SOC的通道,SOC如何生成对应的告警图标,SOC如何显示对应的告警图标,如何对比检测图标与原始安全信息是否匹配,没有发生错漏,这是仪表屏需要特别注意的。这其中,既包括了硬件设备,也包括了软件系统。例如生成telltale信息的操作系统是否满足ASIL-B级别要求?
中控大屏也称为信息娱乐屏 ICS(Instrument Central Screen)。在智能车时代,中控大屏已经是必不可少的设备,它是用户控制全车设备,了解汽车状态,进行娱乐的最重要入口,是“第二空间”的必要载体。
在技术上,中控大屏并没有特别的要求,一般来说需要满足如下条件:
屏幕尺寸:中控大屏尺寸有 8、10、11.3、12.3、12.8、14、15、17、17.7 多种。其分辨率一般都要求在1080P以上。例如宝马i4,iX的中控屏为14.9英寸,分辨率2880*1080,像素密度达到206ppi;再比如蔚来ES8,其中控液晶屏尺寸为11.3英寸,分辨率为1400*1600,像素密度188ppi。关于刷新率,至少要求达到60Hz。90Hz应该是很快就可以达到量产条件。只有在这样的分辨率,刷新率,以及屏幕尺寸的条件下,车载娱乐系统才能取得类似于手机,平板等消费类电子的体验效果。
触摸屏:在智能车时代,大量的实体按键被取消,其功能均被集成到中控大屏上。这时就需要良好的触控来提升用户的体验。我们很难设想一个用户在中控屏上使用触摸功能时,等待半天才能得到反馈信息。在技术上,既要求中控屏能提供反应灵敏的触摸功能,又要求智能座舱SOC能提供足够快速的中断响应和处理能力。
远距离传输:在车内,中控屏与智能座舱SOC之间的距离有时可以长达10米以上。如果既要保证足够的数据处理能力(分辨率*刷新率),又要满足车载环境的要求,那么就一定要考虑Serdes传输线缆如何布置。
IC与ICS的融合:目前一部分新能源车,已经开始逐步取消了IC仪表显示屏。它们把相关的显示内容,都整合到中控大屏上,划出一块特定的区域,来显示相关的信息。这里需要注意的,主要是telltale功能如何整合到ICS屏上,如何能保证ICS屏中显示telltale图标满足ASIL-B功能。
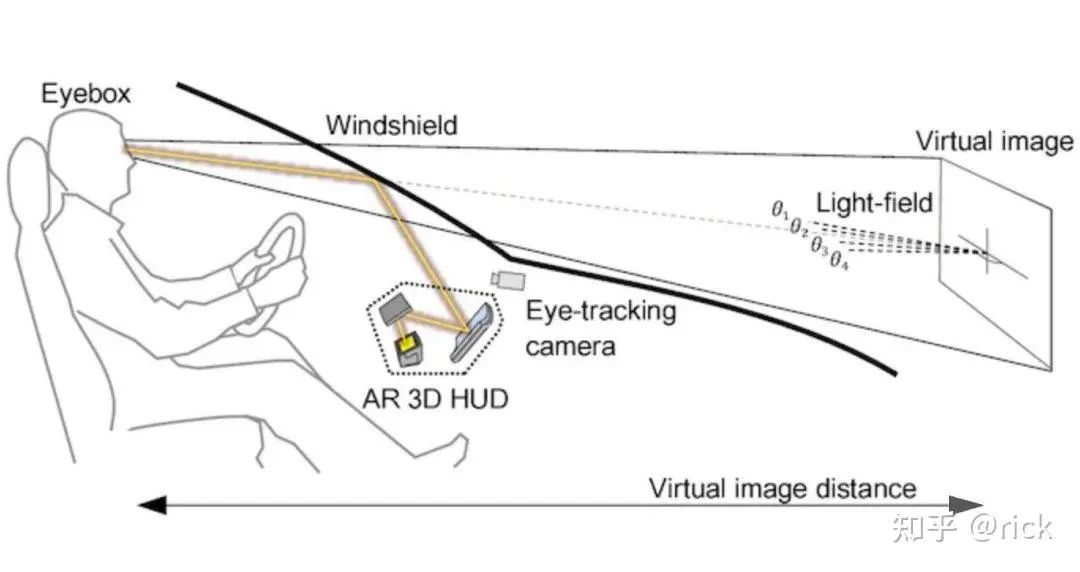
HUD( Heads Up Display)抬头显示系统,作为一种综合电子显示设备,可以将车辆的信息,如车速、油耗、发动机转速、导航等,投影到前挡风玻璃上或其他显示介质上,供驾驶者查看,从而减少驾驶者因低头或视线转移而带来的安全隐患。
其原理为将像源显示的图像信息通过透镜或反射镜系统进行放大,再通过风挡玻璃反射至驾驶员的眼部活动区域,即眼动范围或眼盒(Eyebox),在风挡玻璃前方一定距离上形成虚像,从而将仪表、中控信息更直观地展示在人眼的正前方。
