当一个扫地机器人第一次来到你家时,它对家里的环境一无所知,所以第一次启动时,它的主要工作是探索这个未知环境,使用的技术就是SLAM。
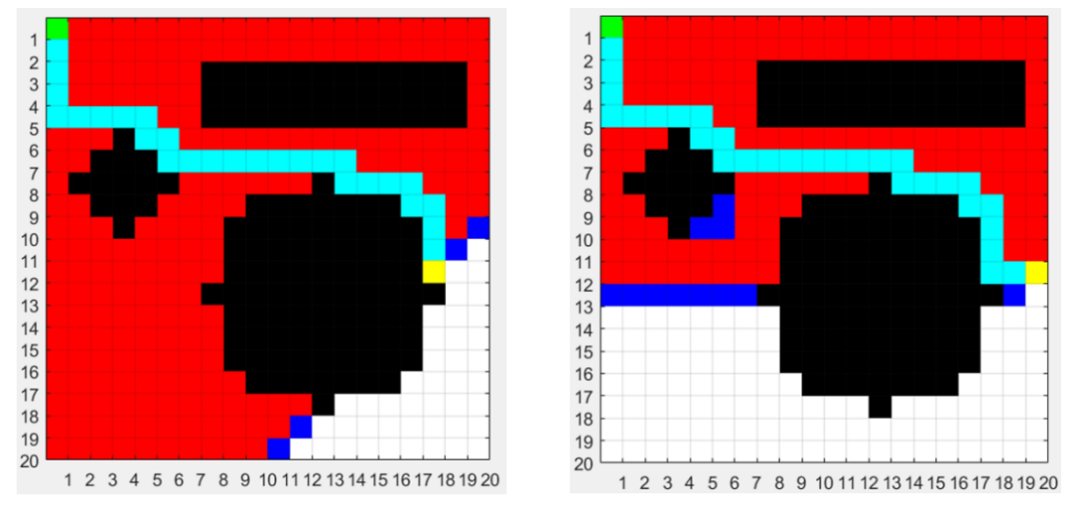
Dijkstra算法。Dijkstra可以看作一种广度优先算法,搜索过程会从起点开始一层一层辐射出去,直到发现目标点,由于搜索的空间大,往往可以找到全局最优解作为全局路径,不过消耗的时间和内存资源相对较多,适合小范围的路径规划,例如室内或者园区内的导航。
A*算法。由于加入了一个启发函数,在搜索过程中会有一个搜索的方向,缩小了搜索的空间。但是启发函数存在一定的随机性,最终得到的全局路径不一定是全局最优解。不过这种算法效率高,占用资源少,适合范围较大的应用场景。
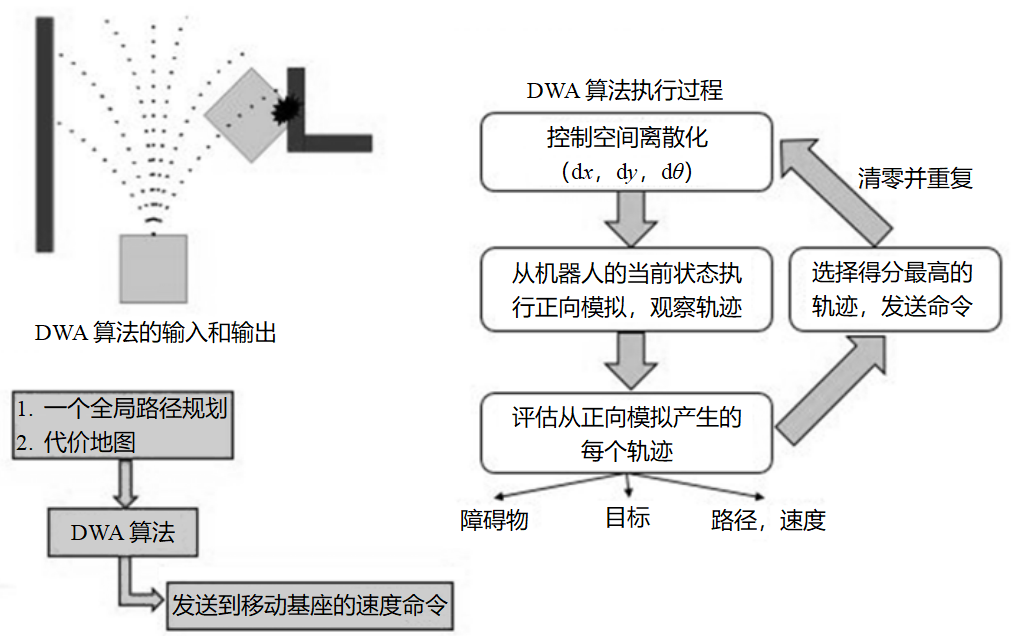
DWA算法。DWA(Dynamic Window Approaches)算法的输入是全局路径和本地代价地图的参考信息,输出是整个导航框架的最终目的——传输给机器人底盘的速度指令。这中间的处理过程是什么样的呢?如图4右侧所示。
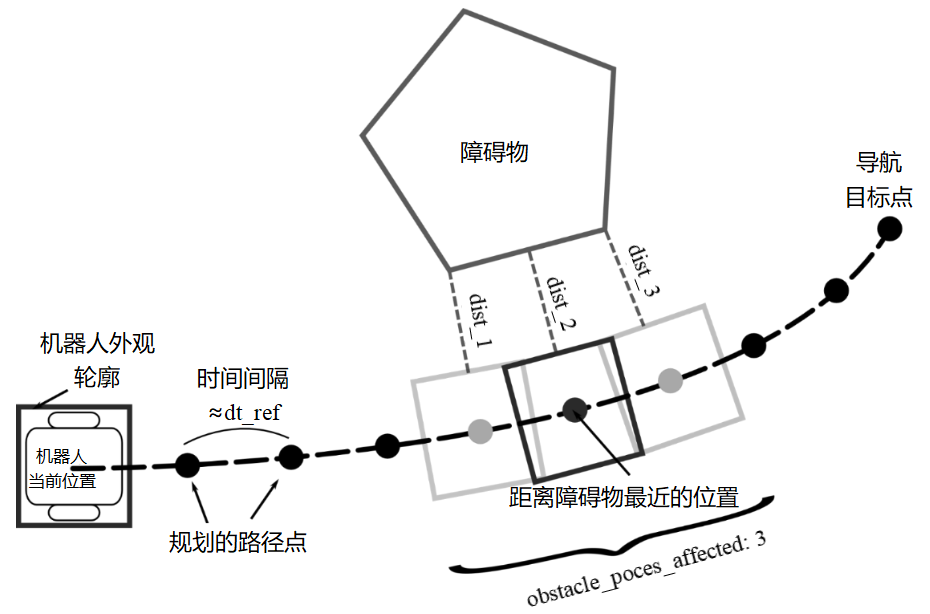
TEB算法。TEB算法的全称是Time Elastic Band,其中Elastic Band的中文意思是橡皮筋,可见这种算法也具备橡皮筋的特性:连接起点和目标点,路径可以变形,变形的条件就是各种路径约束,类似于给橡皮筋施加了一个外力。