编者语:后台回复“入群”,加入「智驾最前沿」微信交流群
自动驾驶地图作为L3级及以上自动驾驶技术的核心基础设施,其重要性随着智能驾驶技术的发展愈发显著。《自动驾驶地图数据规范》(DB11/T 2041-2022)由北京市规划和自然资源委员会制定,旨在从技术、管理和应用等多个维度规范自动驾驶地图数据的生产与使用。


引言
随着全球范围内自动驾驶技术的加速发展,自动驾驶地图这一新型数字基础设施正逐渐成为智能汽车产业的核心支撑。不同于传统导航地图,自动驾驶地图需要在厘米级的空间精度基础上,提供车道级导航信息、超视距环境感知能力和丰富的交通规则语义数据。这不仅对地图数据的采集和表达提出了极高的要求,也对其动态更新和安全性保障形成了挑战。
在此背景下,北京市发布了《自动驾驶地图数据规范》,为自动驾驶地图的生产、管理与应用提供了技术标准和实施指南。通过统一规范,地图企业能够有效规避因技术路线分歧导致的重复研发成本,同时提升数据兼容性和应用效率。对于地方政府而言,标准的实施将为智能交通管理、智慧城市建设提供重要的数据支持,并加速北京市在智能网联领域的产业化进程。

标准编制背景
2.1 战略背景与城市需求
自动驾驶技术作为新一代信息技术与工业制造融合发展的典型代表,已被国家明确列为推动高质量发展的战略重点之一。在《北京城市总体规划(2016-2035)》中,北京市提出了建设全球科技创新中心的目标,而自动驾驶产业是实现这一目标的重要抓手。通过推动自动驾驶地图的标准化,北京不仅能够优化产业链资源配置,还能形成可复制的技术路径,为全国范围内的智能交通建设提供范例。
从技术层面来看,5G通信网络的普及、人工智能算法的成熟以及车路协同系统的广泛应用,为自动驾驶地图的发展奠定了基础。自动驾驶地图作为全新的技术载体,其制作、管理和应用尚缺乏统一标准,导致企业间技术分散、资源浪费等问题日益显现。北京市出台地方性标准,从地方层面统一技术规范,既是应对这些挑战的必要措施,也是推动自动驾驶技术实现规模化应用的重要一步。
2.2 自动驾驶地图的核心价值
自动驾驶地图被誉为L3级及以上自动驾驶系统的“第二传感器”,具有传统导航地图无法比拟的核心价值。它能够实现车道级定位与导航,为自动驾驶车辆提供精准的路径规划支持。与普通导航地图提供“由A点到B点”的宏观导航信息不同,自动驾驶地图以厘米级精度描绘车道中心线、边界线等微观结构,确保车辆能够精确控制行驶轨迹。
自动驾驶地图还能够提前感知前方道路环境,包括坡度、曲率、交通标志和信号灯等信息,帮助车辆在复杂路况下做出更高效、更安全的决策。例如,在接近弯道或匝道入口时,地图可协助车辆提前减速或调整车道,以避免因路径规划不足导致的事故风险。
此外,自动驾驶地图通过与传感器数据的结合,能够实现环境特征的匹配定位,提升车辆在GPS信号弱化场景中的导航能力。同时,它还可以为主动安全功能提供决策依据,例如避障和紧急制动。这些特性使自动驾驶地图成为智能汽车的重要技术支撑,也凸显了制定规范化标准的必要性。
2.3 标准化的必要性
在自动驾驶地图的研发和推广过程中,标准化不足的问题已成为制约行业发展的主要障碍之一。由于缺乏统一的数据采集和表达规范,各地图厂商的技术路线存在显著差异,导致地图数据难以互通,行业协作成本居高不下。企业为应对不同应用场景的需求,不得不投入大量资源开发特定格式的数据,这既延缓了产品上市周期,也对中小企业形成了技术门槛。
与此同时,自动驾驶地图的数据安全与隐私保护问题日益受到关注。地图数据涉及到国家测绘和地理信息安全,未经规范化处理的地图产品可能引发信息泄露甚至法律风险。因此,通过法律法规和技术标准的结合,统一规范地图数据的采集、管理和使用,不仅能够保障数据安全,还能推动产业的规范化发展。

