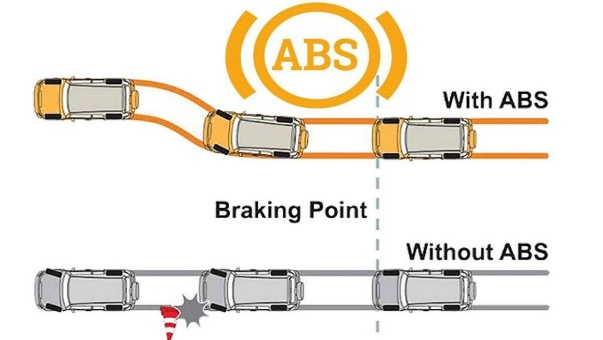
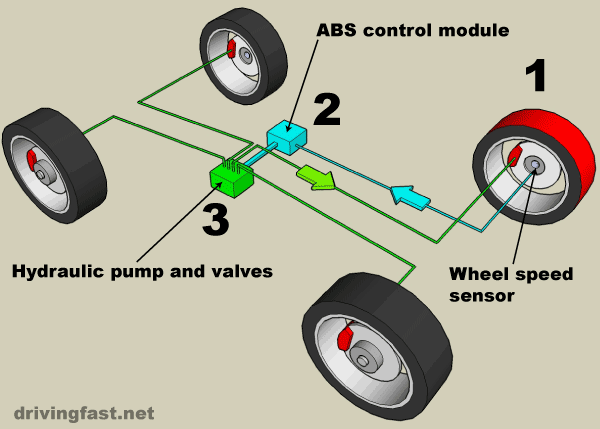
ABS(Anti-lock Braking System,防抱死制动系统)是一种安装在汽车上的安全技术,其主要功能是在急刹车或极限驾驶条件下,防止车轮抱死,使车辆保持可控性。车轮抱死是指在制动过程中,车轮转速完全停止,导致车辆失去牵引力,从而发生打滑、失控甚至发生事故。ABS通过智能控制系统,自动调节制动力,避免车轮锁死,显著提升驾驶安全性。在普通驾驶过程中,司机可能在面对突发状况时采取紧急制动,这时如果没有ABS的帮助,车轮容易抱死,导致车辆失控。ABS能够有效减少这种风险,并提高制动时的稳定性,尤其在湿滑、冰雪或其他不稳定路面上表现尤为出色。此外,ABS系统的广泛应用不仅提升了驾驶员的安全感,还能缩短制动距离,在各种路况下表现出色。当快速行驶的汽车猛烈踩下制动器时,车轮会在路面上打滑,同时车辆会向前滑动。此时车轮处于锁定状态,驾驶员很难通过转向来控制车辆,制动距离也会变长,从而增加了发生事故的可能性。因此,如果分次踩下制动器,可以更稳定地控制转向,并且制动距离也会缩短。ABS是一种即使驾驶员猛烈踩下制动器,也能自动分次踩下制动器的系统。ABS系统的基本工作原理是通过实时监测车轮转速,并与车辆的行驶速度做对比。一旦系统检测到某个车轮即将锁死(即转速急剧降低或停滞),就会通过液压系统减轻或释放制动力,使车轮恢复转动。这样一来,车轮不会完全停止转动,制动力可以持续施加,同时保持车辆的可控性。基于当下电子液压制动系统的情况下,ABS系统主要由三个核心组件构成:- 车轮速度传感器:每个车轮上都装有传感器,实时监测车轮转速。当某个车轮的转速出现异常变化时,传感器将信号传输给控制单元。
