近期宇树科技获得了发明专利《一种机器人集成关节单元及应用其的足式机器人》和实用新型专利《一种人形机器人的腿部动力结构和人形机器人》的授权。Tips:专利源文件已经上传至知识星球,加入即可下载;本文主要是小编根据专利内容所做的粗略的总结,由于水平有限,内容仅供参考,具体请参考专利原文。图片来源:CN 109941369 B
本专利提出了一种创新性的机器人集成关节单元及其应用于足式机器人的方案,通过将双电机布置在同一侧,结合力矩限制器和无线传输组件,解决了传统设计中线缆易损、结构复杂的问题。这一设计不仅延长了线材的使用寿命,提高了系统的可靠性和集成度,还增强了机器人的适应能力和工作性能。此发明特别适合用于结构紧凑、要求高可靠性的足式机器人领域,代表了机器人关节技术的一个重要进步。
丨技术背景
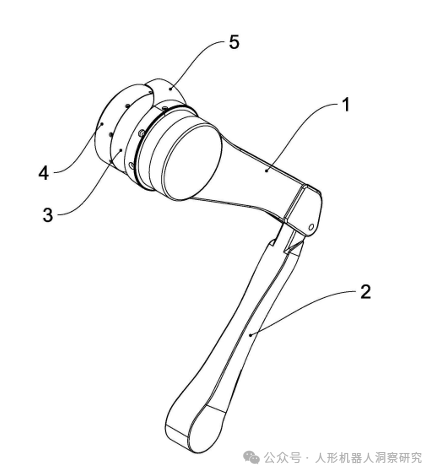
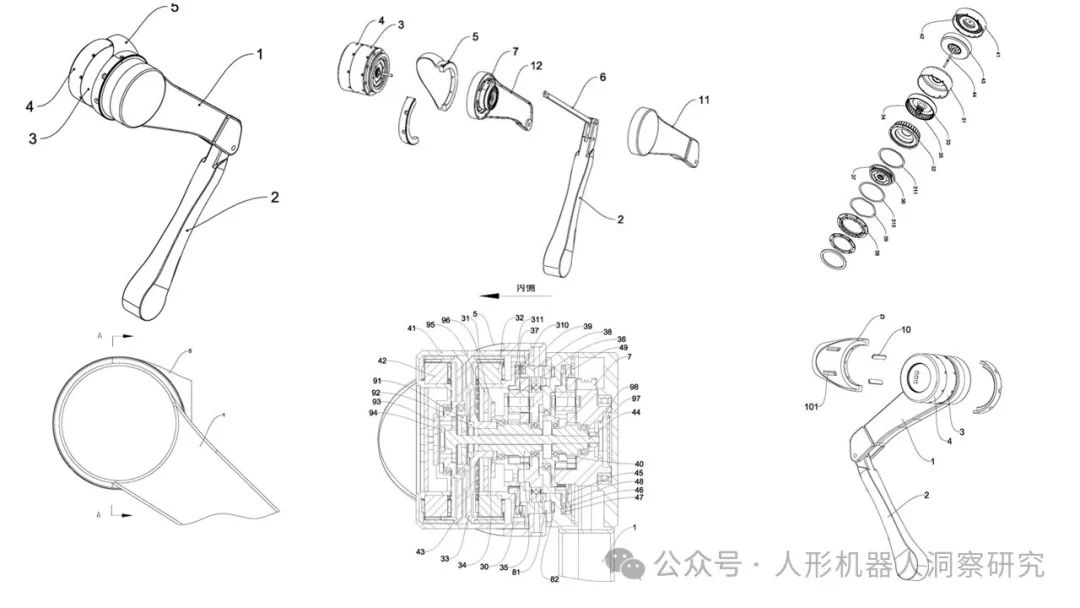
目前,用于机器人的动力单元,一般采用独立的关节单元串联或并联等的结构。尤 其是足式机器人领域,机器人的每条腿通常是使用独立的关节单元串联的结构。对于结构要求紧凑的双关节单元,尤其是用于足式机器人的场合,现有双关节单 元的两个电机布置在回转关节的两侧,为了确保双电机的正常运转,必须考虑线路布置方 式。现有的线路布置方式主要两种:一种是采用非中空走线的方式,线材直接外挂在 机器人关节外面,但影响机器人结构安全以及美观,并且线材很容易损坏,同时如果线路布 置不合理的话,会影响关节的活动范围;另一种采用中空走线的方式,但电机组件及关节连 杆需要预留专门的穿线孔以及线缆安置机构,增加了关节的复杂性以及空间尺寸,同时关 节的运动会对线材造成磨损和疲劳损伤,影响线材的使用寿命。 