
今天给大侠带来基于FPGA的USB2.0设计,附源码,获取源码,请在“FPGA技术江湖”公众号内回复“ USB2.0设计源码”,可获取源码文件。话不多说,上货。
2019年9月4日,USB-IF终于正式公布USB 4规范。它引入了Intel此前捐献给USB推广组织的Thunderbolt雷电协议规范,双链路运行(Two-lane),传输带宽因此提升,与雷电3持平,都是40Gbps。需要注意的是,你想要体验最高传输速度,就必须使用经过认证的全新数据线。USB4保留了良好的兼容性,可向下兼容USB 3.2/3.1/3.0、雷电3。除此之外,USB4将只有USB Type-C一种接口,并支持多种数据、显示协议,包括DisplayPort,可以一起充分利用高速带宽,也支持USB PD供电。
比较遗憾的是,USB4的发布时间暂未公布。值得注意的是,此次发布的USB4是规范,而并非USB4.0。在此之前,USB Implementers Forum(USB-IF)计划取消USB 3.0/3.1命名,统一划归为USB 3.2。其中USB 3.0更名USB 3.2 Gen 1(5Gbps),USB 3.1更名USB 3.2 Gen 2(10Gbps),USB 3.2更名为USB 3.2 Gen 2x2(20Gbps)。
以上就是关于USB标准以及命名的讯息,而今天我们要做设计的是USB2.0,USB2.0的设备是按照2.0的电源标准设计的,设备所需的电流小于500mA,而USB3.0接口可以提供更大的电流,所以用在USB3.0接口是安全的,这就是标准向下兼容的道理。反之,USB3.0的设备,是否能够在USB2.0接口使用,就要查看设备的说明书。通常的电源都是电压源,设备与电源的电压必须相等,而电源的输出电流要大于设备的电流,即电源功率要大于设备功率。
现在大部分USB设备(比如USB接口的鼠标、键盘、闪存、U盘等等)都是采用了USB通用驱动,而你的系统有USB通用驱动的话(比如XP就内建了USB通用驱动)就能用。而有些USB设备是需要特殊驱动的,比如某些手机,连接到电脑的USB口,是需要安装驱动才能使用的。下面我们一起动手做一做,了解一下如何设计。

USB(Universal Serial Bus2.0,通用串行总线)是一种应用在计算机领域的新型接口技术。USB接口具有传输速度更快,支持热插拔以及连接多个设备的特点。目前已经在各类外部设备中广泛的被采用。USB接口有三种:USB1.1,USB2.0和USB3.2。理论上USB1.1的传输速度可以达到12Mbps,而USB2.0则可以达到速度480Mbps,并且可以向下兼容USB1.1。
本次设计我们选择一款开发设备,一块廉价的开发板,其中的USB芯片是Cypress的FX2LP系列中的CY7C68013A代,详细的介绍大家可以去Cypress的官网查询。下面简述一下设计思路。