- 液压控制单元(HCU):负责调节制动力的大小。通过增压、减压或保持液压压力来调控制动系统的工作状态,避免车轮抱死。
- ABS控制单元(ECU):作为ABS的大脑,ECU接收来自车轮传感器的数据,并根据这些信息判断是否需要调节液压系统的工作方式。控制单元根据复杂的算法快速计算出最佳制动方式,从而避免车轮抱死。
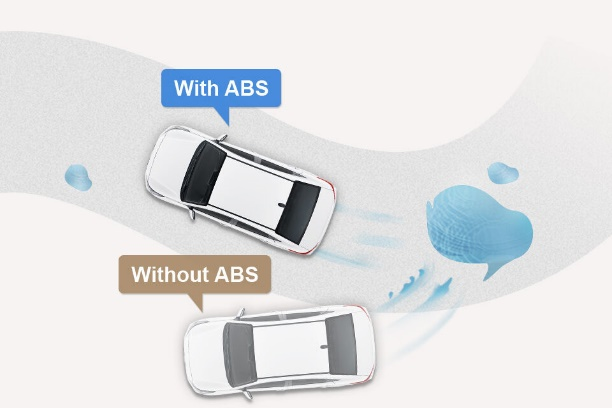
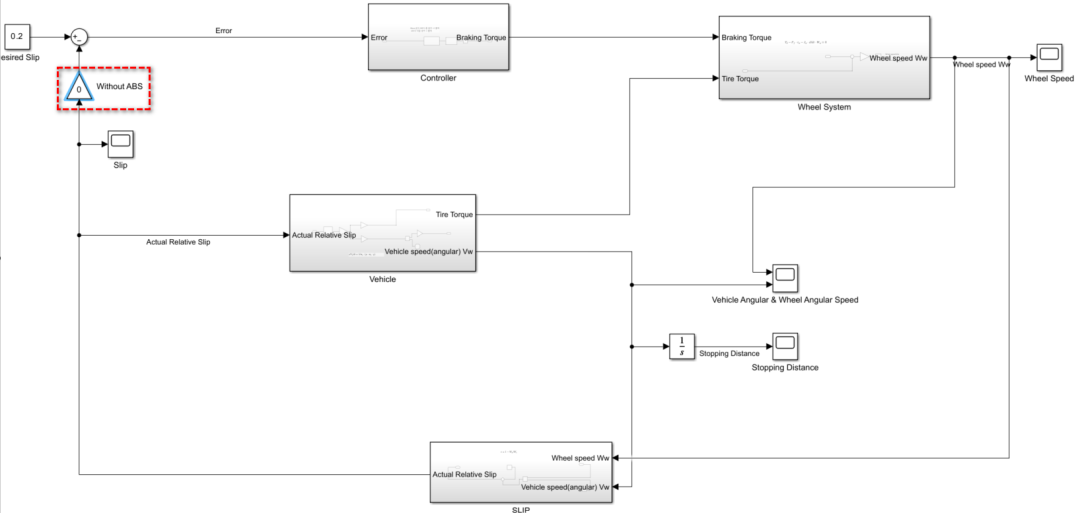
在正常情况下,车轮的转速与车辆的行驶速度大致保持一致。当驾驶员踩下刹车时,车轮的转速开始降低。ABS系统通过车轮速度传感器监测到这一变化,一旦检测到某个车轮转速过快下降并接近锁死,ECU会立即发送信号给液压控制单元。液压控制单元则通过快速减压或增压的方式调整刹车力度,使车轮不至于完全停止转动,从而恢复牵引力和车辆的控制性。ABS最大的优势之一就是能有效提升车辆的安全性。在紧急制动情况下,ABS通过防止车轮抱死,保持车辆的转向能力。没有ABS时,如果车轮锁死,车辆的方向性会丧失,驾驶员无法控制方向。而ABS系统能在制动时保持车辆的稳定性,让驾驶员即便在极限情况下仍然能够有效转向,避免事故发生。ABS通过对制动力的精确控制,能够减少制动距离。尤其在湿滑、冰雪路面上,普通的制动系统可能因车轮锁死而无法高效工作,而ABS系统能够最大限度地提高制动效果,缩短车辆的制动距离。尽管制动距离会受到路况、车速等多种因素影响,但ABS系统通常能够在复杂条件下提供更好的制动表现。ABS的另一个重要优点是改善了驾驶员的驾驶体验。驾驶员在面对紧急制动时,不需要过度担心车轮锁死和失控的风险。ABS能大幅降低驾驶员的心理压力,使其在面临紧急情况时能够更从容地进行应对。此外,ABS的顺畅运行还使车辆在不同驾驶场景下的表现更加稳定和可靠。