进一步,由于地面的地形复杂多变或来自外界的冲击干扰力,当机器人关节电机 的驱动力矩大于关节减速器能够承受的最大力矩或者来自外界的通过减速器输出轴传递 到减速器的最大力矩大于关节减速器能够承受的最大力矩时,机器人关节的减速器将处于 超负荷工作状态,将导致减速器齿轮等关节零部件损坏。并且,由于很多工况下机器人关节 长时间工作于往复模式,并且需要承担来自地面或外部环境的冲击载荷,故其减速器各齿 的啮合齿面会出现较为严重的磨损不均匀现象。该专利旨在解决现有技术中机器人关节单元线路布置方式影响结构安全及美观,且容易损坏线材、缩短使用寿命的问题。具体来说,传统的双关节单元两个电机布置在回转关节的两侧,这导致了动力线缆必须穿过关节,从而加速了线缆的疲劳损坏。此外,这种布置方式增加了关节复杂性,限制了关节活动范围,并对线缆造成了磨损和疲劳损伤。双电机同侧布置:将双电机设置于关节同一侧,避免了电机动力线缆需要穿过关节,减少了线缆损坏的风险。力矩限制器的应用:第一电机及减速器总成以及第二减速器总成分别配有力矩限制器,以防止减速器承受过大力矩而受损,适用于多种复杂工况。无线传输组件:引入无线电能传输组件和无线信号传输组件,实现了电能与信号的无线传输,省去了关节跨接线缆,同时实现了关节的连续旋转,增大了工作空间。紧凑可靠的结构设计:通过优化设计,使得电机组件及关节连杆不需要预留专门的穿线孔以及线缆安置机构,提高了结构的可靠性和集成度,降低了轴向尺寸,提升了美观度。延长线材寿命:由于双电机同侧布置,避免了线缆穿过关节,有效减缓了线缆的疲劳损坏,延长了线材的使用寿命。增强可靠性:力矩限制器的存在确保了即使在外部冲击载荷下,减速器等关键部件也不会因过载而损坏,增强了系统的可靠性。提升集成度:紧凑的设计和无线传输组件的应用不仅简化了结构,还提升了整个关节单元的集成度,使其更加小巧轻便。提高工作效率:采用外转子电机和行星减速器等高效传动元件,保证了高效率的动力传递和响应速度图中:1、第一输出连杆;11、第一壳体;12、第二壳体;2、第二输出连杆;3、第一电机