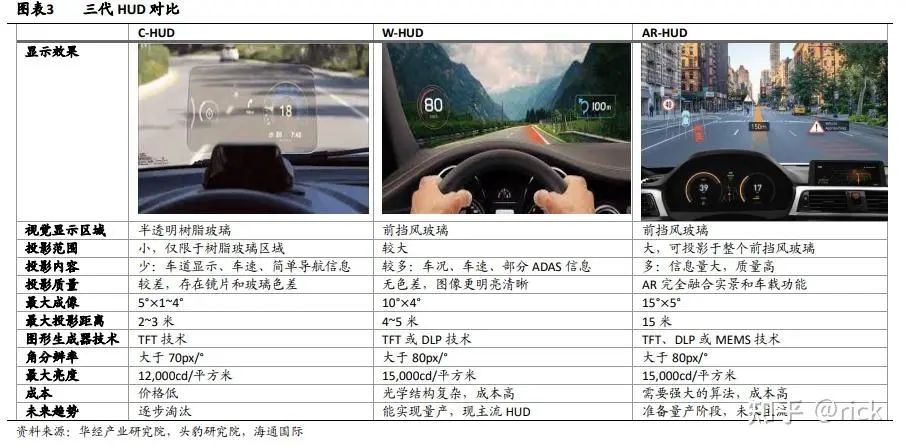
根据HUD的成像方式和显示内容,目前车载HUD主要分为以下三类:
C-HUD (Combiner HUD ) :C-HUD常见于后装市场,其会在汽车仪表盘上方,加装一个半透明的树脂板,并将该树脂板作为投影介质。通过一个半反半透的曲面反射镜将像源的显示图像放大,在前方投影出一个虚像。C-HUD布置灵活,但其缺陷主要是视场角、虚像尺寸和投影距离都较小,而且重影现象比较明显,整体体验较差,并且技术上不容易解决,或将被逐渐淘汰。

W-HUD (Windsheild HUD ):可以直接将图像投影至车辆前挡风玻璃,可以支持更大的成像区域和较远的投影距离。W-HUD 的劣势在于,挡风玻璃通常为曲面反射镜,W-HUD必须根据挡风玻璃的尺寸和曲率去适配高精度曲面反射镜,因此成本相对较高,主要应用于中高端车型,目前正在向中低端车型普及。

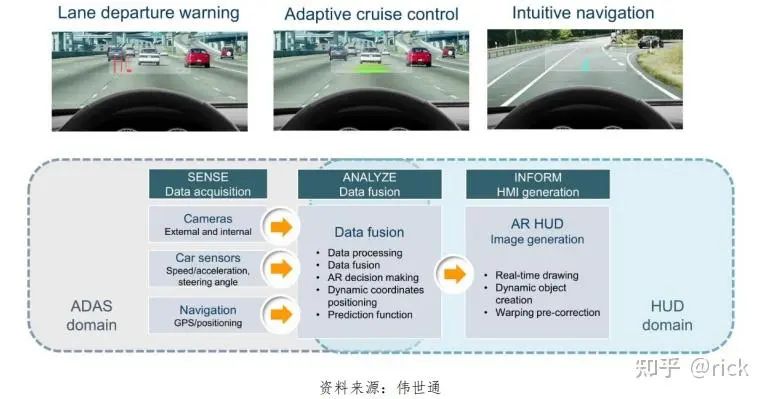
AR-HUD (Augmented Reality HUD ) :它与W-HUD一样采用前挡风玻璃为成像介质,但AR-HUD应用了增强投影面技术,其视场角(FOV)大于10°、成像距离(VID)大于7米,所能呈现的信息更丰富。AR-HUD需要通过智能驾驶的传感器(摄像头,雷达等),对前方的路况进行建模和解析,以得到对象的位置,距离,大小等要素,再把HUD显示的信息精准地投影到对应位置。AR-HUD可将投射信息与交通环境进行高度融合,例如行驶过程中的车道线贴合,前方障碍物/危险物贴合,车道偏离预警等。
AR-HUD整体显示效果出众,是智能驾驶和智能座舱的重要组成部分。
目前AR-HUD的缺点是体积较大,在整车上布置较为困难。同时技术还不够成熟,其显示效果,获取的信息精度还有待提升。

三代HUD对比
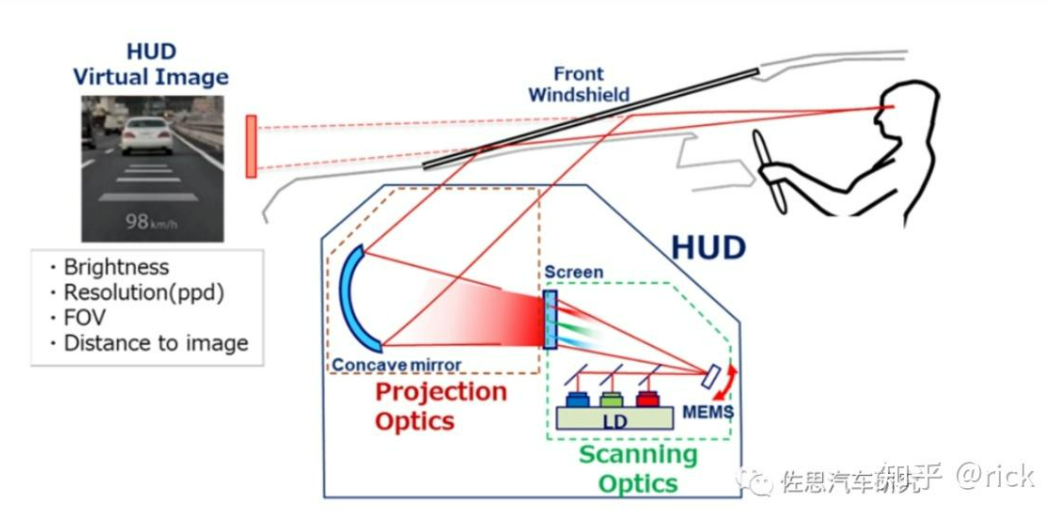
HUD的结构
从结构组成上来看,HUD主要是成像、光学投影以及软件三大块。
成像
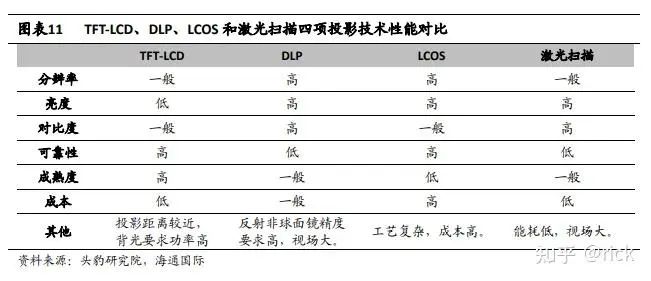
HUD的成像主体是影像源,被称之为PGU(Picture Generation Unit,即图像生成单元)。目前主流的PGU方案分为四种,TFT、DLP、LCOS、LBS。
· TFT,即TFT-LCD,是采用液晶显示面板透射成像。该方案是业界最早开发的投影方案,方案成熟。其原理是利用液晶显示面板透射成像,透过背光照明,液晶挡住了大部分光,所以亮度不够,且产生大量热量。