在城市道路或普通路况下,驾驶员常常会遭遇急刹车的情况,比如前方突发停车的车辆或红绿灯变化。此时,ABS能显著提升车辆的安全性,避免车轮抱死,从而帮助驾驶员保持对车辆的控制。ABS在湿滑路面上的效果尤为突出。雨天、冰雪或结冰路面是驾驶中的危险因素,尤其在刹车时,轮胎容易打滑,失去摩擦力。而ABS通过及时调整制动力,防止车轮锁死,增强了车辆在这些极端路面上的牵引力和稳定性。同样,非铺装路面(如泥土、沙砾)上行驶时,ABS也能提供更加稳定的制动性能。在高速公路上,车辆通常行驶速度较高,急刹车的风险增大。ABS能够在高速制动时快速调节制动力,避免车轮锁死,提高行车安全性。在发生紧急情况时,驾驶员能够依赖ABS系统更好地控制车辆,减少潜在的碰撞风险。尽管ABS可以在大多数情况下提升制动效率,但并不是所有条件下都能显著缩短制动距离。在松散的砂砾、深雪等特殊路面上,ABS的表现可能不如预期,反而可能延长制动距离。因为在这些路面上,轮胎与地面的摩擦力较小,即使ABS进行调节,车辆的制动效果仍然受限。ABS虽然是现代汽车安全系统的关键部分,但它并不能替代安全驾驶习惯。驾驶员仍需遵守交通规则、保持安全车速、与前车保持安全距离等。ABS仅仅是一种辅助工具,在实际驾驶中,仍需要驾驶员保持警觉,合理应对不同情况。接下来,通过参考开源软件平台git-hub中作者为PARKJUNHO7265提供的ABS开源模型进行建模讲解。模块编号 | | | | |
| | 控制系统的目标滑移率,通常设定为一个固定值(如 0.2),以获得最佳抓地力。 | | |
|
| | 比较“期望滑移率”和“实际滑移率”的差值,计算出控制误差: | | |
|
| | 在没有ABS的情况下,滑移率反馈不被利用,制动过程简单直接地施加制动力矩。 | | |
