LittleFS是一个应用于单片机内部flash和外挂NOR flash的文件系统。由于它相比传统的FAT文件系统更适合于小型嵌入式系统,具有以下特点:
掉电恢复能力: 设计用于处理随机电源故障。所有文件操作都有很强的写时拷贝保证,如果断电,文件系统将恢复到上一次已知的良好状态。
动态磨损均衡: 设计考虑到闪存,并提供动态块磨损均衡。此外,littlefs可以检测坏块并在它们周围工作。
有限RAM/ROM: 被设计为使用少量内存。RAM的使用是严格限制的,这意味着RAM的使用不会随着文件系统的增长而改变。文件系统不包含无界递归,动态内存仅限于可静态提供的可配置缓冲区。
官方的详细介绍参照此链接(https://github.com/littlefs-project/littlefs/)
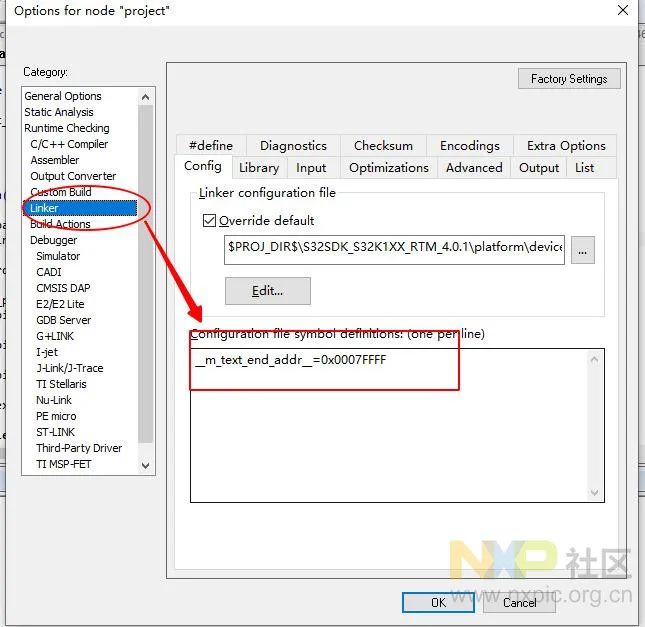
S32K146 内部的Pflash 资源大小为1M,这个大小对普通的嵌入式开发资源是有很大的空闲的,本次试验基于内部的pflash 将后512K资源划分为文件系统分区,使用littlefs 进行管理,我们修改链接脚本把后512K资源保留出来给文件系统使用,本次试验使用的IAR环境,link file 修改如下:

littlefs 移植适配依赖物理层的配置结构体如下:
// Configuration provided during initialization of the littlefsstruct lfs_config {// Opaque user provided context that can be used to pass// information to the block device operationsvoid *context;// Read a region in a block. Negative error codes are propagated// to the user.int (*read)(const struct lfs_config *c, lfs_block_t block,lfs_off_t off, void *buffer, lfs_size_t size);// Program a region in a block. The block must have previously// been erased. Negative error codes are propagated to the user.// May return LFS_ERR_CORRUPT if the block should be considered bad.int (*prog)(const struct lfs_config *c, lfs_block_t block,lfs_off_t off, const void *buffer, lfs_size_t size);// Erase a block. A block must be erased before being programmed.// The state of an erased block is undefined. Negative error codes// are propagated to the user.// May return LFS_ERR_CORRUPT if the block should be considered bad.int (*erase)(const struct lfs_config *c, lfs_block_t block);// Sync the state of the underlying block device. Negative error codes// are propagated to the user.int (*sync)(const struct lfs_config *c);// Lock the underlying block device. Negative error codes// are propagated to the user.int (*lock)(const struct lfs_config *c);// Unlock the underlying block device. Negative error codes// are propagated to the user.int (*unlock)(const struct lfs_config *c);// Minimum size of a block read in bytes. All read operations will be a// multiple of this value.lfs_size_t read_size;// Minimum size of a block program in bytes. All program operations will be// a multiple of this value.lfs_size_t prog_size;// Size of an erasable block in bytes. This does not impact ram consumption// and may be larger than the physical erase size. However, non-inlined// files take up at minimum one block. Must be a multiple of the read and// program sizes.lfs_size_t block_size;// Number of erasable blocks on the device.lfs_size_t block_count;// Number of erase cycles before littlefs evicts metadata logs and moves// the metadata to another block. Suggested values are in the// range 100-1000, with large values having better performance at the cost// of less consistent wear distribution.