

 来源:恒旭资本
来源:恒旭资本
作为高带宽、低延时的数据传输方案,车载SerDes在满足高级别自动驾驶对摄像头数据传输需求、座舱屏幕高分辨率视频传输等方面具有独特优势,且正向更高传输速率(12Gbps及以上)发展。产业链方面,车载SerDes多采用Fabless模式,上游涉及EDA软件和IP厂商,下游覆盖汽车厂商和通信领域。
SerDes,是串行器(Serializer)和解串器(Deserializer)的缩写,作为一种高速串行数据传输技术,主要由发射端(Tx)、接收端(Rx)、时钟模块(PLL)以及传输信道四大模块组成。
发射端的串行器会把多路低速的并行数据转换成一路高速的串行数据,通过高带宽高线性度的驱动器(Driver)将模拟信号转变为数字信号并射出去,同时借助前馈均衡器FFE对信道造成的发送端信号衰减予以补偿,最后经由信道传输到接收端。
接收端接收串行信号后,信号均衡模块(连续时间线性均衡CTLE、判决反馈均衡DFE)会提升信噪比,时钟恢复电路(CDR)则会消除数据传输过程引入的数据抖动,最终由解串器处理成并行信号,并把模拟信号转化为数字信号。
时钟模块在发射端提供低抖动的时钟,在接收端通过CDR从接收到的数据信号中提取时钟信息。
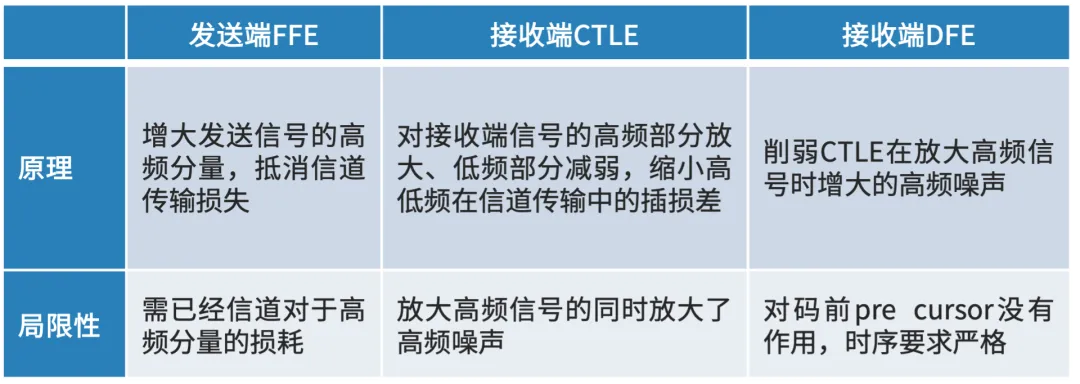
Serdes关键技术之一是均衡模块(FFE+CTLE+DFE)。在数据传输过程中,信道的衰减会随频率变化,高、低频信号的衰减差会导致码间干扰(ISI),直接影响数据可靠性。在SerDes中,FFE、CTLE、DFE各有优劣且相互补充,需要设计每个模块的自适应均衡参数、并指定各个模块间的联合均衡策略,这也是各家私标协议的核心技术之一。
图1:典型SerDes架构
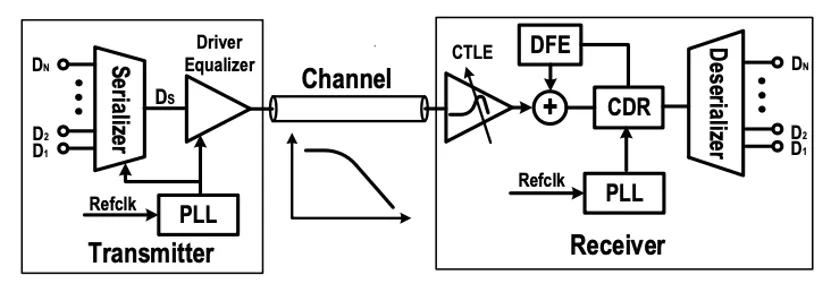
图2:各均衡模块作用及局限性
数据来源:互联网,恒旭资本整理
与其他模拟芯片类似,车载Serdes设计企业大多采用Fabless模式。其上游主要为EDA(Electronic Design Automation)等集成电路设计软件厂商和IP厂商,芯片设计企业将设计的集成电路交由合作的晶圆厂代工制造,再经封测厂商封装、测试后,交付下游汽车、通信等领域厂商。
近年来,随着汽车智能驾驶等级逐渐提高、智能座舱交互功能日益丰富,以及汽车的电子电气架构不断演进,对车内数据传输的高带宽、低延时提出了更高要求。
在智能驾驶方面,智驾等级的提高促使车载摄像头的数量与分辨率迅速增长。现阶段L2及L2+等级,平均搭载摄像头在8个左右,高等级的自动驾驶L4、L5预计会达到12个以上。近年来,蔚来ET7、极氪001、理想L9、零跑C01等新车平均搭载摄像头已超过10颗,叠加各车企硬件冗余性要求,车载摄像头的单车搭载量快速上升的同时,像素也在持续提升。以800W像素摄像头为例,在高速无损无延迟传输的情况下,每秒钟产生的数据量高达5.75Gbps。
在智能座舱方面,车内信息显示方式和人机交互方式的革新,以及车载信息娱乐需求的不断增长,使得座舱屏幕数量、尺寸和分辨率均呈现快速增长态势,对屏幕数据传输的带宽、延时的要求逐渐增加。