| | 根据误差信号生成制动力矩信号,以调整车轮的制动力,使滑移率趋近目标值。控制器可能使用PID控制算法等。 | | Braking Torque(制动力矩),用于调整车轮的制动力。 |
| | | | |
| |
| | 模拟车辆的整体动力学,包括车辆速度、车轮角速度和滑移率之间的相互作用。 | | |
| |
| | | | Actual Slip(实际滑移率),用于反馈控制。 |
|
|
| Vehicle Angular & Wheel Angular Speed(车辆与车轮角速度模块) | 提供车辆和车轮的运动状态信息,包括车辆线速度和车轮角速度。 | | |
|
| Stopping Distance(制动距离计算模块) | | | Stopping Distance(制动距离),反映车辆从开始制动到完全停止的移动距离。 |
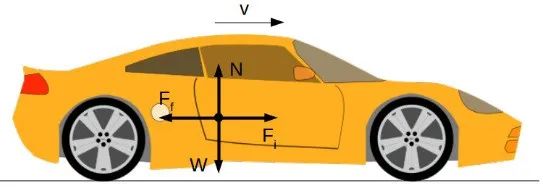
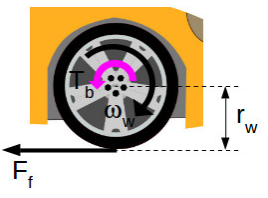
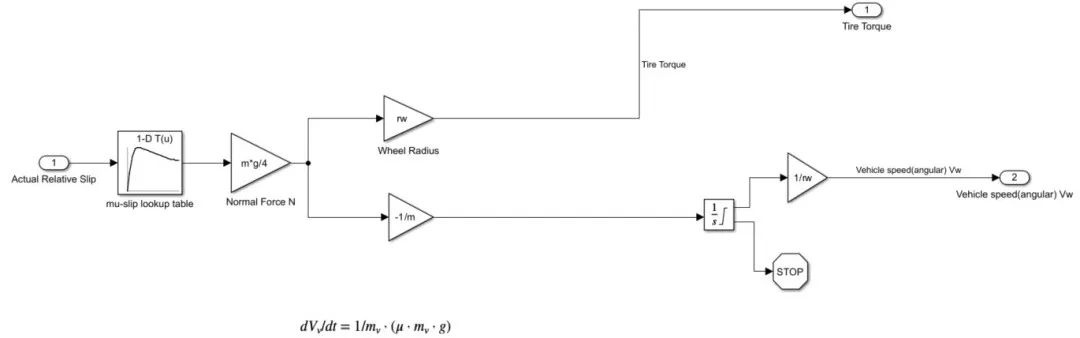
% 控制器参数 Controller parametersT = 0.01; 用于模拟制动系统惯性的时间常数Jw = 0.02; 车轮转动惯量 [千克·米^2]% 车辆参数 Vehicle parametersFf是车辆轮胎与地面之间的摩擦力,Fi是车辆的惯性力,N 是垂直力,W 是车辆的重量。此时,以下方程成立:Ff 可以表示如下:g 是重力加速度, mv 是车辆重量(kg):F_f = μ ⋅ N W = m_v ⋅ g F_f = μ ⋅ m_v ⋅ gFi 可以表示为 m_v 和车辆加速度的乘积,因此可以表示如下:F_i = m_v ⋅ a_v = m_v ⋅ dv_v / dt将 F_f 和 F_i 两个方程结合起来,可以得到关于车辆加速度的方程如下:① dv_v / dt = 1 / m_v ⋅ (μ ⋅ m_v ⋅ g)r_w 是车轮的半径,W _w 是车轮的角速度,T_b 是制动扭矩。