及减速器总成;30、第一减速器总成;31、第一电机壳体;32、第一电机定子及绕组;33、第一
电机转子;34、第一输出轴;35、第一太阳齿轮;36、第一行星齿轮;37、第一内齿圈;38、第一
电机基座;39、第一摩擦力生成器;310、第一盘垫;311、第一摩擦盘;4、第二电机总成;40、第
二减速器总成;41、第二电机壳体;42、第二电机定子及绕组;43、第二电机转子;44、第二输
出轴;45、第二摩擦力生成器;46、第二摩擦盘;47、第二盘垫;48、第二内齿圈;49、压板;5、关
节转接件;6、连接杆;7、关节输出摇臂;81、电能发射线圈;82、电能接收线圈;91、第一电机
编码器定子;92、第一电机编码器转子;93、第二电机编码器定子;94、第二电机编码器转子;95、第一输出编码器定子;96、第一输出编码器转子;97、第二输出编码器定子;98、第二输出
编码器转子;10、导热件;101、导热槽。图片来源:CN 221938342 U
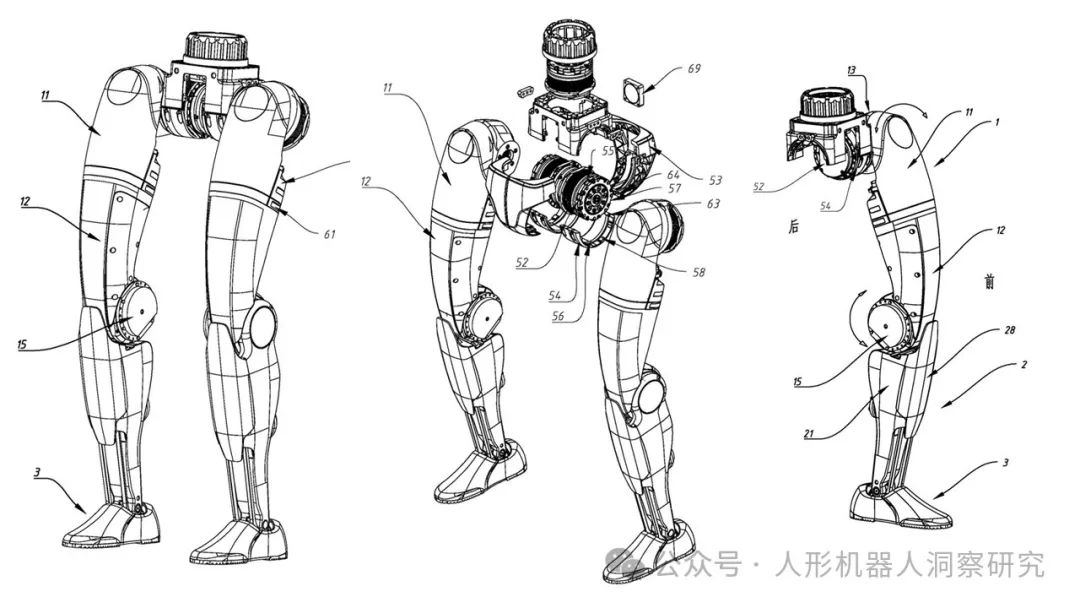
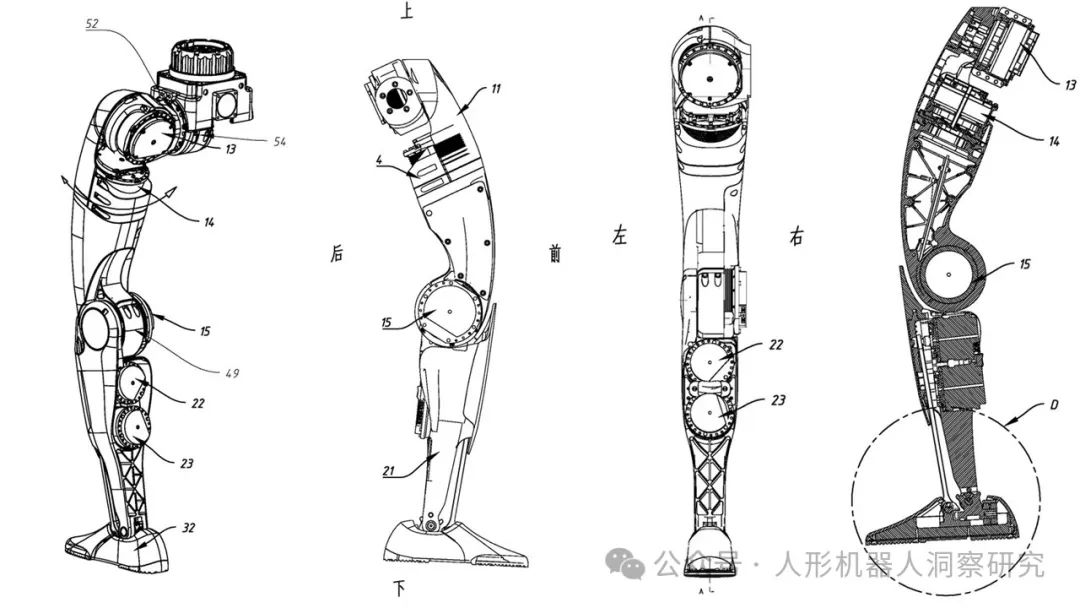
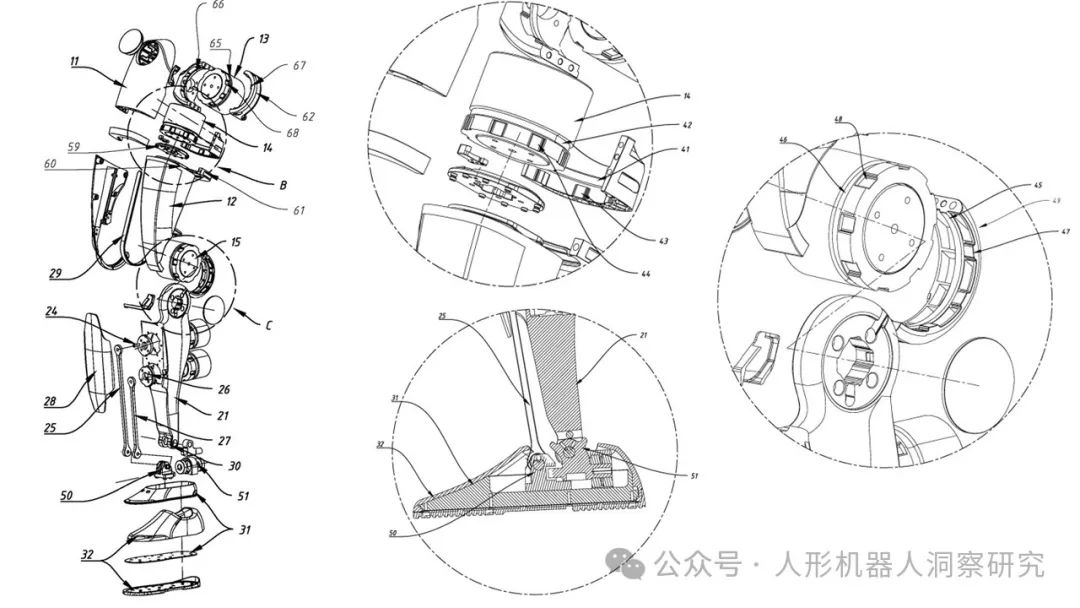
本实用新型提出了一种用于人形机器人的腿部动力结构,它通过巧妙地组合多个驱动单元(如跨步驱动单元、髋关节驱动单元等),并采用抱箍件来固定这些单元,不仅实现了腿部复杂的运动功能,而且保证了结构的紧凑性和易于维护的特点。此外,还加入了有效的散热措施以确保系统的稳定性。总之,这项发明显著提升了人形机器人腿部动作的表现力和可靠性,促进了此类技术的发展与应用。
