
今天给大侠带来基于FPGA的VGA驱动设计,附源码,获取源码,请在“FPGA技术江湖”公众号内回复“VGA驱动设计源码”,可获取源码文件。话不多说,上货。

VGA (Video Graphics Array) 即视频图形阵列,是IBM于1987年随PS/2机(PersonalSystem 2)一起推出的使用模拟信号的一种视频传输标准。这个标准对于现今的个人电脑市场已经十分过时。但在当时具有分辨率高、显示速率快、颜色丰富等优点,在彩色显示器领域取得了广泛的应用,是众多制造商所共同支持的一个低标准。

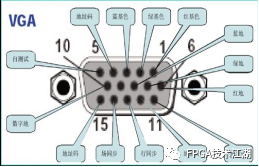
VGA的实体图与接口示意图,如下图所示,它有15个针孔:

在本次设计使用的开发板中,VGA的电路原理图如下图所示:
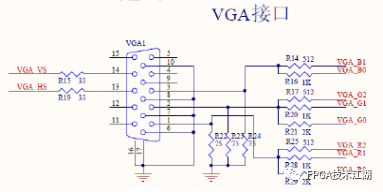
通过原理图,我们不难发现,VGA需要我们控制的接口只有5个:
显示器的扫描规律是什么?本设计采用逐行扫描,逐行扫描是扫描从屏幕左上角一点开始,从左向右逐点扫描,每扫描完一行,电子束回到屏幕的左边下一行的起始位置,在这期间,CRT对电子束进行消隐,每行结束时,用行同步信号进行行同步;当扫描完所有的行,形成一帧,用场同步信号进行场同步,并使扫描回到屏幕左上方,同时进行场消隐,开始下一帧。通过这种扫描规律,很容易看出,在设计两个有效范围计数器时,场同步信号计数器是以行同步信号计数器为周期的。
VGA的显示标准如下表所示:
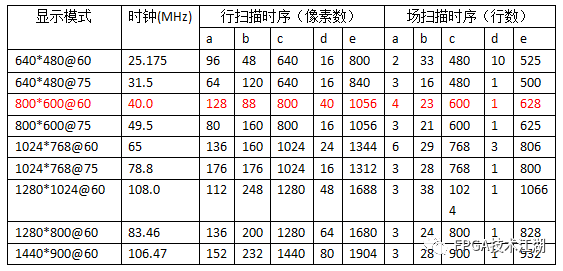
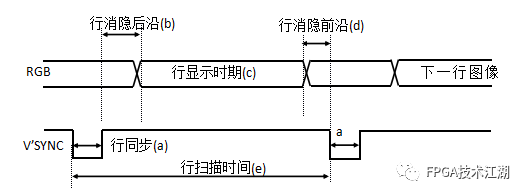
对于普通的VGA显示器都要严格遵循“VGA工业标准”,否则可能会损害VGA显示器,因此我们在设计时VGA控制器时,都需要参考显示器的显示标准,下面是VGA的行扫描时序与场扫描时序:
行扫描时序:
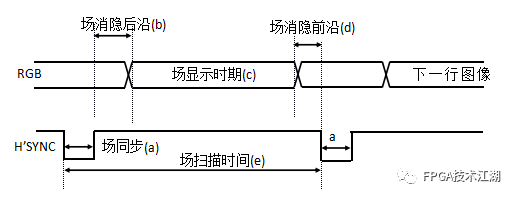
场扫描时序:
根据上述显示器的扫描参数以及扫描时序,例如800*600@60的显示模式,60指得是显示器图像的刷新频率,时钟40MHz指得是一个像素输出的频率。800*600为VGA的分辨率,指有效显示区域为时序中的c段只有800*600,也就是行计数在[216,1016],列计数在[27,627],在这个范围内,给RGB色值才会有效。
在VGA 工业标准显示模式要求:行同步、场同步都为负极性,即同步脉冲要求是负脉冲。行同步信号上电拉高,在行同步计数为0时拉低a个时钟周期,即128,之后拉高,在行同步计数到1055时,行同步计数器清零,场同步计数器加1。在行扫描时序中,扫描计数时,周期就是一个像素点的时间。
场同步信号上电拉高,在场同步计数为0时拉低场同步a个时钟周期,即4,之后拉高,在场同步计数到627时,场同步计数器清零。
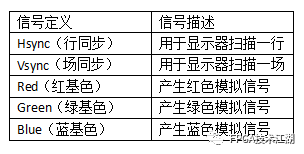
在VGA控制器中,还需要控制三个接口,即三种基色(R、G、B),它们共专用8位,分别是Red为3位,Green为3位,Blue为3位,所以可以显示256种颜色,RGB数据的格式如下表所示:

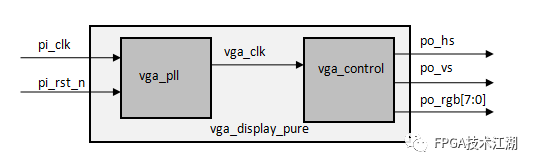
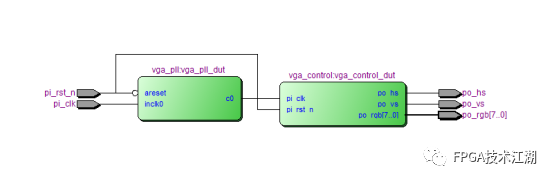
本设计选择的VGA显示标准为800*600@60,实现点亮整个屏幕,并显示为全红。通过分析设计的功能,可以得到如下的顶层架构:
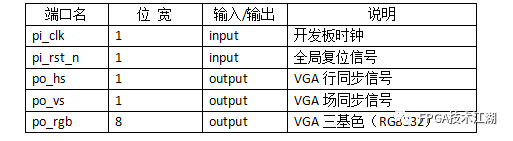
顶层模块端口列表如下:
vga_pll模块是为了满足分辨率800*600@60的时钟为40MHz,而ZX_1开发板的系统时钟为50MHz,通过锁相环,将50MHz转化为40MHz。vga_control模块是为了设定行场同步信号,并标定出有效显示区域,并输出控制颜色的po_rgb信号。为了便于移植,根据800*600@60分辨率下的参数,对其进行参数化定义。
module vga_display_pure (pi_clk, pi_rst_n, po_hs, po_vs, po_rgb);input pi_clk, pi_rst_n; //系统时钟复位output po_vs; //VGA场同步信号output po_hs; //VGA行同步信号output [7:0] po_rgb; //VGA场红绿蓝三基色//----------------VGA时序-----------------------------------// 显示模式 时钟// 800*600@60 40MHz//行/场 同步(a) 消隐后沿(b) 有效显示(c) 消隐前沿(d) 扫描时间(e)//hs 128 88 800 40 1056//vs 4 23 600 1 628wire vga_clk;vga_pll vga_pll_dut(.areset(~pi_rst_n),.inclk0(pi_clk),.c0(vga_clk));vga_control vga_control_dut(.pi_clk(vga_clk),.pi_rst_n(pi_rst_n),.po_hs(po_hs),.po_vs(po_vs),.po_rgb(po_rgb));endmodule
VGA控制器vga_control 模块代码:
module vga_control (pi_clk, pi_rst_n, po_hs, po_vs, po_rgb);input pi_clk, pi_rst_n; //系统时钟复位output reg po_vs; //VGA场同步信号output reg po_hs; //VGA行同步信号output [7:0] po_rgb; //VGA场红绿蓝三基色//----------------VGA时序-----------------------------------显示模式 时钟800*600@60 40MHz同步(a) 消隐后沿(b) 有效显示(c) 消隐前沿(d) 扫描时间(e)128 88 800 40 10564 23 600 1 628行(Horizontal)扫描 Parameter (像素)parameter H_A = 128;parameter H_B = 80;parameter H_C = 800;parameter H_D = 40;parameter H_E = 1056;场(Vertical)扫描 Parameter (行数)parameter V_A = 4;parameter V_B = 23;parameter V_C = 600;parameter V_D = 1;parameter V_E = 628;reg [10:0] hcnt;always @ (posedge pi_clk or negedge pi_rst_n)beginif (!pi_rst_n)hcnt <= 11'd0;elsebeginif (hcnt == (H_E - 