此时,以下方程成立:T_b – F_f ⋅ r_w – J_w ⋅ dW_w / dt = 0② dW_w / dt = 1 / J_w ⋅ (T_b – F_f ⋅ r_w) 其中, F_f 是车轮与地面之间的摩擦力,J_w 是车轮的转动惯量,W_v 是车辆的线速度对应的角速度(通常是车辆速度除以车轮半径)。滑移率 s 描述了车轮速度与车辆速度之间的差异,是ABS系统中控制制动扭矩的重要参数。- λ=1:车轮完全抱死(即车轮停止转动,但车辆仍在滑行)。
- 0 < λ < 1:车轮存在一定滑移,但仍处于可控状态。
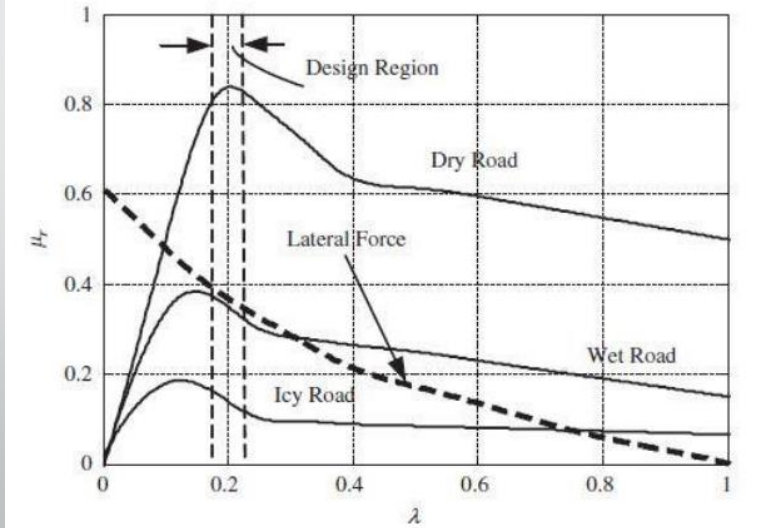
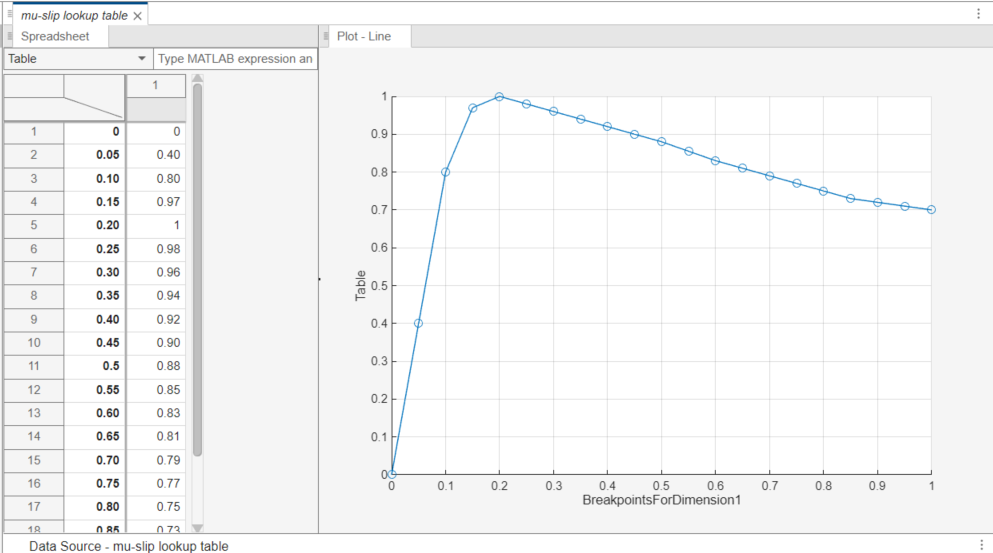
轮胎和地面之间的附着力(纵向力)与滑移率之间的关系可以用如下典型曲线描述:- 初始阶段(滑移率 λ<0.2):轮胎的抓地力随着滑移率的增加而上升。轮胎与地面的附着力主要由静摩擦力支撑,车轮处于最佳牵引力状态。
- 峰值阶段(滑移率 λ≈0.2):附着力达到最大值,这是轮胎与地面间的“峰值附着力”。
- 下降阶段(滑移率 λ>0.2):轮胎开始进入滑动摩擦,附着力下降。滑移率过高会导致车轮抱死,制动力显著减弱,同时车轮失去可控性。
将滑移率维持在 λ≈0.2的峰值点,可以最大化车辆的制动性能。- 最大制动力:滑移率 0.2 对应轮胎的最大纵向附着力,使车辆能够实现最短制动距离。
- 可控性:在滑移率为 0.2 时,轮胎和地面仍保持一定的抓地力,确保车辆在制动过程中具有横向稳定性(例如在紧急制动时保持方向控制)。