丨技术背景
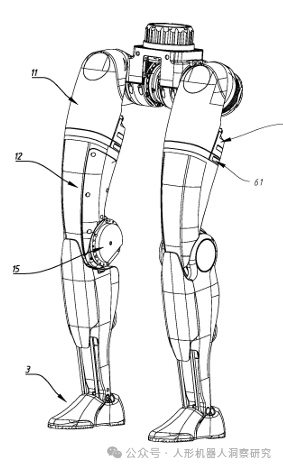
近年来机器人产业发展迅速,尤其人形机器人成为国内外机器人技术领域的焦点 之一,而人形机器人的腿部动力结构又为人形机器人设计的重点。进一步,中国专利(公布号CN111098951A)公开了一种类人形服务机器人的行走结 构及机器人。该行走结构中,髋部与躯干部之间配置有两组脚连接件与连杆,髋部、躯干部、 一组的脚连接件与连杆构成四杆机构,髋部相对固定不动,髋舵机能够驱动躯干部相对于 髋部摆动,使连杆与脚连接件联动。两个脚连接件分别固定至两个脚舵机的输出轴,每组四 杆机构与对应的脚舵机作为一个腿部。但上述方案利用四杆机构与一个髋舵机,实现髋部与腿部的运动形态,能够做出 的动作比较少,无法满足人形机器人要实现各种姿态、动作的要求,拟人效果不好,不利于 人形机器人的推广使用。进一步,上述方案中,人形机器人的腿部动力结构设计以及布局不够合理,整体结 构比较臃肿,不够紧凑。。该实用新型专利旨在解决现有技术中人形机器人腿部动力结构设计不合理、布局臃肿且不够紧凑的问题。具体来说,背景技术中提到的方案利用四杆机构与一个髋舵机实现髋部与腿部的运动形态,但这种设计能够做出的动作有限,无法满足人形机器人实现各种姿态和动作的需求,拟人效果差,不利于机器人的推广使用。模块化驱动单元:通过设置跨步驱动单元、髋关节驱动单元、第一驱动单元、膝关节驱动单元和脚踝驱动单元,实现了腿部各个方向的自由度,可以进行前后摆动、左右摆动、周向转动以及上下左右方向的摆动。抱箍件固定结构:为驱动单元提供了一种快速拆卸的抱箍结构,通过凸台和凹槽限制驱动单元在腿体上的轴向和周向位移,确保安装稳固同时便于维护。紧凑设计:整个腿部动力结构设计合理,各部件之间的连接紧密,不增加额外尺寸,保持了整体的紧凑性,有利于提高机器人的灵活性和适应性。