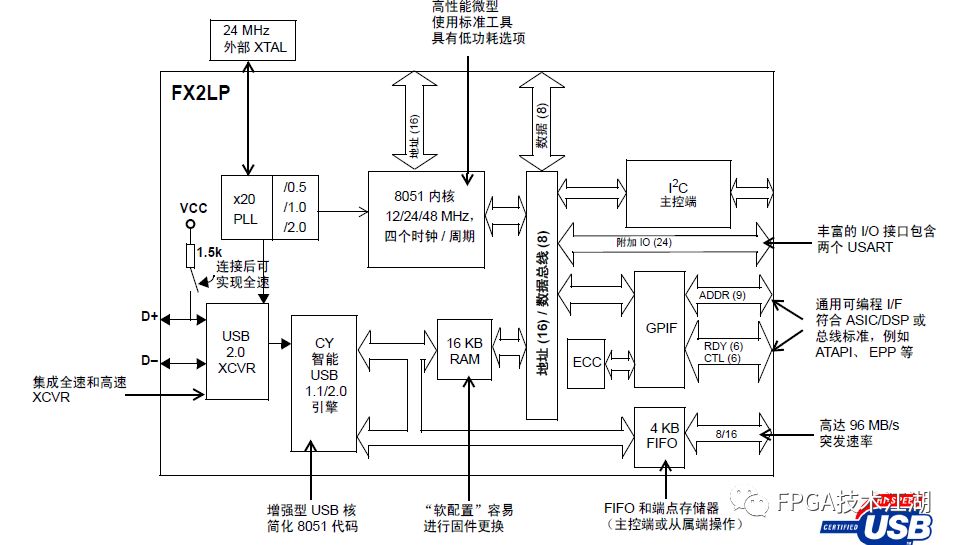
FX2的设计架构如下图,内嵌480MBit/s的收发器,锁相环PLL,串行接口引擎SIE——集成了整个USB 2.0协议的物理层。为适应USB 2.0的480MBit/s的速率,FIFO端点可配置成2,3,4个缓冲区。配置用的是“软配置”——USB固件可由USB总线下载,片上不需集成ROM。拥有四个FIFO接口,可工作在内部或外部时钟下。端点和FIFO接口的应用使外部逻辑和USB总线可高速连接。
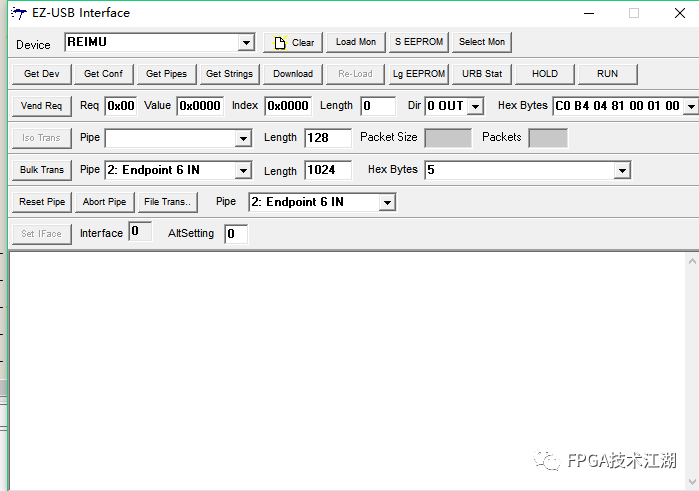
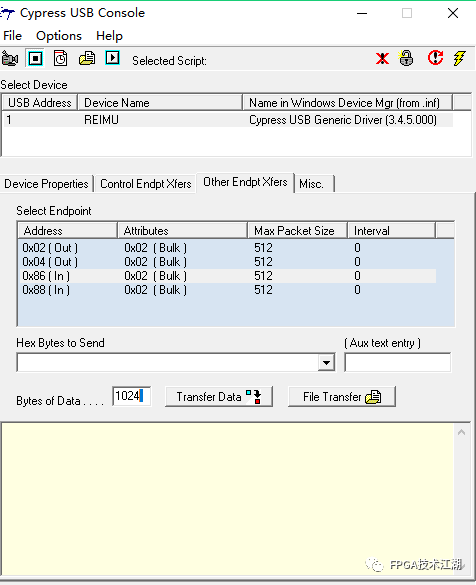
这里的项目设计要求是要把FX2配置成从FIFO的模式, 配置为单片机工作时钟24M,端点2输出,字节1024,端点6输入,字节1024,信号全设置为低电平有效等。模块驱动时钟配置成内部输出时钟,也就是让FX2给项目设计当作时钟源,输出一个最大的配置时钟48M的时钟。FX2的数据存储区叫端点,有512、1024字节两个存储大小之分。
当有一个与FX2芯片相连的外部逻辑只需要利用FX2做为一个USB 2.0接口而实现与主机的高速通讯,而它本身又能够提供满足Slave FIFO要求的传输时序,可以做为Slave FIFO主控制器时,即可考虑用此传输方式。
Slave FIFO传输的示意图如下:
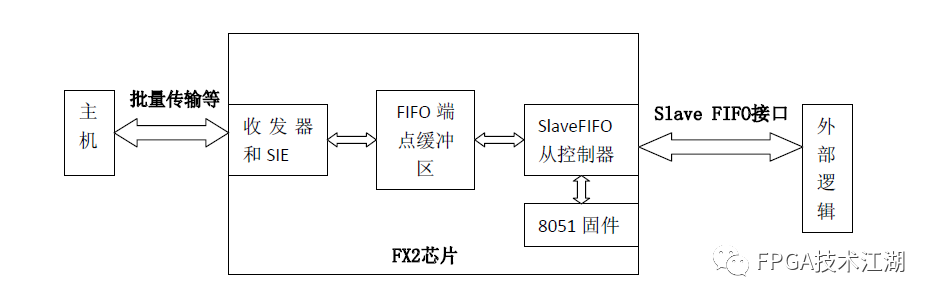
在这种方式下,FX2内嵌的8051固件的功能只是配置Slave FIFO相关的寄存器以及控制FX2何时工作在Slave FIFO模式下。一旦8051固件将相关的寄存器配置完毕,且使自身工作在Slave FIFO模式下后,外部逻辑(如FPGA)即可按照Slave FIFO的传输时序,高速与主机进行通讯,而在通讯过程中不需要8051固件的参与。
FX2系列的有3种封装方式,我们我的开发板用的是56引脚的封装方式的电路图,其电路图如下所示:
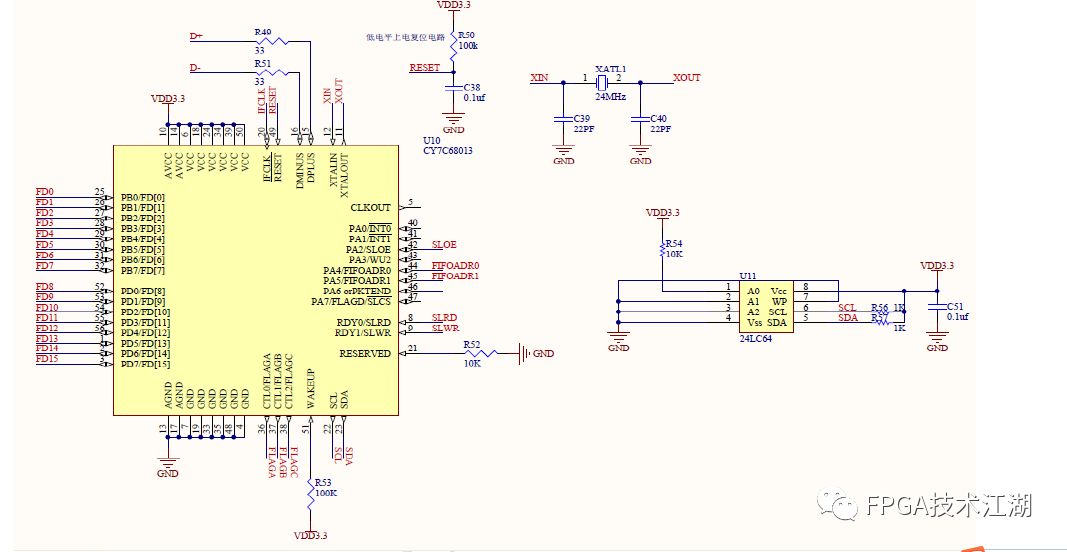
IFCLK:FX2输出的时钟,可做为通讯的同步时钟。
SLCS:FIFO的片选信号,外部逻辑控制,当SLCS输出高时,不可进行数据传输。
SLOE:FIFO输出使能,外部逻辑控制,当SLOE无效时,数据线不输出有效数据。
SLRD:FIFO读信号,外部逻辑控制,同步读时,FIFO指针在SLRD有效时的每个IFCLK的上升沿递增。
SLWR:FIFO写信号,外部逻辑控制,同步写时,在SLWR有效时的每个IFCLK的上升沿时数据被写入,FIFO指针递增。
FD[15:0]:数据线。
FIFOADR[1:0]:选择四个FIFO端点的地址线,外部逻辑控制。
FLAG A,B,C端点的空满标志位。