- 避免抱死:如果滑移率过高(接近 1),车轮可能抱死,导致失控和制动距离增加。
滑移率 0.2 并非固定值,而是根据以下因素综合得出的经验性目标:- 轮胎材料:不同轮胎(例如夏季胎、冬季胎、全地形胎)对滑移率的峰值附着力位置有所不同,但一般在 0.1-0.3 之间。
- 湿滑路面:峰值滑移率可能降低至 0.1~0.15。
- 车辆动态性能:悬架系统、车重分布等都会影响最佳滑移率。
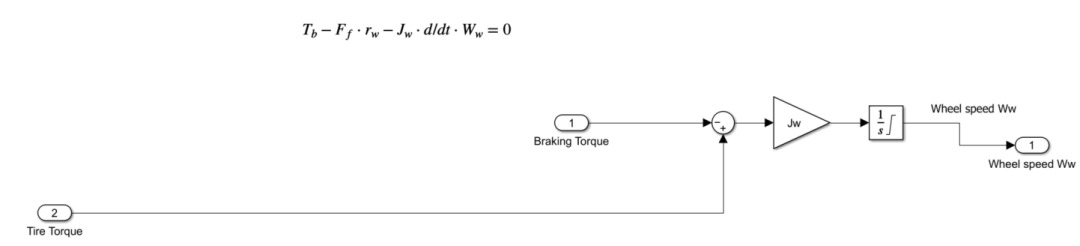
首先是对车轮的建模。轮胎扭矩与制动扭矩之差的积分等于车轮速度:- Tb:制动力矩(Braking Torque),由制动器施加的力矩。
- Ff:轮胎与地面的摩擦力(Tire Force)。
- dωw/dt:车轮角速度的变化率,表示车轮的加速度。
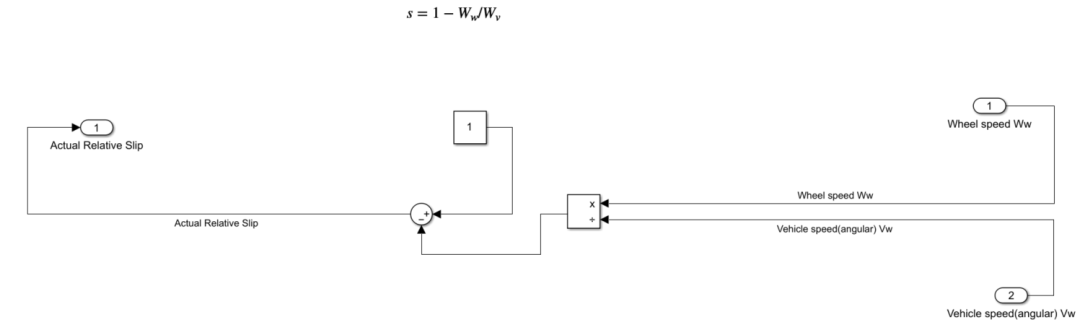
该方程表示制动力矩、摩擦力矩以及车轮惯性之间的动态平衡关系。接下来是计算滑移率的模型。将车轮的角速度除以车辆的角速度,然后从1中减去得到的结果就是滑移率。以下是计算车辆速度、轮胎扭矩等的模型。通过该模型可以求得轮胎扭矩、车辆的角速度、制动距离等。mg/4这个表达式用于计算车轮所受的法向力(Normal Force)。这里的 m代表车辆的质量,g代表重力加速度。通常,车辆的法向力会等于车辆的重量,即 mg。然而,在车辆的一个轮子上,法向力实际上是车辆总重量的四分之一,因为车辆的重量均匀分布在四个轮子上。在模型中,法向力 N通过将车辆的总重量 m*g 除以4来计算,这是因为在水平路面上,车辆的每个轮子承担的法向力是车辆总重量的四分之一。这个计算结果用于确定每个轮子与地面之间的正压力,进而影响摩擦力的计算。