击左上方蓝色“一口Linux”,选择“设为星标”
第一时间看干货文章 ☞【干货】嵌入式驱动工程师学习路线 ☞【干货】Linux嵌入式知识点-思维导图-免费获取 ☞【就业】一个可以写到简历的基于Linux物联网综合项目 ☞【就业】找工作简历模版
简介
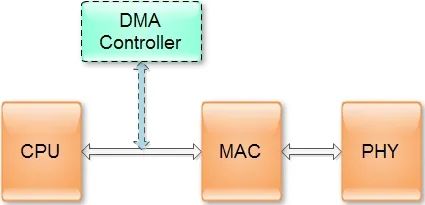 DMA控制器通常属于CPU的一部分,用虚线放在这里是为了表示DMA控制器可能会参与到网口数据传输中。
DMA控制器通常属于CPU的一部分,用虚线放在这里是为了表示DMA控制器可能会参与到网口数据传输中。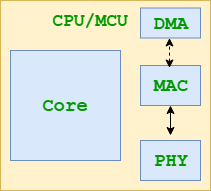
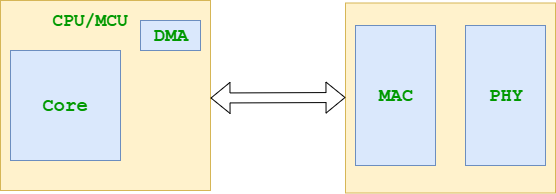
什么是MAC
什么是PHY
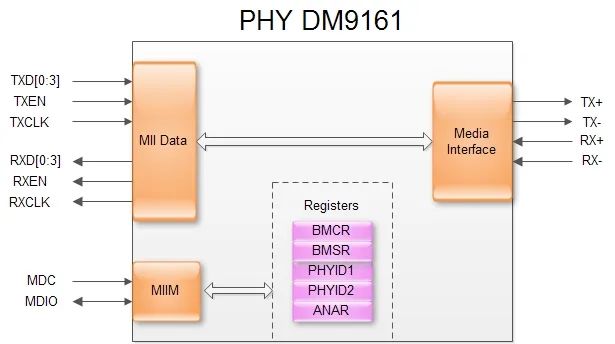
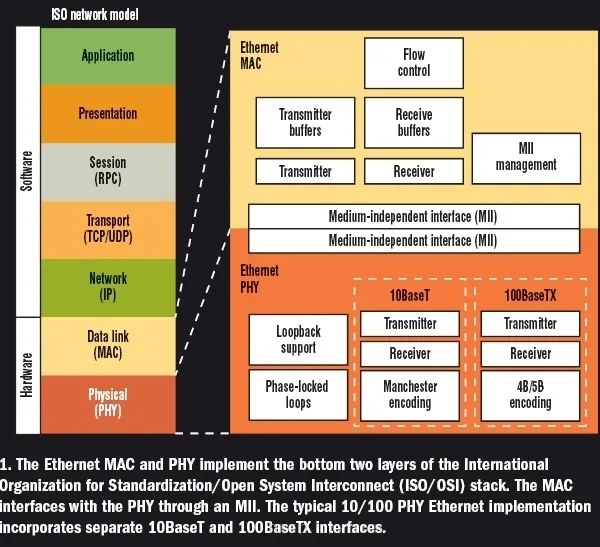
IEEE-802.3标准定义了以太网PHY。包括MII/GMII(介质独立接口)子层、PCS(物理编码子层)、PMA(物理介质附加)子层、PMD(物理介质相关)子层、MDI子层。它符合IEEE-802.3k中用于10BaseT(第14条)和100BaseTX(第24条和第25条)的规范。
注:PHY寄存器在IEEE802.3标准的 22.2.4 Management functions 节有介绍,但不涉及所有的寄存器,个别寄存器需要到其它章节中看,当然,文档里面也提到该在哪里找到哪个寄存器。
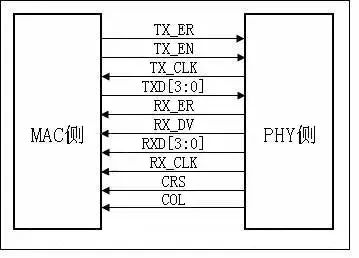