开发驱动大家可以在网上找,然后根据自己系统装上合适的驱动。上位机软件用的是官方的开发工具,只有如下的安装包,然后安装第一个和第二个就好了。

总模块usb:
module usb(pi_clk, clk, pi_rst_n, pi_usb_flagb, pi_usb_flagc, pio_usb_data,po_usb_oe_n, po_usb_wr_n, po_usb_address, po_usb_rd_n, led);input clk;input pi_clk;input pi_rst_n;input pi_usb_flagb;input pi_usb_flagc;inout [15:0] pio_usb_data;output po_usb_oe_n;output po_usb_wr_n;output po_usb_rd_n;output [1:0] po_usb_address;output led;wire po_rst_n;delay delay_dut(.pi_clk(pi_clk),.pi_rst_n(pi_rst_n),.po_rst_n(po_rst_n));usb_wr wr_dut(.pi_clk(pi_clk),.pi_rst_n(po_rst_n),.pi_usb_flagb(pi_usb_flagb),.pi_usb_flagc(pi_usb_flagc),.pio_usb_data(pio_usb_data),.po_usb_oe_n(po_usb_oe_n),.po_usb_wr_n(po_usb_wr_n),.po_usb_address(po_usb_address),.po_usb_rd_n(po_usb_rd_n));my_pll my_pll_inst (.areset ( ~ pi_rst_n ),.inclk0 ( clk ),.c0 ( c0_sig ),.locked ( locked_sig ));endmodule
读模块usb_rd:
module usb_rd(pi_clk, pi_rst_n, pi_usb_flagb, pi_usb_flagc, pio_usb_data,po_usb_oe_n, po_usb_rd_n, po_usb_address, po_usb_wr_n, led);input pi_clk;input pi_rst_n;input pi_usb_flagb; //端点2标志信号input pi_usb_flagc; //端点6标志信号inout [15:0] pio_usb_data; //输入输出端口output reg po_usb_oe_n; //读标志信号output reg po_usb_rd_n; //写使能output reg po_usb_wr_n; //读使能output reg [1:0] po_usb_address; //端点地址选择output reg led;reg [15:0] temp_data;reg [9:0] count;reg [2:0] state;assign pio_usb_data = (state == 10) ? 