1'b1)) //扫描完一行像素hcnt <= 11'd0;elsehcnt <= hcnt + 1'b1;endend//场扫描计数器reg [10:0] vcnt;always @ (posedge pi_clk or negedge pi_rst_n)beginif (!pi_rst_n)vcnt <= 11'd0;else if (vcnt == (V_E - 1'b1))vcnt <= 11'd0;else if (hcnt == (H_E - 1'b1))vcnt <= vcnt + 1;end//行同步输出always @ (posedge pi_clk or negedge pi_rst_n)beginif (!pi_rst_n)po_hs <= 1'b1;else if (hcnt < H_A)po_hs <= 1'b0;elsepo_hs <= 1'b1;endpo_hs = (hcnt <= H_A - 1'b1) ? 1'b0 : 1'b1;//场同步输出always @ (posedge pi_clk or negedge pi_rst_n)beginif (!pi_rst_n)po_vs <= 1'b1;else if (vcnt < V_A)po_vs <= 1'b0;elsepo_vs <= 1'b1;endpo_vs = (vcnt <= V_A - 1'b1) ? 1'b0 : 1'b1;wire rgb_en;assign rgb_en = (hcnt >= H_A + H_B && hcnt < H_A + H_B + H_C) &&>= V_A + V_B && vcnt < V_A + V_B + V_C) ? 1'b1 : 1'b0;assign po_rgb = rgb_en ? 8'b111_000_00 : 8'b0000_0000;endmodule
通过编译后生成的RTL视图如下:
为了验证本设计的逻辑正确性,我们先对其进行了仿真,在仿真时,为了减少仿真的时间,先将行、场扫描的对应参数,进行了缩放,这样不仅节约了仿真时间,同时由于扫描数据量变少,更加便于分析观察。其仿真代码所示:
1ns/1ps //仿真时间精度时间单位module vga_display_pure_tb;reg pi_clk, pi_rst_n; //系统时钟复位wire po_vs; //VGA场同步信号wire po_hs; //VGA行同步信号wire [7:0] po_rgb; //VGA场红绿蓝三基色//初始化数据,并附相应初值initial beginpi_clk = 0;pi_rst_n = 0;#200.1 pi_rst_n = 1;endvga_display_pure vga_display_pure_inst (.po_vs(po_vs),.po_rgb(po_rgb));always #10 pi_clk = ~pi_clk; //50MHz时钟描述endmodule
仿真图:
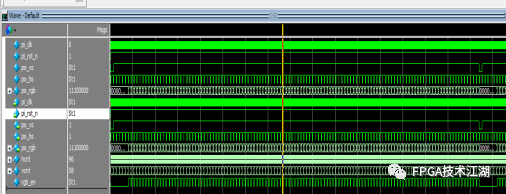
rgb_en信号,只有当po_vs和po_hs同时为高电平时,才有效,并且有po_rgb Red基色信号输出,时序仿真细节图如下所示:

通过观察和分析时序图,可以发现与设计吻合,接下来则可进行管脚分配,并下板验证,验证结果如下:


END
往期精选



FPGA技术江湖广发江湖帖
无广告纯净模式,给技术交流一片净土,从初学小白到行业精英业界大佬等,从军工领域到民用企业等,从通信、图像处理到人工智能等各个方向应有尽有,QQ微信双选,FPGA技术江湖打造最纯净最专业的技术交流学习平台。
FPGA技术江湖微信交流群

加群主微信,备注姓名+学校/公司+专业/岗位进群
FPGA技术江湖QQ交流群

备注姓名+学校/公司+专业/岗位进群

