
2025年1月14日,第四届全球自动驾驶峰会将在北京中关村国家自主创新示范区展示交易中心-会议中心举行。经过三年的发展,全球自动驾驶峰会已经成长为国内自动驾驶领域最具影响力、规模最大的产业峰会之一。
本次峰会由智一科技旗下智猩猩、车东西共同发起,以“技术新周期 产业新征程”为主题,计划邀请30+位嘉宾同台分享和讨论,全方位呈现自动驾驶端到端新周期里的科研成果、技术探索、产品方案创新与未来趋势。
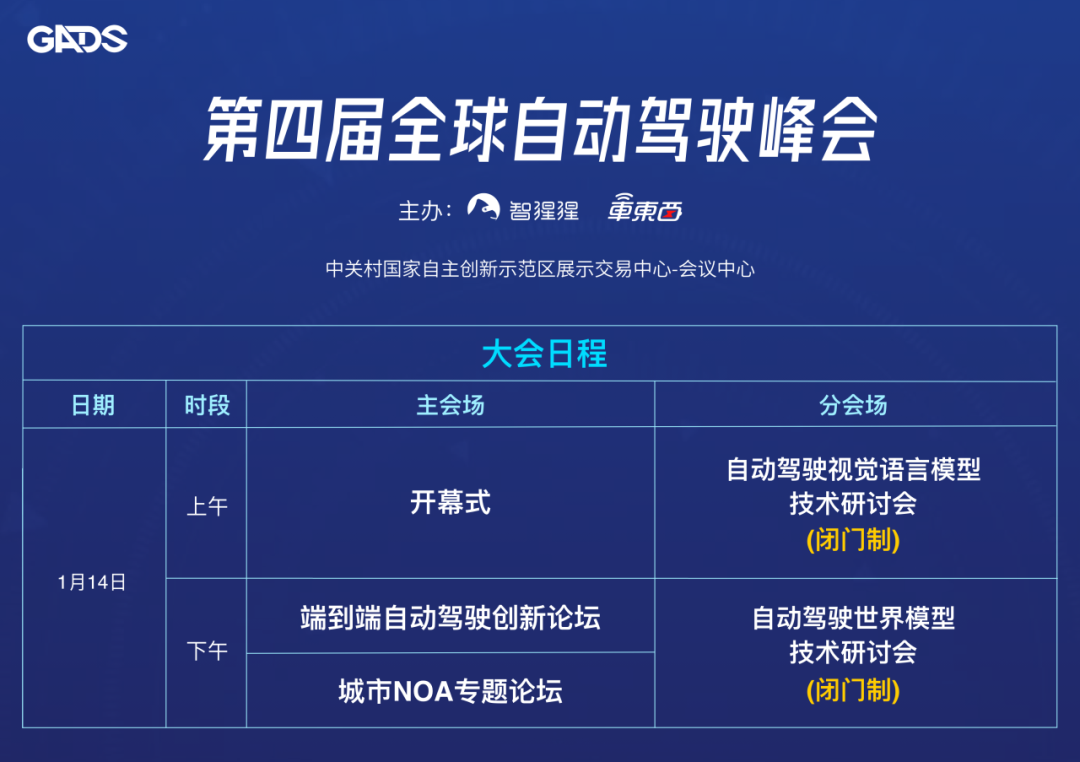
峰会由主会场+分会场+展区组成,主会场将进行开幕式、端到端自动驾驶创新论坛和城市NOA专题论坛,分会场将进行自动驾驶视觉语言模型技术研讨会、自动驾驶世界模型技术研讨会。其中,分会场的两场技术研讨会为闭门会议,主要向持有峰会通票或贵宾票的用户开放。
已经迫不及待报名的朋友,可以先扫描下方二维码添加小助手报名啦!

01、大会日程
峰会主会场将进行开幕式、端到端自动驾驶创新论坛和城市NOA专题论坛,分会场将进行自动驾驶视觉语言模型技术研讨会、自动驾驶世界模型技术研讨会。完整议程下周公布,可通过文末左下角「阅读原文」直达官网了解。
02、峰会部分嘉宾
目前,来自近30家企业、高校与科研机构的嘉宾学者已确认参与主题演讲和圆桌Panel。接下来为大家介绍部分嘉宾。更多嘉宾可以关注官网进行了解。
在主会场上午进行的开幕式上,清华大学车辆与运载学院党委书记、人工智能学院教授、博导李升波将作开场报告,理想汽车自动驾驶研发副总裁郎咸朋,智加科技首席科学家崔迪潇,元戎启行副总裁、技术合伙人刘轩,极佳科技合伙人&副总裁毛继明,辰韬资本执行总经理刘煜冬将进行主题演讲。
在主会场下午进行的端到端自动驾驶创新论坛上,中科院自动化所副研究员张启超,零一汽车智能驾驶合伙人王泮渠,朗歌科技副总经理、智驾地图事业部总经理李战斌将带来主题分享。
北汽研究总院智能网联中心专业总师林大洋,全道科技CTO刘斌,上海昱感微电子科技有限公司创始人&CEO蒋宏将在主会场下午进行的城市NOA专题论坛上发表演讲。
在分会场上午进行的自动驾驶视觉语言模型技术研讨会上,华中科技大学Hust Vision Lab与地平线联合培养博士生蒋博将分享地平线在端到端 / VLM / VLA的探索与思考;中国科学院自动化研究所多模态人工智能系统全国重点实验室助理研究员戴星原,香港中文大学MMLab在读博士邵昊也将带来主题报告。
在分会场下午进行的自动驾驶世界模型技术研讨会上带来分享的嘉宾已全部确定。西湖大学工学院博导、助理教授、人工智能企业KMind联创兼首席科学家于开丞将做开场报告。DriveWorld一作、中国科学院计算技术研究所助理研究员闵称博士将从降低不确定性的角度出发,分享如何构建能够同时建模认知和随机不确定性的世界模型。Vista一作、香港科技大学在读博士、上海AI Lab OpenDriveLab实习研究员高深远将着重介绍GenAD和Vista系列工作,主题为《构建开放场景中通用自动驾驶世界模型》。SimGen一作、上海交通大学计算机系2020级博士、上海人工智能实验室浦驾团队研究员周云松,将解读SimGen通过混合来自模拟器和真实世界的数据来学习生成多样化的驾驶场景。商汤绝影智能驾驶高级总监武伟也将带来主题报告,介绍商汤绝影“开悟”世界模型及其特性。
03、报名方式
峰会设置了三类电子门票,分别是免费票、通票和贵宾票。免费票申请需经组委会审核,通票、贵宾票均需购买。
持免费票可参加主会场(开幕式、端到端自动驾驶创新论坛和城市NOA专题论坛),持有通票或贵宾票,除了可参加主会场,还可参加两场闭门技术研讨会(自动驾驶视觉语言模型技术研讨会、自动驾驶世界模型技术研讨会)。详细权益,可通过文末左下角「阅读原文」,直达官网了解后,进行免费票申请或购票参会。
大家可以扫描下方二维码添加小助手“行远”申请免费票或购买门票。已添加过“行远”的老朋友,可以给“行远”私信,发送“自动驾驶”即可报名。