//// Set to -1 to disable block-level wear-leveling.int32_t block_cycles;// Size of block caches in bytes. Each cache buffers a portion of a block in// RAM. The littlefs needs a read cache, a program cache, and one additional// cache per file. Larger caches can improve performance by storing more// data and reducing the number of disk accesses. Must be a multiple of the// read and program sizes, and a factor of the block size.lfs_size_t cache_size;// Size of the lookahead buffer in bytes. A larger lookahead buffer// increases the number of blocks found during an allocation pass. The// lookahead buffer is stored as a compact bitmap, so each byte of RAM// can track 8 blocks. Must be a multiple of 8.lfs_size_t lookahead_size;// Optional statically allocated read buffer. Must be cache_size.// By default lfs_malloc is used to allocate this buffer.void *read_buffer;// Optional statically allocated program buffer. Must be cache_size.// By default lfs_malloc is used to allocate this buffer.void *prog_buffer;// Optional statically allocated lookahead buffer. Must be lookahead_size// and aligned to a 32-bit boundary. By default lfs_malloc is used to// allocate this buffer.void *lookahead_buffer;// Optional upper limit on length of file names in bytes. No downside for// larger names except the size of the info struct which is controlled by// the LFS_NAME_MAX define. Defaults to LFS_NAME_MAX when zero. Stored in// superblock and must be respected by other littlefs drivers.lfs_size_t name_max;// Optional upper limit on files in bytes. No downside for larger files// but must be <= LFS_FILE_MAX. Defaults to LFS_FILE_MAX when zero. Stored// in superblock and must be respected by other littlefs drivers.lfs_size_t file_max;// Optional upper limit on custom attributes in bytes. No downside for// larger attributes size but must be <= LFS_ATTR_MAX. Defaults to// LFS_ATTR_MAX when zero.lfs_size_t attr_max;// Optional upper limit on total space given to metadata pairs in bytes. On// devices with large blocks (e.g. 128kB) setting this to a low size (2-8kB)// can help bound the metadata compaction time. Must be <= block_size.// Defaults to block_size when zero.lfs_size_t metadata_max;};
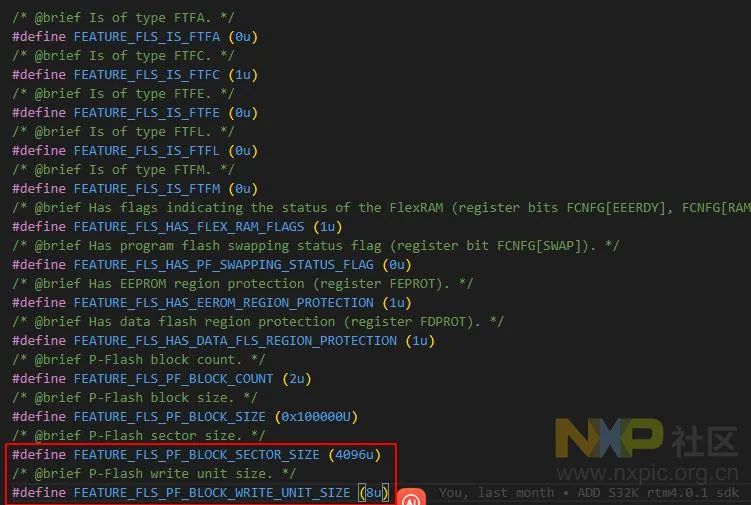
主要包含物理层设备的读写/擦除,及FLASH最小编程块属性配置,查看S32K146 的features 可以知道,最小擦除的sector 为4096字节,最小写操作size 为8字节,我们按照littlefs 依赖的配置结构实现对应的函数。
read 接口实现:
int lfs_mflash_read(const struct lfs_config *lfsc, lfs_block_t block, lfs_off_t off, void *buffer, lfs_size_t size){struct lfs_mflash_ctx *ctx;uint32_t flash_addr;assert(lfsc);ctx = (struct lfs_mflash_ctx *)lfsc->context;assert(ctx);flash_addr = ctx->start_addr + block * lfsc->block_size + off;for(lfs_size_t i=0; i < size; i++){((int8_t *)buffer)[i] = *((__IO int8_t*)flash_addr);flash_addr++;}return LFS_ERR_OK;}