标准主要内容
3.1 标准适用范围
《自动驾驶地图数据规范》适用于地图厂商生产自动驾驶地图、政府管理机构审查地图,以及支持高级驾驶辅助系统(ADAS)与L3及以上级别自动驾驶汽车的运行。其主要应用场景涵盖机器人导航、精细化交通管理以及车路协同等领域。通过明确标准的适用范围,规范能够在产业链的不同环节形成统一的技术基准,为相关技术的推广与应用奠定了基础。
3.2 数据基本规定
标准从时空基准、精度要求、数据格式及安全性等多个维度对地图数据提出了基础性要求。
在时空基准方面,标准要求所有数据的空间基准采用2000国家大地坐标系,高程基准采用大地高,时间基准可选择协调世界时(UTC)或北京标准时(BST)。这种规范化的时空基准确保了地图数据在全国范围内的适配性和兼容性。
标准还明确规定了自动驾驶地图的精度要求:绝对位置精度需优于1米,相对位置精度需优于0.5米。这一要求显著高于传统导航地图,旨在满足自动驾驶系统对精细化数据的需求。
标准建议采用通用地理信息系统(GIS)三维矢量格式存储数据,以支持地图数据的扩展性与互操作性。在安全性方面,标准强调地图数据必须通过国家指定机构的审查,确保数据内容符合测绘法等法律法规要求,并获得合法的审图号。
3.3 数据内容与组织
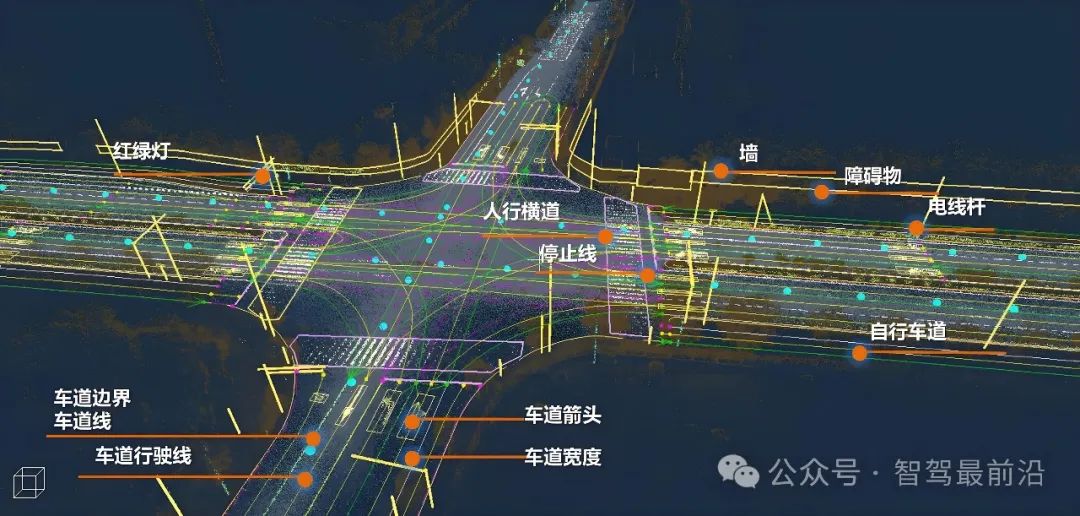
根据《自动驾驶地图数据规范》,地图数据按内容分为五个层级,包括道路交通标志、道路交通标线、道路交通设施、道路级交通网络和车道级交通网络。这种分层组织方式不仅能够实现数据的高效管理,还便于不同类型信息的表达与更新。
例如,在道路交通标志数据层,标准详细定义了标志的几何表达方式、属性结构及其与道路网络的关联关系。几何表达方式要求以多边形面形式精确描述标志牌的边界,属性结构则包括标志类型、颜色、朝向等信息。这些细节确保了地图数据的精准性和可操作性,为车辆的环境感知提供了可靠支持。
类似地,车道级交通网络层的数据组织以车道中心线为核心,结合车道属性、几何形态及关联关系,构建完整的车道拓扑结构。通过对这些数据的精细化处理,自动驾驶车辆能够实现复杂场景下的高精度导航与控制。
3.4 数据质量控制与技术细节
数据质量直接影响自动驾驶地图的可靠性和使用效果。标准从完整性、一致性、精度及动态更新等方面对数据质量提出了明确要求。
在完整性方面,标准规定地图数据需覆盖目标区域内的所有道路网络和相关设施。这不仅包括主干道、高速路,还需涵盖复杂路口、匝道及其他关键区域的信息。例如,对于城市快速路,除了道路中心线的几何描述,还需包含道路两侧的标志标线、信号灯等信息,以确保地图数据的细致完整。
一致性是数据质量控制的另一核心要求。标准要求地图数据的几何表达、属性描述及逻辑拓扑结构之间需保持高度一致。例如,车道中心线与车道边界线的几何关系需在空间上保持统一,同时其关联属性如车道类型、限制通行时间等需符合逻辑。这种一致性保障能够提升数据的计算效率,并减少车辆在决策过程中的误判概率。
精度验证是质量控制的重要环节。标准通过一系列技术指标,如绝对位置精度和相对位置精度,确保地图数据符合自动驾驶技术的需求。实际操作中,数据采集需采用高精度定位设备,如GNSS差分定位系统和激光雷达,结合实时校准算法和多次测量对比,以达到厘米级别的空间精度。
动态更新能力也是自动驾驶地图的核心竞争力之一。标准要求地图数据能够反映道路和交通环境的实时变化,例如新增的限速标志、封闭路段或突发交通事故等信息。这些动态信息通过与智能路侧设备及车载传感器的协同采集,可实现对地图数据的快速更新,从而提高自动驾驶系统的适应能力。