ADAS摄像头与ECU的通信、车内娱乐系统人机互动和多屏交互,都带来高带宽、低延时的车载数据传输需求,但传统汽车的CAN总线为主、Lin总线为辅的Mbps级车载内部通信网络难以满足,车载SerDes是当前市场上唯一可以满足如此高带宽数据实时传输的车载方案。
车载SerDes目前的应用场景主要为座舱屏幕和摄像头的大带宽数据传输,在车上通常成对使用,摄像头里一颗作为发射端,控制器ECU里一颗作为接收端,车载屏幕之间的数据传输使用情况相似。除了上述应用场景外,还希望在毫米波雷达中代替CAN、在激光雷达中代替以太网,但是目前被主流客户接受的程度有限,短期内较难实现大规模应用。
车载SerDes技术在自动驾驶领域的应用非常广泛,具体包括以下几个方面:
摄像头系统:在自动驾驶和高级驾驶辅助系统(ADAS)中,SerDes技术用于将车载摄像头采集的视频数据高速传输至中央处理单元,以实现实时图像处理和分析。
雷达系统:SerDes技术同样用于将雷达传感器的数据快速传输至计算单元,提升车辆对周围环境的感知能力。这对于自动驾驶中障碍物检测和避让功能尤为重要。
显示器:SerDes技术将高分辨率视频信号从主控芯片传输至仪表盘、后视镜显示器等,确保驾驶员获得清晰的信息展示。
数据融合:SerDes技术还用于将来自不同传感器(如摄像头和雷达)的数据进行融合,提升环境感知的准确性和可靠性,为自动驾驶提供支持。
车载通信:在车载网络中,SerDes技术与传统的CAN、LIN等协议结合,可以实现更高的数据传输速率。
高速数据传输应用:在数据中心和云计算环境中,SerDes技术被广泛用于实现高速数据传输,提高数据处理效率。虽然这主要与数据中心相关,但也间接推动了自动驾驶技术的发展。
图3:自动驾驶架构框图
Serdes/MIPI A-PHY承担了自动驾驶ADAS芯片与摄像头之间的高速数据互联
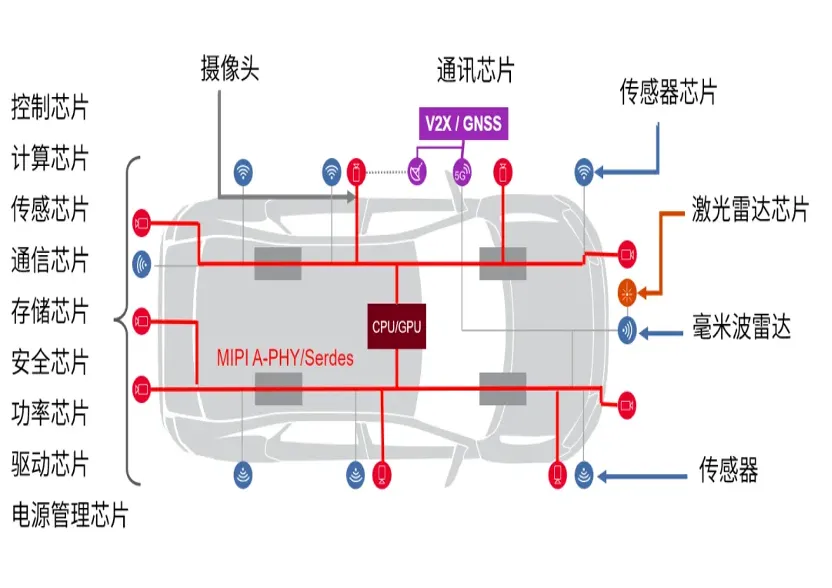
数据来源:恒旭资本整理
1. 车载场景要求:
1)复杂的电磁环境—ESD设计:车载SerDes需设计静电放电二极管(ESD)预防电缆累积的电荷冲击,且ESD选型要注意与ADAS等系统兼容情况;
2)高可靠性—前向纠错技术:提供冗余数据位来恢复传输过程中的错误;
3)反向通信—back channel:车载SerDes需要支持高速正向和反向同时传输,需要在Tx、Rx端分别叠加一个低速Rx、Tx并控制信噪比。
2. 向更高速度发展趋势:SerDes技术的发展以更高速率为主,目前业界量产的最先进的SerDes速率112Gbps,主要应用于数据中心。对于车载SerDes而言,技术形式上和数据中心一致,传输速率上正从3-6Gbps向12Gbps发展,预计在2027或2028年可能出现24Gbps产品。
3. 技术难度与系统级要求特点:虽然车载产品的传输速率远低于数据中心产品,但车载 SerDes 需要增加反向通信技术和前向纠错等车载常用技术,并且需要满足量产成本(特别是线束成本)和车内安全可靠性的要求。因此,其技术难度虽然不及数据中心,但在系统级实现和量产工程化能力方面的要求却高于数据中心。
4. 技术路径差异:常用的SerDes数据编码方式为NRZ和PAM4两种,两种技术各有优劣,且Maxim、TI等企业尚存在方案差异,技术路径尚未统一。
1. 数据传输速率