· DLP即Digital Light Processing的缩写。DLP 是美国德州仪器的专利技术,通过集成了数十万个超微型镜片的 DMD(Digital Micromirror Device)将强光源经过反射后投影出来。相较于 TFT 成像技术,DLP 不需要液晶偏光片,而是采用 DMD 反射式投影,减少亮度损失。DLP 技术产生的图像分辨率高,对比度高,成像逼真,但成本较高。
· LCOS(Liquid Crystal on Silicon),即液晶附硅,也叫硅基液晶,是一种基于反射模式,尺寸比较小的矩阵液晶显示装置。这种矩阵采用CMOS技术在硅芯片上加工制作而成。LCOS 技术使光源经过分色镜后投射至三片 LCOS 面板,再通过合光系统形成影像。LCOS 在分辨率、亮度、色彩等方面有优势。
· LBS,即Laser Beam Scanning,激光投影扫描。是将RGB三基色激光模组与微机电系统(Micro-Electro-Mechanical Systems,MEMS)结合的投影显示技术方案。它以激光作为光源,通过 MEMS微振镜形成投影,具有组件小、能耗低、亮度高、视场大的优点,但是成本很高,激光二极管对温度较敏感,不能达到 85℃的工作要求,因此激光扫描投影暂未大规模应用于车载 HUD。

光学投影
光学投影是将PGU发出的光线放大再投影至风挡玻璃,也就是在上面的AR HUD简图中的两次反射部分——一块固定反射镜以及一块自由曲面反射镜。目前HUD整机的体积主要就是来源这个光学投影部分。
软件
软件部分主要包括AR生成器、车载地图、导航系统、语音系统等。其中,AR生成器(ARCreater)是一整套AR显示的软硬件解决方案,是通过数据及空间坐标融合,将虚拟信息渲染到实景画面中,从而形成虚拟信息和实景信息融合显示的效果。具体来看,AR 生成器需要融合以下这些数据:
· 道路元素的识别数据,通过图像深度学习的卷积神经网络产生识别模型,对前方实景感兴趣范围(ROI)进行扫描识别,获取车道线、车辆、行人、非机动车、交通标志、红绿灯等道路物体的空间坐标;
· AR导航信息,导航的路线信息包含转弯、距离、时间等,以及导航指示信息如路况、路口可通行车道信息、沿途POI、电子眼等信息;
· 其他信息,车身运行信息如车速、转速、水温、电压、胎压监控、盲区提示、ACC等信息;多媒体信息,如来电、蓝牙、FM等信息。
AR HUD 不仅要融合来自导航和 ADAS 系统的信息,还要考虑到精确定位、时间戳、3D 渲染、UI/UX,还要有提前预测的功能,以便于给司机提供更准确和有效的提示信息。
来源: 车规半导体硬件
end
精品活动推荐



专业社群
部分入群专家来自:
新势力车企:
特斯拉、合众新能源-哪吒、理想、极氪、小米、宾理汽车、极越、零跑汽车、阿维塔汽车、智己汽车、小鹏、岚图汽车、蔚来汽车、吉祥汽车、赛力斯......
