

本文研究了一种永磁同步电动机模糊控制器的构造方法。该控制器必须在动态变化的负载存在时提供指定类型的瞬态响应。为了研究目的,开发了一个由可控永磁同步电机驱动和直流负载电机组成的实验台。
本文研究了永磁同步电动机的工作特性及控制方法。为了研究、调整和调试调节器,开发了一个试验台。
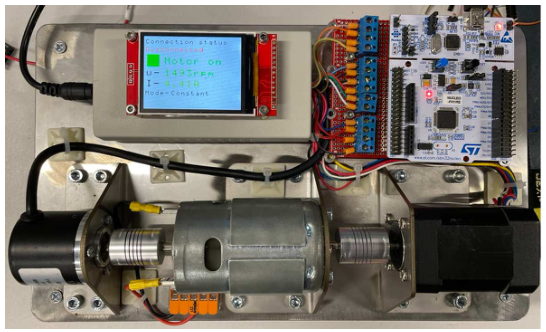
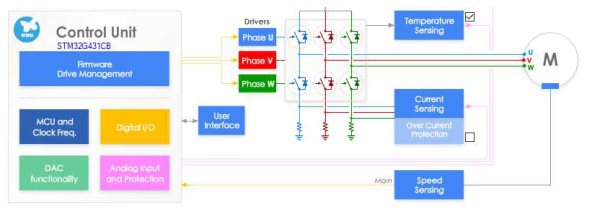
在本例中,选择了BG431B-ESC1控制逆变器。逆变器板由:MOSFET晶体管上的三相桥式电路,电流反馈传感器(3个分流电路),带有Cortex-M4核心的中央控制器STM32G431CB组成,其特点非常适合研究模糊逻辑(或其他难以计算的)控制系统。采用参数(见表1)在动态制动模式下工作的直流收集电机作为负载。被控电机为PMSM,参数见表2。
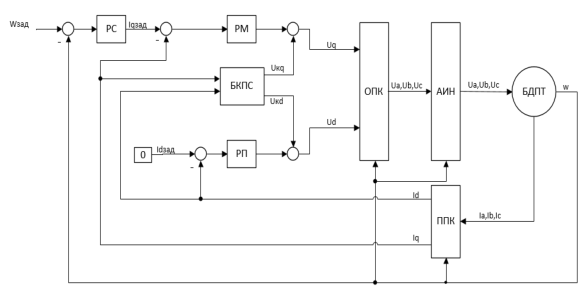
外接微机控制系统采用速度控制的场向控制算法,速度反馈由霍尔传感器实现如图:
将模糊逻辑控制器插入控制系统外部闭环(如下图)(速度环)中代替PID控制器,结果系统中的电流环仍在PID控制器的控制下。
永磁同步电机控制系统基于模糊逻辑控制器,其结构如下:
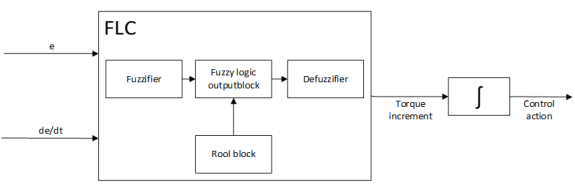
当明确使用模糊控制器时,存在限制控制动作值的问题。这种限制可以通过使用单调的隶属函数,识别控制动作的物理上可能的极限,或者通过在系统中添加积分器来克服。在研究过程中,决定使用单增益积分器单元,因为它不需要额外的系统识别,并且更容易在低功耗微控制器上的软件中实现。它被集成到一个现成的矢量控制系统中,而不是外部速度环,该系统基于可编程逆变器B-G431B-ESC1。根据误差数据和电机转子转速的一阶误差导数进行控制。调节变量为第二个控制闭环的力矩设置的增量。这些参数作为隶度变量如图:
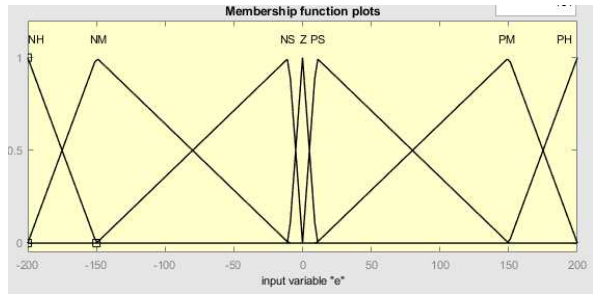
表1
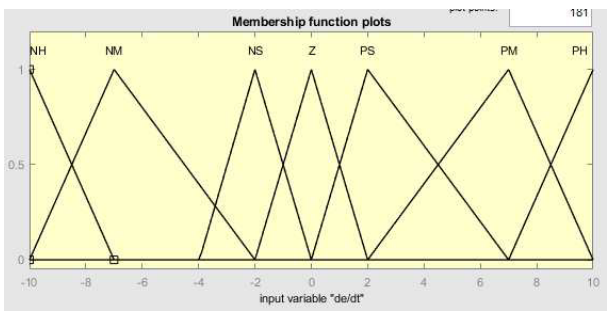
表2