散热设计:引入导热件和散热件以加快大腿体和小腿体内电机等发热部件的散热,保证系统稳定运行。拟人化动作:通过上述设计,机器人能够模仿人类行走时的各种复杂动作,提高了拟人效果,增强了用户体验。结构简单紧凑:所有驱动单元和辅助结构的设计都考虑到了紧凑性和轻量化,使得腿部动力结构更加高效。易于维护:抱箍件的使用简化了装配过程,并允许快速更换或维修内部组件。增强的散热性能:特别针对电机工作时产生的热量进行了优化处理,延长了设备使用寿命。丰富的动作表现:多自由度的设计让机器人可以执行更多样化的动作,增加了其应用场景的可能性。图中: 图中:1、大腿体组件;11、第一大腿体;12、第二大腿体;13、髋关节驱动单元;14、第
一驱动单元;15、膝关节驱动单元;2、小腿体组件;21、小腿体;22、第一脚踝驱动单元;23、第
二脚踝驱动单元;24、第一摇臂;25、第一连动杆;26、第二摇臂;27、第二连动杆;28、弹性保
护罩;29、导热件;30、后叉臂;3、脚部组件;31、脚部支撑件;32、脚部缓冲件;4、第一抱箍件;41、第一环形凸台;42、第一环形凹槽;43、第一凸台;44、第一凹槽;45、第二环形凸台;46、第
二环形凹槽;47、第二凸台;48、第二凹槽;49、第二抱箍件;50、前轴承座;51、后轴承座;52、
跨步驱动单元;53、腰腹部件、54、第六抱箍件;55、第六环形凹槽;56、第六环形凸台;57、第
六凹槽;58、第六凸台;59、输入连接件;60、输出连接件;61、第五抱箍件;62、第三抱箍件;63、连接孔;64、装配孔;65、第三环形凹槽;66、第三环形凸台;67、第三凸台;68、第三凹槽;69、散热件。免责声明:我们整理和转载此文出于传播更多资讯之目的,本文所用的视频、图片、文字如涉及作品版权问题,请第一时间联系小编我们将立即删除,无任何商业用途!