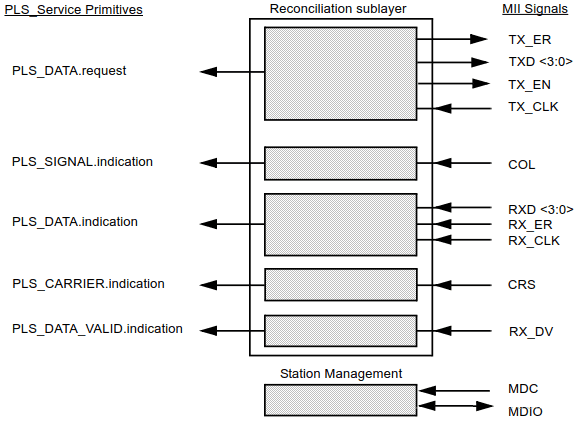
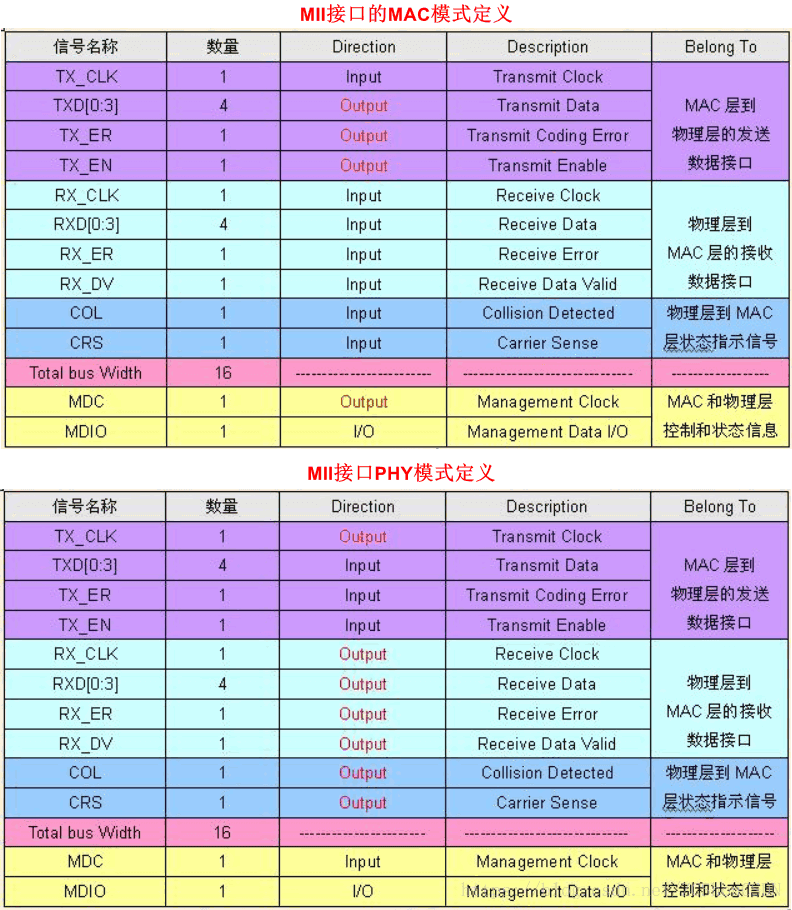
什么是MII
什么是RMII
什么是GMII
| 信号名称 | 描述 | 方向 |
|---|---|---|
| GTX_CLK | 1000M发送时钟 | MAC → PHY |
| TX_CLK | 100/10M发送时钟 | MAC → PHY |
| TX_ER | 发送数据错误 | MAC → PHY |
| TX_EN | 发送使能 | MAC → PHY |
| TX_[7:0] | 发送数据8bit | MAC → PHY |
| RX_CLK | 接收时钟 | PHY → MAC |
| RX_DV | 接收数据有效 | PHY → MAC |
| RX_ER | 接收数据错误 | PHY → MAC |
| RX_[7:0] | 接收数据8bit | PHY → MAC |
| CRS | 载波监测 | PHY → MAC |
| COL | 冲突碰撞监测 | PHY → MAC |
| MDIO | 管理数据 | 双向 |
| MDC | 管理数据时钟 | MAC → PHY |
什么是RGMII
| 信号名称 | 描述 | 方向 |
|---|---|---|
| TXC | 发送时钟 | MAC→PHY |
| TX_CTL | 发送数据控制 | MAC → PHY |
| TXD[3:0] | 发送数据4bit | MAC → PHY |
| RXC | 接收时钟 | PHY → MAC |