外资传统主流车企代表:
大众中国、大众酷翼、奥迪汽车、宝马、福特、戴姆勒-奔驰、通用、保时捷、沃尔沃、现代汽车、日产汽车、捷豹路虎、斯堪尼亚......
内资传统主流车企:
吉利汽车、上汽乘用车、长城汽车、上汽大众、长安汽车、北京汽车、东风汽车、广汽、比亚迪、一汽集团、一汽解放、东风商用、上汽商用......
全球领先一级供应商:
博世、大陆集团、联合汽车电子、安波福、采埃孚、科世达、舍弗勒、霍尼韦尔、大疆、日立、哈曼、华为、百度、联想、联发科、普瑞均胜、德赛西威、蜂巢转向、均联智行、武汉光庭、星纪魅族、中车集团、赢彻科技、潍柴集团、地平线、紫光同芯、字节跳动、......
二级供应商(500+以上):
Upstream、ETAS、Synopsys、NXP、TUV、上海软件中心、Deloitte、奇安信、为辰信安、云驰未来、信大捷安、信长城、泽鹿安全、纽创信安、复旦微电子、天融信、奇虎360、中汽中心、中国汽研、上海汽检、软安科技、浙江大学......
人员占比
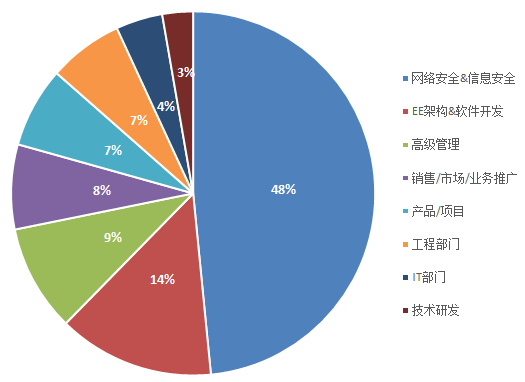
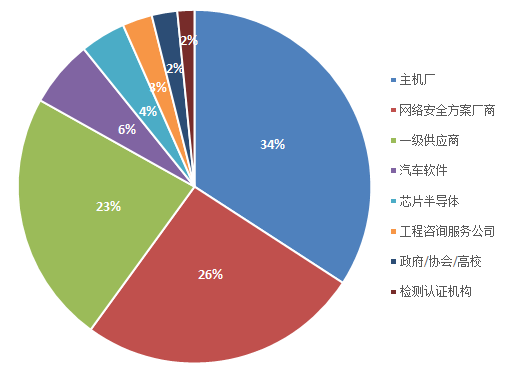
公司类型占比
更多文章
关于涉嫌仿冒AutoSec会议品牌的律师声明
一文带你了解智能汽车车载网络通信安全架构
网络安全:TARA方法、工具与案例
汽车数据安全合规重点分析
浅析汽车芯片信息安全之安全启动
域集中式架构的汽车车载通信安全方案探究
系统安全架构之车辆网络安全架构
车联网中的隐私保护问题
智能网联汽车网络安全技术研究
AUTOSAR 信息安全框架和关键技术分析
AUTOSAR 信息安全机制有哪些?
信息安全的底层机制
汽车网络安全
Autosar硬件安全模块HSM的使用
首发!小米雷军两会上就汽车数据安全问题建言:关于构建完善汽车数据安全管理体系的建议