摄像头数据:对于高分辨率摄像头,选择支持至少6 Gbps的GMSL或MIPI DSI,以确保数据能够实时传输而不会丢失。雷达数据:雷达通常对带宽要求较低,可以选择FPD-Link或Ethernet AVB,数据速率在1 Gbps左右足以满足需求。
2. 供电方式
GMSL支持Power over Coax(通过同轴电缆供电),可以简化布线,适合于多摄像头的设计,减少电缆数量。FPD-Link通常需要独立的电源线,适合于需要较短传输距离的应用。
3. 传输距离
GMSL支持较长的传输距离(可达15米),适合于车辆内不同位置的摄像头安装。FPD-Link适用于距离较短的应用(如几米范围内),可有效降低成本。
4. 成本与复杂性
MIPI DSI在成本和复杂性上较低,适合于较简单的系统。Ethernet AVB虽然提供更高的带宽和灵活性,但其成本和复杂性相对较高,适合对实时性和可靠性要求极高的系统。
智慧驾驶域:当前,自动辅助驾驶(ADAS)加速渗透,推动汽车传感器市场高速增长。高清像素传感器是ADAS的关键组成部分,主要包括毫米波雷达、车载摄像头以及超声波雷达。随着自动驾驶等级的提高,对传感器的数量和质量也提出了更高的要求。(8MP摄像头30帧情况下,所需SerDes带宽大于5.76Gbps即可)
智能座舱域:智能座舱中配备了全液晶仪表、车载娱乐信息系统、车联网模块、抬头显示、流媒体后视镜等各类电子设备。极致流畅的流媒体体验是人机交互的中枢和基础。整车电子电器架构从分布式朝着集中式演变,控制器数量减少,成本降低。同时,“一芯多屏”的流媒体系统也带来长距离、大带宽、高可靠的数据传输需求。(4K@60Hz屏幕的SerDes需要12Gbps带宽)
图4:车规SerDes芯片在汽车中的应用和发展方向
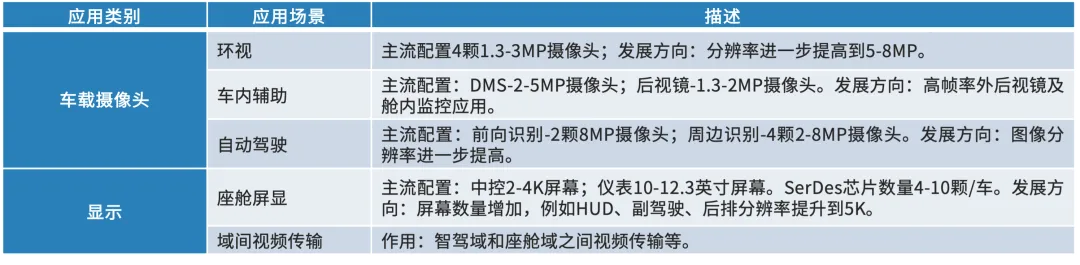
数据来源:恒旭资本整理
 18个专栏共计500多份报告
18个专栏共计500多份报告
推荐阅读
2025年中国汽车市场展望报告-对明年市场竞争的判断及建议
2024年汽车智能座舱投融资研究白皮书
2024智能汽车端到端技术研究报告
2024年汽车操作系统趋势及TOP10分析报告TOP
2024年汽车HUD发展趋势和TOP10分析报告
2024年增强现实抬头显示AR-HUD白皮书
2024推进汽车软件行业合作报告
2024东风集团深度研究报告
2023智能网联汽车远程升级 OTA发展现状及建议
2023年中国智能网联汽车自动驾驶仿真测试白皮书
小鹏汽车:智能驾驶元年,智驾领先者启航
吉利汽车:转型如火如荼,高端化势如破竹
从华为看智能汽车:探寻华为车BU 盈利模式
中国智能汽车车载计算芯片产业报告
辅助驾驶芯片龙头,高阶智驾因机以发
自动驾驶Linux系统功能安全研究报告1.0
中国新能源汽车制造集群和企业选址专题报告
智能底盘操作系统白皮书
面向2025乘用车智能底盘产品平台
集中式EE架构在软件定义汽车中的应用
智能电动汽车EE架构的演进路线
长城汽车发展战略研究报告
奇瑞汽车发展战略研究报告
吉利汽车发展战略研究报告
理想汽车发展战略研究报告
比亚迪成功发展模式研究
华为汽车发展战略研究报告
长安汽车深度研究报告
小米汽车发展战略研究报告
汽车智驾与人形机器人
理想汽车:智驾打开成长新空间
未来移动出行升级下一代整车电网
中国新能源汽车企业在欧发展报告