| RX_CTL | 接收数据控制 | PHY → MAC |
| RXD[3:0] | 接收数据4bit | PHY → MAC |
| MDIO | 管理数据 | 双向 |
| MDC | 管理数据时钟 | MAC → PHY |
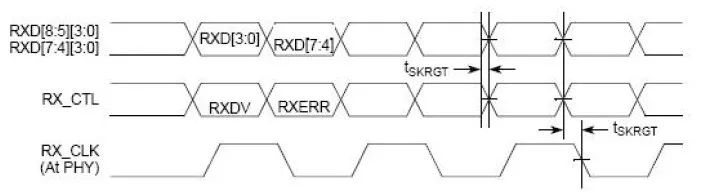
虽然RGMII信号线减半,但TXC/RXC时钟仍为125Mhz,为了达到1000Mbit的传输速率,TXD/RXD信号线在时钟上升沿发送接收GMII接口中的TXD[3:0]/RXD[3:0],在时钟下降沿发送接收TXD[7:4]/RXD[7:4],并且信号TX_CTL反应了TX_EN和TX_ER状态,即在TXC上升沿发送TX_EN,下降沿发送TX_ER,同样的道理试用于RX_CTL,下图为发送接收的时序:

什么是SMI
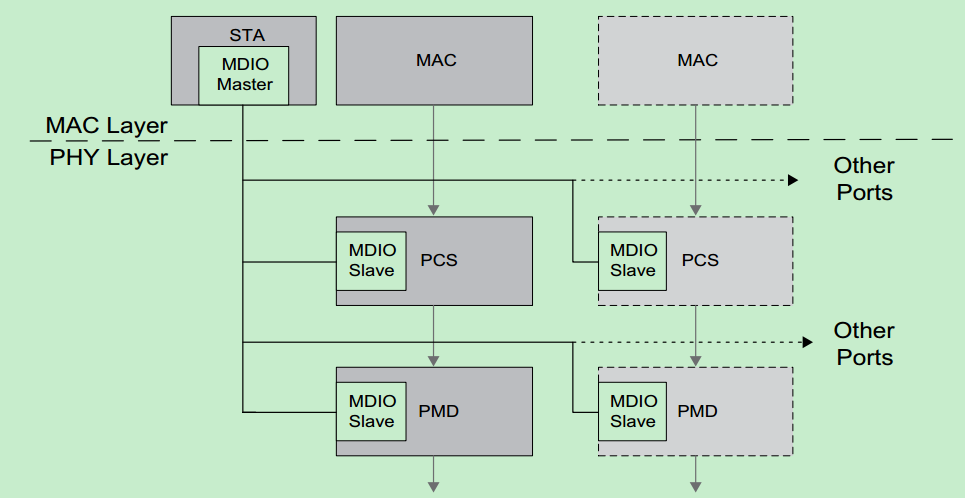
SMI:串行管理接口(Serial Management Interface),通常直接被称为MDIO接口(Management Data Input/Output Interface)。MDIO最早在IEEE 802.3的第22卷定义,后来在第45卷又定义了增强版本的MDIO,其主要被应用于以太网的MAC和PHY层之间,用于MAC层器件通过读写寄存器来实现对PHY层器件的操作与管理。
MDIO主机(即产生MDC时钟的设备)通常被称为STA(Station Management Entity),而MDIO从机通常被称为MMD(MDIO Management Device)。通常STA都是MAC层器件的一部分,而MMD则是PHY层器件的一部分。