1 : 16'hzzzz; //读数据,可以一直释放数据总线的控制权always @ (posedge pi_clk or negedge pi_rst_n)if(!pi_rst_n)beginstate <= 0;po_usb_oe_n <= 1;po_usb_rd_n <= 1;count <= 0;po_usb_wr_n <= 1;temp_data <= 0;endelsecase (state)0 : state <= 1;1 : beginpo_usb_address <= 2'b00; //地址指向端点2state <= 2;end2 : if(!pi_usb_flagb) //判断端点2已经满beginpo_usb_rd_n <= 0;state <= 3;po_usb_oe_n <= 0;endelsestate <= 2;3 : beginif(count < 512 - 1) //接收1024字节的数据begincount <= count + 1'b1;endelsebegincount <= 0;state <= 4;endif (count == 2)begintemp_data <= pio_usb_data;endend4 : beginpo_usb_rd_n <= 1;po_usb_oe_n <= 1;state <= 0;enddefault: state <= 0;endcasealways @ (*)if(!pi_rst_n)led <= 1;else if (temp_data == 16'h33ff)led <= 0;endmodule
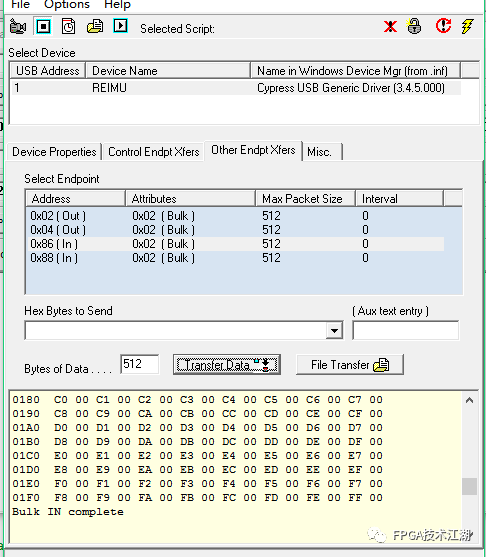
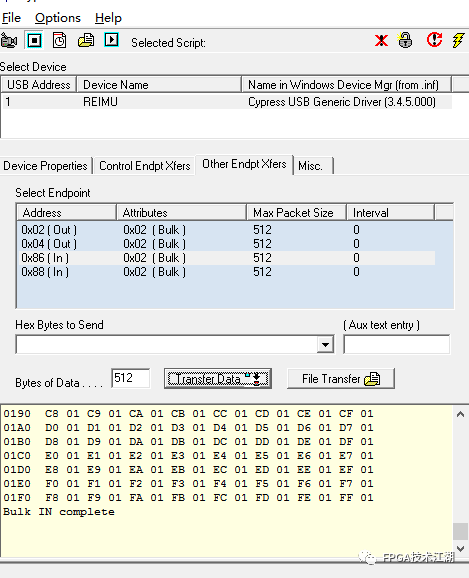
写模块 usb_wr:
module usb_wr(pi_clk, pi_rst_n, pi_usb_flagb, pi_usb_flagc, pio_usb_data,po_usb_oe_n, po_usb_wr_n, po_usb_address, po_usb_rd_n);input pi_clk;input pi_rst_n;input pi_usb_flagb; //端点2标志信号input pi_usb_flagc; //端点6标志信号inout [15:0] pio_usb_data; //输入输出端口output reg po_usb_oe_n; //读标志信号output reg po_usb_wr_n; //写使能output