STM32上可以通过软件模拟串口通信,不使用硬件串口引脚(如RX、TX)也是完全可行的。
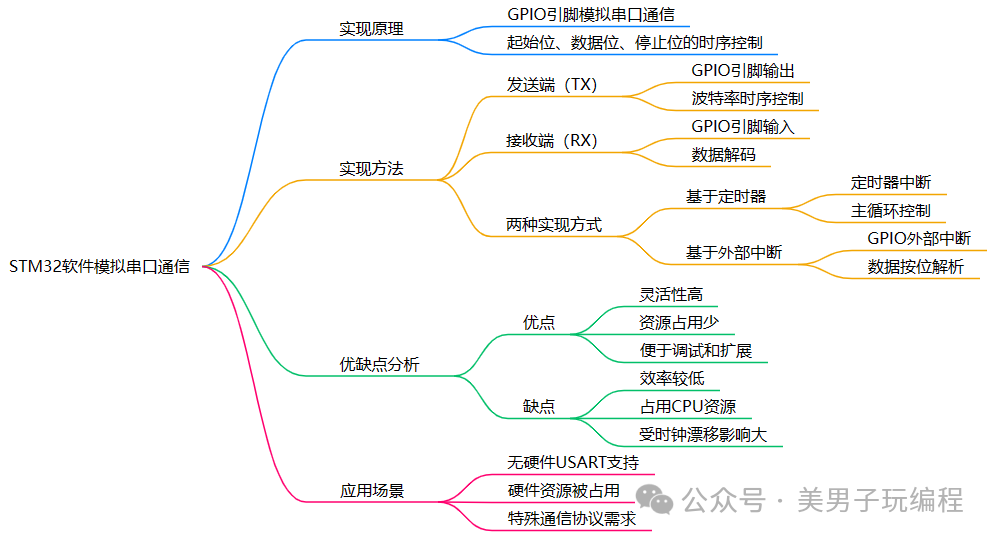
关键是通过精确控制GPIO的时序、波特率、数据位和停止位来完成数据传输。
这种方法适用于一些没有USART硬件支持的场景,或者当其他硬件资源已被占用时。
软件串口通信通过控制一个普通的GPIO引脚模拟串口通信的时序。
它模拟的过程包括发送和接收的时钟控制、数据位的编码和解码、起始位和停止位等内容。
例如,使用一个GPIO引脚作为TX(数据发送端),另一个作为RX(数据接收端)。
在数据传输时,TX端会根据约定的波特率按照特定的时序(起始位、数据位、停止位等)发送数据。
接收端RX则需要在固定的时钟节奏下读取数据并解码。
通常实现方法有两种:
基于定时器的实现:通过定时器生成精确的时间间隔,确保每一位数据的传输时长精确匹配所选波特率。例如,配置一个定时器以精确产生特定频率的时钟信号,利用定时器的中断或直接在主循环中进行波形控制,从而模拟串口的发送和接收。
基于外部中断的接收:接收端可以通过GPIO引脚配置为外部中断模式,当引脚电平变化时,触发中断并在中断服务程序中读取数据。由于接收的数据是按位传输的,因此需要在中断中管理每一位的接收,并按照约定的波特率来解析数据。
软件串口通信的优缺点优点:
灵活性高:不需要硬件的USART引脚,任何GPIO引脚都可以用来进行通信,适用于没有USART硬件支持的情况。
占用资源少:仅通过软件来实现,硬件资源占用较少,不需要额外的硬件模块。
便于调试和扩展:可以轻松修改通信协议,适合一些特殊的通信需求。
缺点:
效率较低:软件串口比硬件串口慢,因为它需要依赖主处理器来处理时序,且需要精确的时延控制,容易受主处理器负载影响。
占用CPU资源:由于需要精确的时序控制,软件串口通信会消耗较多的CPU周期,尤其是在高波特率时。
受时钟漂移影响大:由于没有硬件支持,时序可能受到系统时钟漂移的影响,需要时常校准。