prog接口实现:
int32_t mflash_drv_program(uint32_t addr,uint32_t size,uint8_t * pdata){status_t ret;ret = FLASH_DRV_Program(&pSSDConfig,addr,size,pdata);return ret == STATUS_SUCCESS ? 0 : -1;}int lfs_mflash_prog(const struct lfs_config *lfsc, lfs_block_t block, lfs_off_t off, const void *buffer, lfs_size_t size){struct lfs_mflash_ctx *ctx;uint32_t flash_addr;int32_t ret;ctx = (struct lfs_mflash_ctx *)lfsc->context;flash_addr = ctx->start_addr + block * lfsc->block_size + off;ret = mflash_drv_program(flash_addr,size,(uint8_t *)buffer);return (ret == 0) ? LFS_ERR_OK : LFS_ERR_IO;}
erase 接口实现;
int32_t mflash_drv_erase(uint32_t dest,uint32_t size)
对应的配置结构如下:
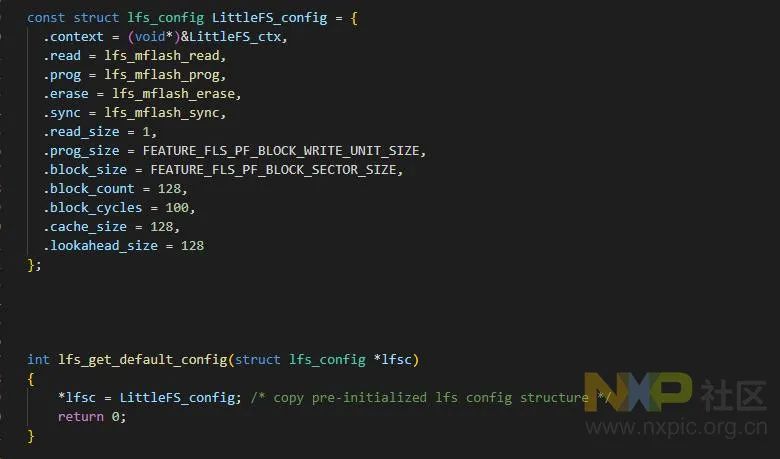
适配接口已经对应完成,littlefs 会依赖动态malloc/free 内存接口,本次是基于RT-thread 系统lfs_util.h需做如下修改:
至此Littfs 依赖的适配接口已经完成,我们追加shell 测试命令来验证littlefs的基本创建删除文件及文件夹及读写删除试验,对应的shell 测试命令代码如下:
/******************************************************************************** Variables******************************************************************************/lfs_t lfs;struct lfs_config cfg;int lfs_mounted;static void format(int argc, char **argv){int res;if (lfs_mounted){SHELL_Printf("LFS is mounted, please unmount it first.\r\n");return;}if (argc != 2 || strcmp(argv[1], "yes")){SHELL_Printf("Are you sure? Please issue command "format yes" to proceed.\r\n");return;}res = lfs_format(&lfs, &cfg);if (res){PRINTF("\rError formatting LFS: %d\r\n", res);}return;}MSH_CMD_EXPORT(format,"lfs format api");static void mount(int argc, char **argv){int res;if (lfs_mounted){SHELL_Printf("LFS already mounted\r\n");return;}res = lfs_mount(&lfs, &cfg);if (res){PRINTF("\rError mounting LFS\r\n");}else{lfs_mounted = 1;}return;}MSH_CMD_EXPORT(mount,lfs mount api);static void unmount(int argc, char **argv){int res;if (!lfs_mounted){SHELL_Printf("LFS not mounted\r\n");return;}res = lfs_unmount(&lfs);if (res){PRINTF("\rError unmounting LFS: %i\r\n", res);}lfs_mounted = 0;return;}MSH_CMD_EXPORT(unmount,lfs unmount api);static void cd(int argc, char **argv){SHELL_Printf("There is no concept of current directory in this example.\r\nPlease always specify the full path.\r\n");return;}MSH_CMD_EXPORT(cd,lfs cd api);static void lls(int argc, char **argv){int res;char *path;lfs_dir_t dir;struct lfs_info info;int files;int dirs;if (!lfs_mounted){SHELL_Printf("LFS not mounted\r\n");return;}if (argc > 2){SHELL_Printf("Invalid number of parameters\r\n");return;}if (argc < 2){path = "/";}else{path = argv[1];}/* open the directory */res = lfs_dir_open(&lfs, &dir, path);if (res){PRINTF("\rError opening directory: %i\r\n", res);return;}PRINTF(" Directory of %s\r\n", path);files = 0;dirs = 0;/* iterate until end of directory */while ((res = lfs_dir_read(&lfs, &dir, &info)) != 0){if (res < 0){/* break the loop in case of an error */PRINTF("\rError reading directory: %i\r\n", res);break;}if (info.type == LFS_TYPE_REG){SHELL_Printf("%8d %s\r\n", info.size, info.name);files++;}else if (info.type == LFS_TYPE_DIR){SHELL_Printf("% DIR %s\r\n", info.name);dirs++;}else{SHELL_Printf("%???