reg po_usb_rd_n; //读使能output reg [1:0] po_usb_address; //端点地址选择reg [15:0] temp_data;reg [2:0] state;//在状态的3,拿回数据总线控制全,给写入数据assign pio_usb_data = (state == 3) ? temp_data : 16'hzzzz;always @ (posedge pi_clk or negedge pi_rst_n)if(!pi_rst_n)beginstate <= 0;po_usb_oe_n <= 1;po_usb_wr_n <= 1;temp_data <= 0;po_usb_rd_n <= 1;endelsecase (state)0 : state <= 1;1 : beginpo_usb_address <= 2'b10; //地址指向端点6state <= 2;end2 : if(!pi_usb_flagc) //判断端点6已经空beginpo_usb_wr_n <= 0;state <= 3;endelsestate <= 2;3 : if(temp_data < 512 - 1) //发送1024字节的数据temp_data <= temp_data + 1'b1;elsebegintemp_data <= 0;state <= 4;end4 : beginpo_usb_wr_n <= 1;state <= 0;enddefault: state <= 0;endcaseendmodule
延时模块 delay:
module delay(pi_clk, pi_rst_n, po_rst_n);input pi_clk;input pi_rst_n;output reg po_rst_n;parameter T1ms = 50000;reg [15:0] count;always @ (posedge pi_clk or negedge pi_rst_n)if(!pi_rst_n)begincount <= 0;po_rst_n <= 0;endelsebeginif(count < T1ms - 1)count <= count + 1;elsebegincount <= count;po_rst_n <= 1;endendendmodule
- THE END -
往期精选



FPGA技术江湖广发江湖帖
无广告纯净模式,给技术交流一片净土,从初学小白到行业精英业界大佬等,从军工领域到民用企业等,从通信、图像处理到人工智能等各个方向应有尽有,QQ微信双选,FPGA技术江湖打造最纯净最专业的技术交流学习平台。
FPGA技术江湖微信交流群

加群主微信,备注姓名+学校/公司+专业/岗位进群
FPGA技术江湖QQ交流群

备注姓名+学校/公司+专业/岗位进群