MDIO接口包括两条线,MDIO和MDC,其中MDIO是双向数据线,而MDC是由STA驱动的时钟线。MDC时钟的最高速率一般为2.5MHz,MDC也可以是非固定频率,甚至可以是非周期的。MDIO接口只是会在MDC时钟的上升沿进行采样,而并不在意MDC时钟的频率(类似于I2C接口)。如下图所示。
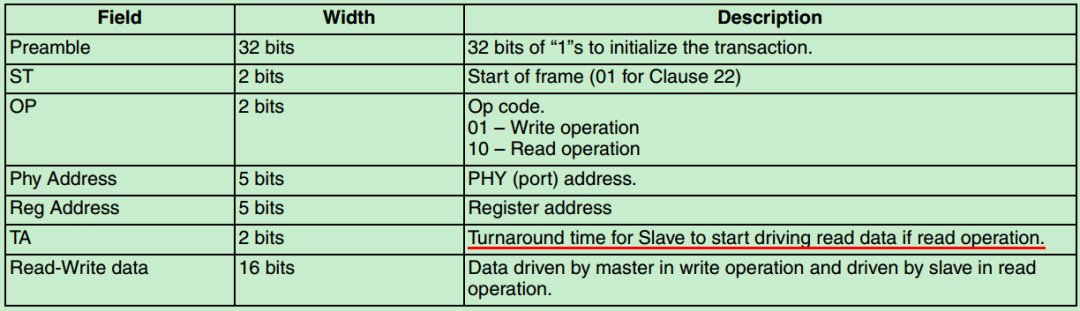
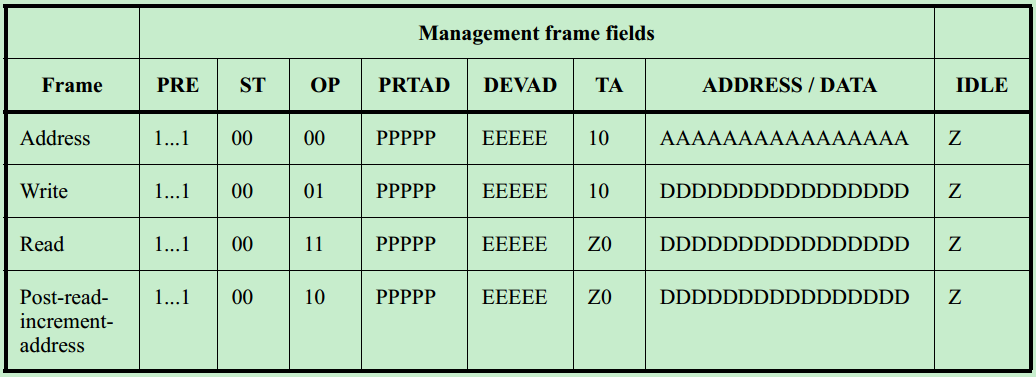
MDIO接口有两个版本,通常被称为卷22版本和卷45版本。卷22版本的MDIO接口最多支持连接32个MMD(PHY层设备),每个设备最多支持32个寄存器。卷45版本的MDIO接口最多支持连接32个MMD,32个设备类型,每个设备最多支持64K个寄存器。卷22版本的MDIO接口的数据帧格式如下:

具体每个bit描述如下:

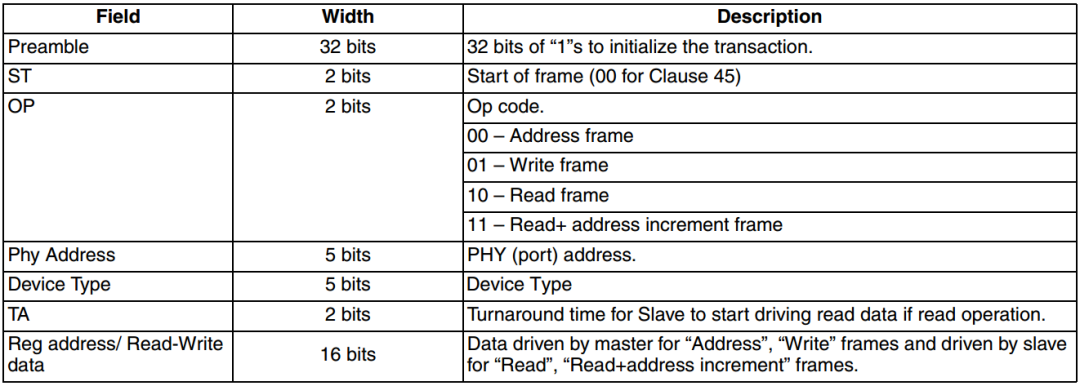
卷45版本的MDIO接口的数据帧格式如下:

具体每个bit的描述如下:
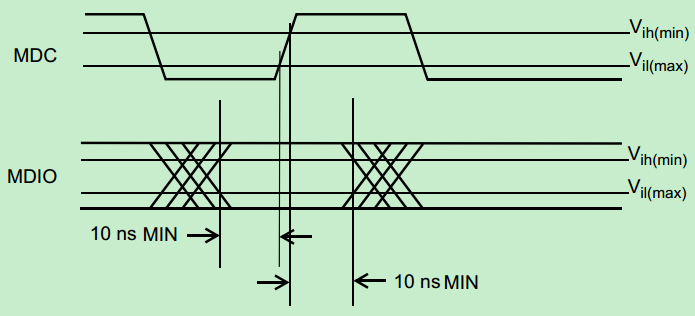
如果是STA(MAC层设备)驱动MDIO,则MDIO相对于MDC上升沿,至少要有10ns的建立时间(Setup Time)和10ns的保持时间(Hold Time)。如下图所示:
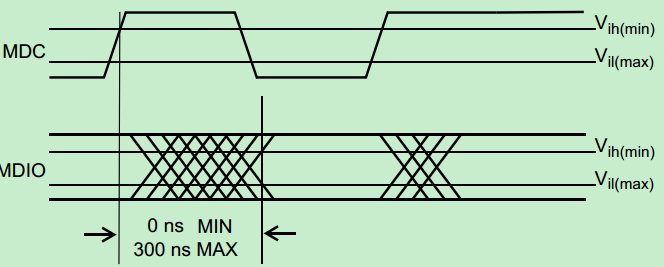
如果MDIO是由MMD(PHY层设备)驱动的,则MDIO相对于MDC的Tco(Clock to Output Delay)的范围是0ns~300ns。如下图所示:
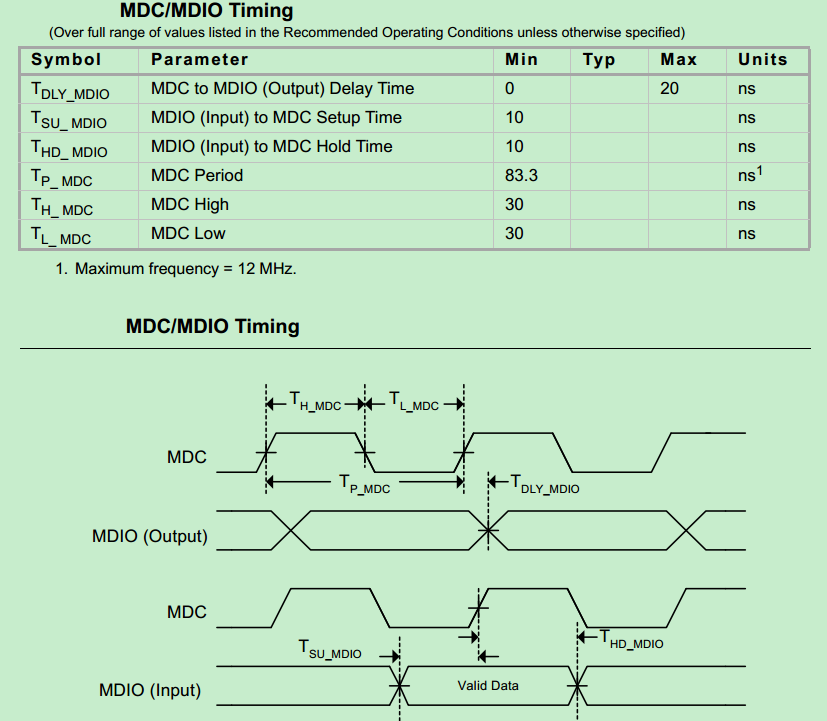
实际上,MDC的频率也并非一定是小于或等于2.5MHz,比如Marvell的88E1512最大支持12MHz的MDC:
IEEE 802.3建议同时对MDIO进行下拉(下拉电阻建议为2k欧姆+5%),和上拉(上拉电阻建议为1.5k欧姆+5%),使得在TA时,MDIO处于中间态。但是并非所有的PHY器件都有这样的要求,比如Marvell的88E1512只要求对MDIO进行上拉即可,上拉电阻范围为1.5k~10kΩ。
QA
网卡工作在osi的最后两层,物理层和数据链路层,物理层定义了数据传送与接收所需要的电与光信号、线路状态、时钟基准、数据编码和电路等,并向数据链路层设备提供标准接口.物理层的芯片称之为PHY.
数据链路层则提供寻址机构、数据帧的构建、数据差错检查、传送控制、向网络层提供标准的数据接口等功能.以太网卡中数据链路层的芯片称之为MAC控制器.
很多网卡的这两个部分是做到一起的.他们之间的关系是pci总线接mac总线,mac接phy,phy接网线(当然也不是直接接上的,还有一个变压装置).
PHY和MAC是网卡的主要组成部分,网卡一般用RJ-45插口,10M网卡的RJ-45插口也只用了1,2,3,6四根针,而100M或1000M网卡的则是八根针都是全的.
除此以外,还需要其它元件,因为虽然PHY提供绝大多数模拟支持,但在一个典型实现中,仍需外接6,7只分立元件及一个局域网绝缘模块.绝缘模块一般采用一个1:1的变压器.这些部件的主要功能是为了保护PHY免遭由于电气失误而引起的损坏.