\r\n");}}res = lfs_dir_close(&lfs, &dir);if (res){PRINTF("\rError closing directory: %i\r\n", res);return;}PRINTF(" %d File(s), %d Dir(s)\r\n", files, dirs);return;}MSH_CMD_EXPORT(lls,lfs ls api);static void rm(int argc, char **argv){int res;if (!lfs_mounted){SHELL_Printf("LFS not mounted\r\n");return;}res = lfs_remove(&lfs, argv[1]);if (res){PRINTF("\rError while removing: %i\r\n", res);}return;}MSH_CMD_EXPORT(rm,lfs rm api);static void lmkdir(int argc, char **argv){int res;if (!lfs_mounted){SHELL_Printf("LFS not mounted\r\n");return;}res = lfs_mkdir(&lfs, argv[1]);if (res){PRINTF("\rError creating directory: %i\r\n", res);}return;}MSH_CMD_EXPORT(lmkdir,lfs mkdir api);static void write(int argc, char **argv){int res;lfs_file_t file;if (!lfs_mounted){SHELL_Printf("LFS not mounted\r\n");return;}res = lfs_file_open(&lfs, &file, argv[1], LFS_O_WRONLY | LFS_O_APPEND | LFS_O_CREAT);if (res){PRINTF("\rError opening file: %i\r\n", res);return;}res = lfs_file_write(&lfs, &file, argv[2], strlen(argv[2]));if (res > 0)res = lfs_file_write(&lfs, &file, "\r\n", 2);if (res < 0){PRINTF("\rError writing file: %i\r\n", res);}res = lfs_file_close(&lfs, &file);if (res){PRINTF("\rError closing file: %i\r\n", res);}return;}MSH_CMD_EXPORT(write,lfs write api);static void cat(int argc, char **argv){int res;lfs_file_t file;uint8_t buf[16];if (!lfs_mounted){SHELL_Printf("LFS not mounted\r\n");return;}res = lfs_file_open(&lfs, &file, argv[1], LFS_O_RDONLY);if (res){PRINTF("\rError opening file: %i\r\n", res);return;}do{res = lfs_file_read(&lfs, &file, buf, sizeof(buf));if (res < 0){PRINTF("\rError reading file: %i\r\n", res);break;}if(res > 0){buf[res] = '\0';PRINTF("%s",(char *)buf);}} while (res);res = lfs_file_close(&lfs, &file);if (res){PRINTF("\rError closing file: %i\r\n", res);}return;}MSH_CMD_EXPORT(cat,lfs cat api);static void lfsinit(int argc, char **argv){mflash_drv_init();lfs_get_default_config(&cfg);return;}MSH_CMD_EXPORT(lfsinit,lfs init api);static void df(int argc, char **argv){printf("used block %d total %d\r\n",lfs_fs_size(&lfs),cfg.block_count);return;}MSH_CMD_EXPORT(df,lfs init api);
至此准备工作已经完成,我们通过shell 来验证文件系统的功能,shell 命令验证文件系统已经可以通过操作文件文件夹。
视频链接:https://www.nxpic.org.cn/module/forum/data/attachment/forum/202401/28/084053c1f9tfnw98w1q9ww.gif
RT-thread 软件包也有littlefs 的软件包支持,本次实验暂未使用软件包,后续使用RT-thread 软件包来验证littlefs功能。


想要在RT-Thread平台或社区投放内容?或想参与相关直播活动及赛事?RT-Thread已开放对接窗口,请通过邮件与我们取得联系,期待合作!