实践案例与应用分析
4.1 百度智图:全域高精度地图建设
百度智图基于《自动驾驶地图数据规范》完成了北京市全域近4万公里的高精度地图制作。这一项目覆盖了北京市的主要高速公路、城市快速路及复杂路口,为百度Apollo自动驾驶系统提供了核心数据支持。

在技术实现上,百度智图通过高精度激光雷达和摄像头进行道路环境采集,并结合多源数据融合算法生成地图数据。值得一提的是,为了满足标准中的时空基准要求,百度智图在采集过程中采用了GNSS差分定位与IMU惯性导航结合的方式,确保了地图数据在空间和时间上的高度精准。
百度智图的高精度地图已成功应用于Apollo无人驾驶出租车“萝卜快跑”项目,覆盖了亦庄、首钢冬奥园等多个自动驾驶示范区。这不仅证明了地图数据的实际应用价值,也展示了统一标准在产业化落地中的重要作用。
4.2 易图通科技:定制化地图服务
易图通科技针对北京市五环外高快速路网开展了自动驾驶地图制作工作,其数据组织和内容设计完全符合《自动驾驶地图数据规范》的要求。通过灵活的标准规格与客制化规格结合,易图通能够根据不同企业的应用需求提供定制化地图服务。
例如,在某自动驾驶公交项目中,易图通为车辆的固定路线提供了精细化地图数据。这些数据不仅包括道路级网络和车道级网络,还涵盖停车站点的具体位置及周边环境信息。这种定制化服务能够显著提升公交车辆在固定场景下的运行效率,同时为多场景地图应用积累了技术经验。
4.3 四维图新:细致化采集与全场景覆盖
四维图新在北京市海淀区完成了1654公里的高精度地图采集工作,其数据覆盖范围包括城市复杂路口、高速公路匝道以及普通道路。这些数据为自动驾驶车辆在多样化场景下的运行提供了精确支持。

在采集过程中,四维图新特别注重细致化表达。例如,对于高架桥和立交桥等多层道路结构,地图数据需分别定义每一层的几何位置及关联关系,以确保车辆在不同层级的道路上均能正确导航。此外,针对城市内的复杂路口,四维图新通过细化车道中心线和信号灯几何位置关系,为自动驾驶车辆提供了更高精度的环境感知支持。
4.4 标准应用成效总结
上述案例表明,《自动驾驶地图数据规范》的实施在以下几个方面发挥了重要作用:
1. 数据兼容性与技术协同:通过统一规范,不同厂商的地图数据能够实现互联互通,为行业技术协作创造了条件。
2. 研发成本优化:减少了企业因技术分歧导致的重复研发投入,使其能够将更多资源用于创新技术的开发。
3. 产业化推动:高精度地图的规模化应用为自动驾驶系统的商业化落地提供了基础,同时加速了智能网联生态的构建。

行业影响与未来展望
5.1 技术规范化推动产业协同发展
《自动驾驶地图数据规范》的发布有效填补了行业标准空白,为企业研发和技术推广提供了明确指引。通过规范化的数据采集和管理流程,不同企业间的协同效率显著提升。例如,在车路协同领域,统一的地图数据能够加速智能路侧设备与自动驾驶车辆的技术对接,为智慧交通系统的构建奠定了基础。
5.2 数据动态更新与未来挑战
尽管标准明确了地图数据的质量要求,但在实际应用中,动态数据更新仍面临一定挑战。如何在保障数据安全的前提下,实现道路环境变化的实时反映,将是未来研究的重点方向之一。
智驾最前沿以为,可通过部署智能路侧设备,实时采集交通流量、信号灯状态等动态信息,并通过V2X通信将其同步至地图数据中。还可以结合人工智能技术,通过大规模自动化数据标注与更新算法,提升地图更新的速度与精度。
5.3 跨区域标准统一的重要性
目前,自动驾驶地图的标准化工作主要以地方性为主,跨区域标准的协调性不足,可能对全国范围内的自动驾驶推广造成限制。建议在国家层面制定更为统一的技术标准,确保不同区域间的地图数据能够无缝衔接,为自动驾驶车辆的跨区域运行提供保障。

结论
《自动驾驶地图数据规范》不仅是北京市推动智能交通产业发展的重要技术成果,也为全国范围内的自动驾驶标准化工作提供了宝贵经验。通过明确地图数据的采集、表达和管理要求,该标准提升了自动驾驶地图的实用性与可靠性,为车辆的精准导航和路径规划提供了技术保障。
未来,随着自动驾驶技术的进一步发展,高精度地图将在更多场景中发挥关键作用。通过持续完善标准体系、推动动态更新技术的应用以及加强跨区域合作,中国的自动驾驶地图产业将迎来更广阔的发展前景,同时为智慧城市建设注入新的动力。
编者语:「智驾最前沿」微信公众号后台回复:C-0582,获取本文参考报告:《自动驾驶地图数据规范详读》pdf下载方式。
-- END --