摩擦力 Ff可以通过摩擦系数 μ与法向力 N的乘积来计算,即 Ff = μ * N。在模型的后续部分,法向力还与车轮半径 rw相乘,用于将制动力转换为扭矩,这在计算轮胎扭矩时是必要的。扭矩是力对物体产生旋转效果的量度,它取决于力的大小和力臂的长度,在这种情况下,力臂就是车轮半径。总的来说,m/4的使用是为了将车辆的总重量转换为单个车轮所受的法向力,这是模拟ABS系统中轮胎与路面之间摩擦力的关键步骤。最后是控制器模型。这里使用的是Bang-Bang控制器,它接收误差值并输出制动扭矩。Bang-Bang控制器是一种开关控制器,它的输出在两个极端值之间切换。这里加法器(+ 和 -)模块用于将两个double模块的输出相加或相减:- 如果误差大于0,第一个double模块输出1,第二个输出0,加法器输出1。
- 如果误差小于0,第一个double模块输出0,第二个输出1,加法器输出-1。
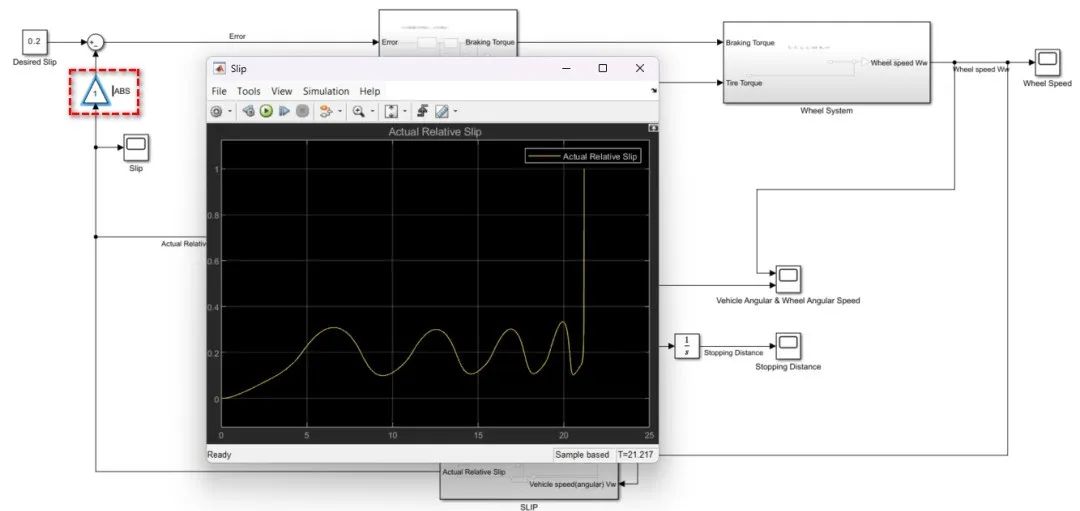
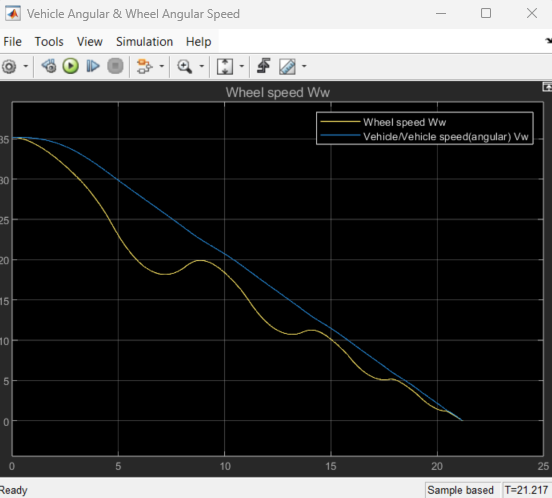
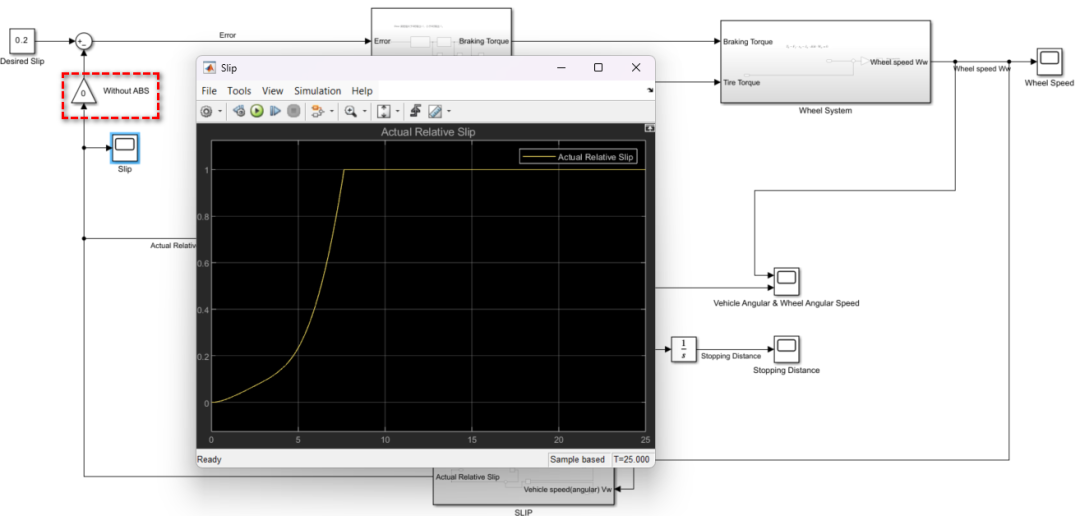
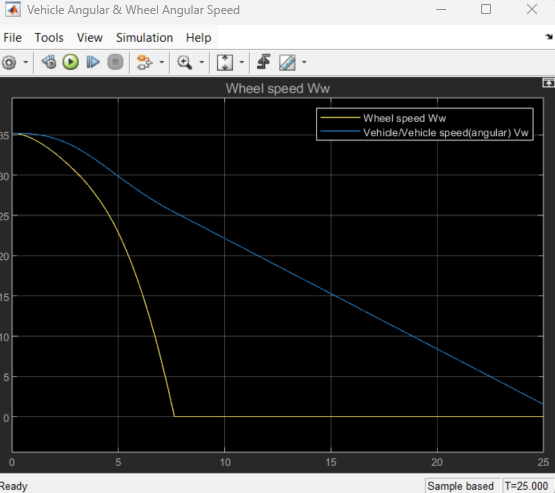
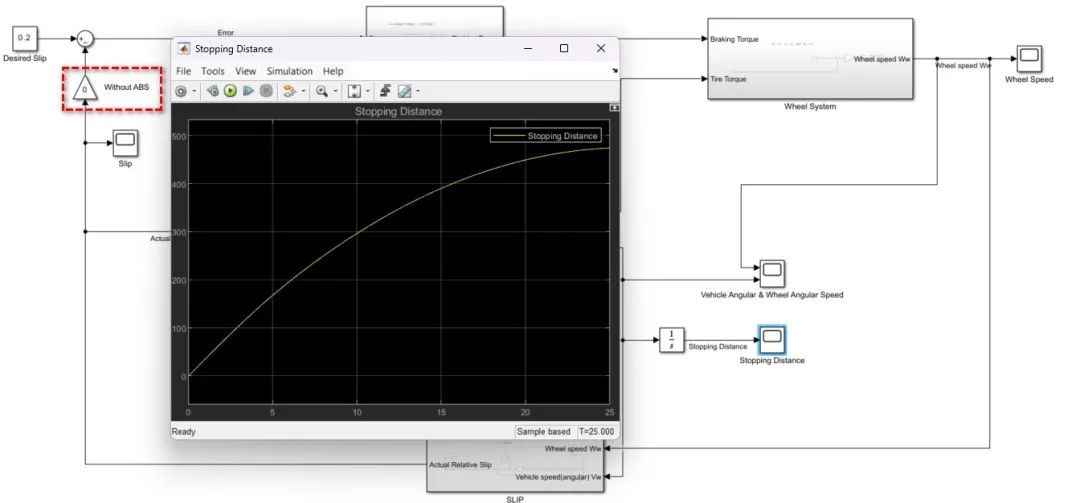
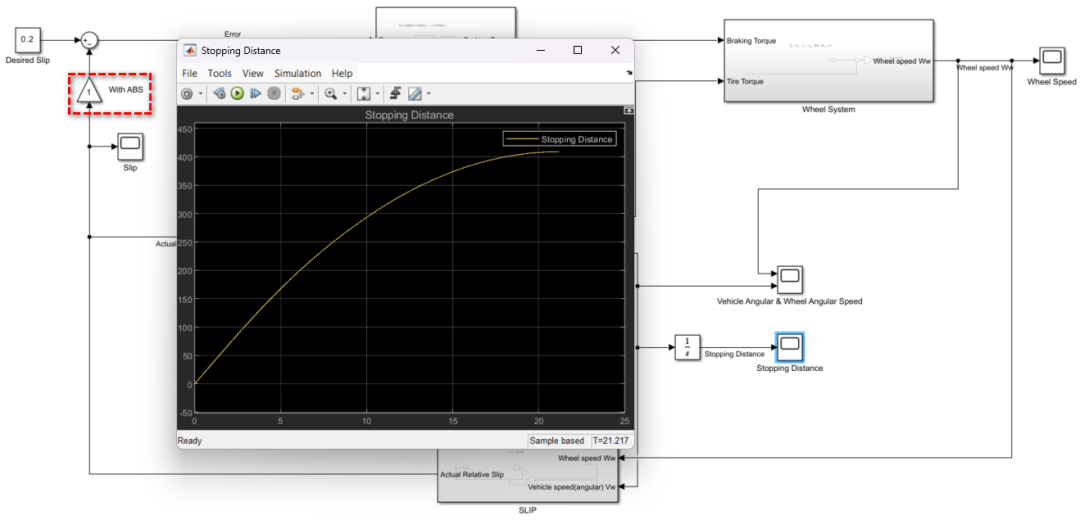
总结来说,这个SIMULINK模型实现了一个Bang-Bang控制器,它根据误差信号的正负,输出+1或-1,用于控制ABS系统中的制动扭矩,以保持滑移率在期望的范围内。这种控制器的特点是简单且响应迅速,但它可能会导致系统在两个极端值之间剧烈切换,这在实际应用中可能需要进一步的调整以避免过度的振动或不稳定性。