


都说MCU本身不算什么高级东西,在MCU开发过程中,需要按照一定的标准化来执行,比如对变量,函数的定义,要确定他的生命周期,调用范围,访问条件等;常用的通信协议读写的协议往往应该抽象化,规定固定的输入输出,方便产品移植。
但实际上,很多时候,针对同一个需求其实有多种实现方案,但总有一个最优解。所以在这个过程中,总会有一些“脑洞大开”的操作,为人提供很多思路,今天就举几个例子给大家作为参考。
那些很惊艳的用法
当需要通过串口接收一串不定长数据时,可以使用串口空闲中断;这样就可以避免每接收到一个字符就需要进入中断进行处理,可以减少程序进入中断次数从而提高效率。
当需要测量一个波形的频率时,很多人会选择外部中断,其实通过定时器的外部时钟输入计数波形边沿,然后定时读取计数值计算频率的方式可以大大减少中断触发频率,提高程序执行效率。
在处理复杂的多任务场景时,可以利用实时操作系统(RTOS)来管理任务调度,提高系统的响应性和资源利用率。
对于需要低功耗运行的场景,可以采用动态电压频率调整(DVFS)技术,根据系统负载实时调整 MCU 的工作电压和频率,以降低功耗。
在进行数据存储时,采用闪存的磨损均衡算法,延长闪存的使用寿命。
利用硬件加密模块(如 AES 加密引擎)来保障数据的安全性和保密性,而不是通过软件实现加密,提高加密效率和安全性。
对于传感器数据的处理,采用数字滤波算法(如卡尔曼滤波),提高数据的准确性和稳定性。
当需要与多个设备进行通信时,采用总线仲裁机制和优先级设置,确保通信的高效和稳定。
在进行电源管理时,通过监测电源电压和电流,实现智能的电源管理策略,例如在低电量时进入低功耗模式。
对于实时性要求极高的控制任务,采用硬件直接触发中断,而不是通过软件轮询,减少响应延迟。
在单片机上跑的任何非线性系统的动态控制,都是高级用法。
用单片机去实现某种特殊的运动控制,赚很多钱,就是高级用法。
GPIO模拟一切
名为ShiinaKaze的网友,就非常“勇”,做了一个很折磨的事。
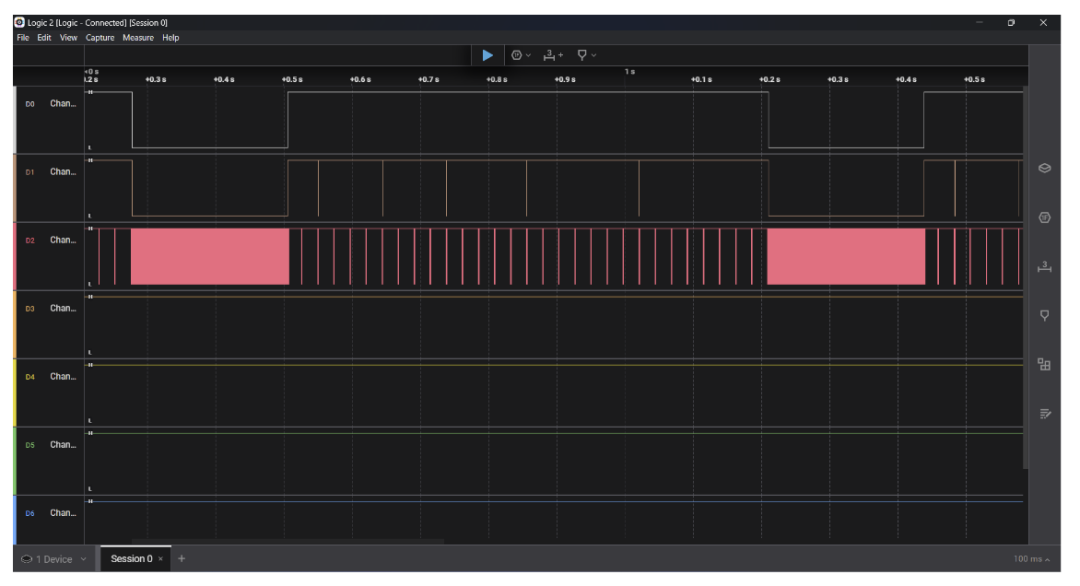
他用STM32F1利用GPIO模拟摄像头接口驱动OV2640摄像头模块。他表示,这是一个很折磨人的过程,我最多优化到了 1.5 FPSQ,所以选型一定要选好,不要折磨自己。设备采用STM32F103C8T6,OV2640,实现效果如下:

OV2640实际时序图:
这个项目难点在于:
1.SCCB 模拟:SCCB 是12C-bus 的改版,主要是 OV2640 模块没有上拉电阻,无法进行通信,花了好长时间才发现这个问题;
2.并行接口的模拟:如果使用 IO 模拟的话,只能达到1FPS,但是使用了 Timer 和 DMA,就可以达到 1.5~2 FPS。
关于 image sensor 的数据接收和处理的问题背景:现有 ov2640 image sensor,接口为 DCMI(并行接口)问题:现有 STM32H7 想获取 OV2640 的 mjpeg 流数据,并通过传输数据到 PC 软件
1.采用 USART 还是 USB?
2.接收数据选择哪种中断,Line interrupt 还是 Frame interrupt ?
3.DCMI 通过 DMA 将数据转到 RAM 中的 Buffer,那么 Buffer 该如何设计,是设置一块大的连续 buffer?还是需要做一个 ring buffer,避免数据覆盖和数据顺乱?
4.触发中断后,是否关闭 DCMI 和 DMA ?
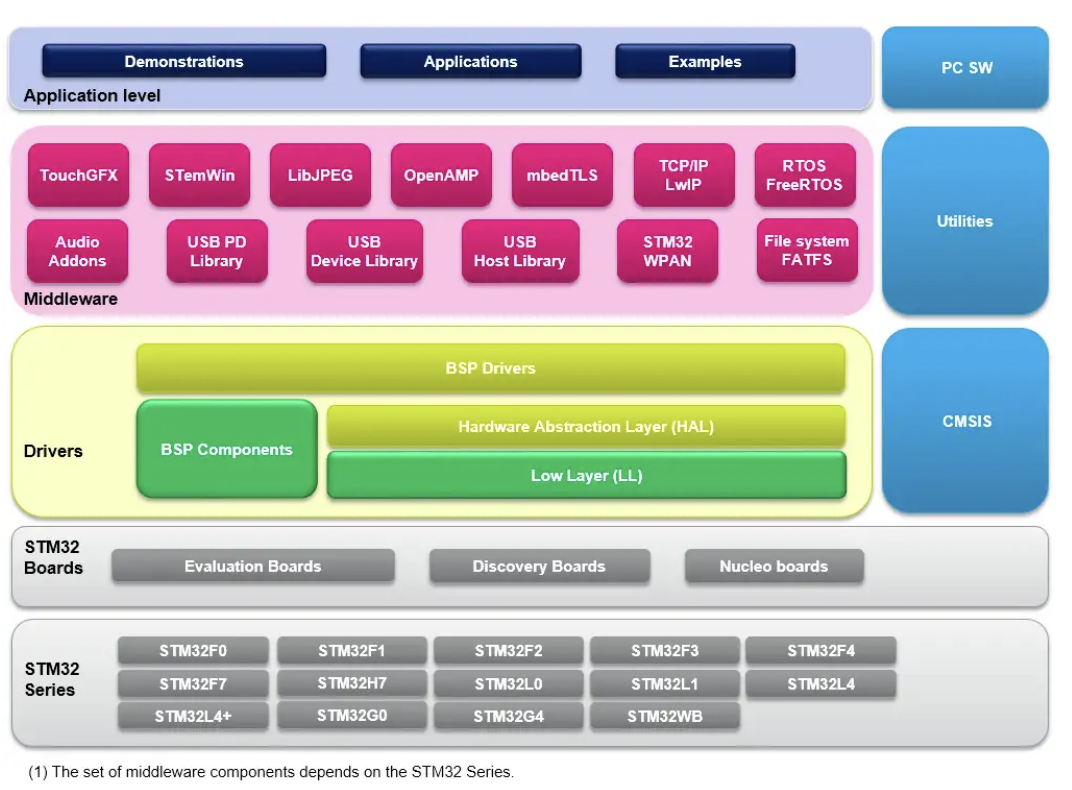
嵌入式软件架构挺重要的,特别是大型项目。这是 STM32 的软件架构,不知道各位还有没有其他架构。
有网友吐槽,你要是在学校,我敬你是条汉子,你要是在工作岗位上干这鸟事,那你们的架构也太坏了。而他也表示——“我错了,再也不模拟了。”
关于MCU不一样的观点
虽然如此,很多人还是认为,MCU不高级,使用单片机也不高级。高级的内容都是可以发论文的,使用单片机发不了论文。但使用单片机解决指定的任务,这很高级。
尤其是上面所说的一些例子,确实是MCU外设的一些高端玩法。只不过,这些机制可能只是一种标准用法。名为lion187的网友就表示,毕竟许多硬件机制有实际需求后才添加进来的,比如接收不定长数据,最初没有超时中断的情况下只能软件实现,极大的浪费了CPU的效率,所以才设计了超时中断来减少软件工作量,进而形成了一种标准使用方法。
当然,这也是芯片设计和制造工艺的提升带来的红利,早期芯片设计和工艺无法满足复杂外设电路时,谁也不敢会去想用硬件来实现这么复杂的功能,任何产品的开发,都离不开具体业务需求,MCU也不例外,
对产品来说,MCU外设的驱动只是完成开发的基本要素,更多的工作是围绕着业务逻辑展开的应用程序的开发。这时候数据结构与算法,各种控制算法和数值计算方法,设计模式,软件工程和设计理念成了高级的东西。
比如说,Linux 内核中的各驱动子系统的设计,设备对象和驱动对象这些沿用了 C++ 面向对象编程的思路,其实也可以沿用到 MCU的开发中,将设备与驱动分离,就可以使用同一套驱动算法来实现同类设备的不同驱动方法,
比如:同一个 UART 驱动可以根据配置的不同来驱动 UARTO,也可以驱动 UART1,而且波特率也可以不同(只要为 UART 类创建不同的实例对象就可以了,用 C 语言就行),这就是 C++ 中方法与属性分离带来的好处。
同样在业务应用部分,单件模式、工厂模式等设计模式,状态机模型的使用也会给开发带来很多便利,使系统结构清晰,有效减少Bug数量,且易于维护和扩展。
当然,也有人认为,论高级还得是FPGA。就比如AMD(赛灵思)的ZYNQ,当你需要通过串口接收一串不定长数据时,可以直接用Programmable Logic部分写一个专用的,最终结果放到DRAM里,发个信号通知ARM处理器来读就好了;当你需要测量一个波形的频率时,可以直接用Programmable Logic部分写一个专用的,实时不间断测量。这就很高级。

所以,对此你有什么看法,你有什么很“高级”的用法想要分享?
原文:https://www.zhihu.com/question/623077193
文章来源于网络,版权归原作者所有,如有侵权,请联系删除。

关注【一起学嵌入式】,回复“加群”进技术交流群。
觉得文章不错,点击“分享”、“赞”、“在看” 呗!