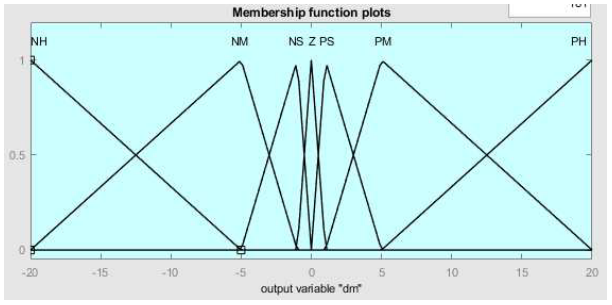
表3
模糊控制器是一个专业的系统,隶属度函数的边界是在对给定驱动器运行速度的速度、超调量、振荡和可达性进行定性评估的基础上通过实验确定的。
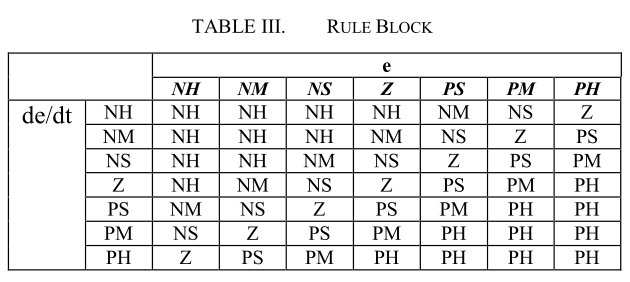
模糊逻辑控制基于表3所示的模糊规则
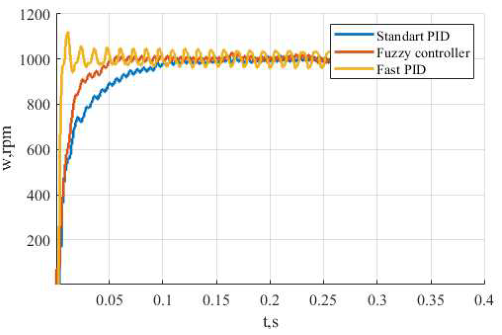
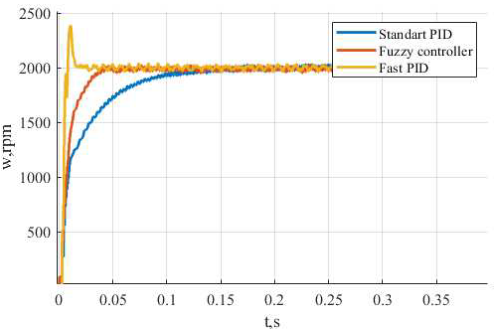
为了比较速度控制器的操作,考虑了PID控制器的两种设置——标准的,它提供了一个单调的瞬态过程,加速的——增加了比例和积分增益,它提供了更高的速度。选择转子转速1500rpm作为调节器的标称调节点,并以1000rpm和2000rpm为调节点,研究了调节器偏离标称模式时的行为。
下面是两种不同PID和模糊控制器在标称点和偏离标称值处的转子转速图。
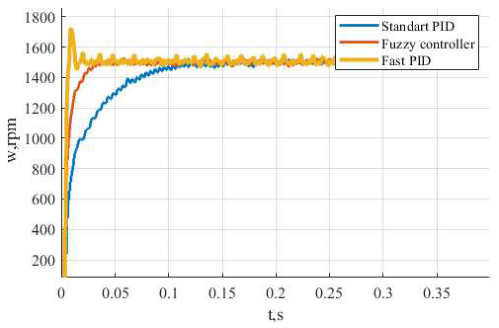
研究表明,模糊PD控制器和PID控制器各有优缺点。已经证明,与PID控制器相比,使用模糊控制器可以获得具有高性能的单调过程,而在使用PID控制器的系统中,当试图提高性能时,瞬态过程具有波动特征。另外,需要注意的是,由于PMSM发动机控制模块的计算能力较低,因此值得谨慎使用模糊控制器,或通过各种方式优化其运行,因为计算周期可能不满足控制系统指定的采样周期。根据上述优点,模糊PD控制器操作的进一步研究计划作为移动机器人车轮控制系统的一部分进行。
1.智新对于电动汽车主驱功率半导体模块的开发思考
2.如何提升碳纤维转子在电驱动中的应用价值
3.新能源重卡电驱桥产品力研究及架构创新
4.舍弗勒全新电驱动桥集成方案一览
5.面向扁线工艺的电机设计过程
扫描二维码|关注我们 ● 电动车千人会 ● | 扫码关注智能汽车 ● EVH1000智能汽车 ● |
欢迎加入新能源汽车产业交流群
关注公众号后台回复关键词“社群”
即可获取入群方式
【免责声明】文章为作者独立观点,不代表电动车千人会立场。如因作品内容、版权等存在问题,请于本文刊发30日内联系电动车千人会进行删除或洽谈版权使用事宜