对上述模型进行了25秒的仿真,得到的滑移率图形如下:在大约20秒的时间内,滑移率被控制在接近0.2的水平,而在大约22秒时,车辆被确认已经完全停止。以下是车轮和车辆速度的图形。可以确认防止车轮速度急剧下降并发生锁定的控制器运行良好。如上所述,通过将调整滑移率误差部分的增益设置为0,从而模拟了没有ABS的情况。结果如下:滑移率从期望值0.2开始不断增加,并且持续上升,让我们最终比较一下制动距离。图一是不使用ABS时的制动距离图,图二是使用ABS的情况。应用ABS的情况下,可以确认制动距离大约减少了70米。ABS作为现代汽车中不可或缺的安全系统,凭借其卓越的性能显著提升了车辆的安全性。无论是在日常驾驶还是极限情况下,ABS都能有效帮助驾驶员保持对车辆的控制,避免发生严重事故。然而,驾驶员在使用ABS时仍需保持良好的驾驶习惯,才能在复杂的道路环境中最大程度地保障安全。随着技术的不断进步,ABS的未来将更加智能化,并与其他主动安全系统结合,为我们的出行保驾护航。1.
What does ABS mean on a car? Understanding Anti-lock Braking Systems in Cars | Panda Hub Car Care
2.
PPT on ABS (Antilock Braking System) ~ Automation Engineering
3.
ALL ABOUT ABS - Mevotech
4.
ACCENT Safety | Sedan - Hyundai Worldwide
5.
What is Anti Lock Braking System - Explained in Details - Spinny
6.
ANTI LOCK BRAKING SYSTEM MODELLING AND DEVELOPMENT