另外,一颗CMOS制程的芯片工作的时候产生的信号电平总是大于0V的(这取决于芯片的制程和设计需求),但是这样的信号送到100米甚至更长的地方会有很大的直流分量的损失.而且如果外部网线直接和芯片相连的话,电磁感应(打雷)和静电,很容易造成芯片的损坏.再就是设备接地方法不同,电网环境不同会导致双方的0V电平不一致,这样信号从A传到B,由于A设备的0V电平和B点的0V电平不一样,这样会导致很大的电流从电势高的设备流向电势低的设备.
为了解决以上问题Transformer(隔离变压器)这个器件就应运而生.它把PHY送出来的差分信号用差模耦合的线圈耦合滤波以增强信号,并且通过电磁场的转换耦合到连接网线的另外一端.这样不但使网线和PHY之间没有物理上的连接而换传递了信号,隔断了信号中的直流分量,还可以在不同0V电平的设备中传送数据.
隔离变压器本身就是设计为耐2KV~3KV的电压的.也起到了防雷感应(我个人认为这里用防雷击不合适)保护的作用.有些朋友的网络设备在雷雨天气时容易被烧坏,大都是PCB设计不合理造成的,而且大都烧毁了设备的接口,很少有芯片被烧毁的,就是隔离变压器起到了保护作用.
隔离变压器本身是个被动元件,只是把PHY的信号耦合了到网线上,并没有起到功率放大的作用.那么一张网卡信号的传输的最长距离是谁决定的呢?
一张网卡的传输最大距离和与对端设备连接的兼容性主要是PHY决定的.但是可以将信号送的超过100米的PHY其输出的功率也比较大,更容易产生EMI的问题.这时候就需要合适的Transformer与之配合.作PHY的老大公司Marvell的PHY,常常可以传送180~200米的距离,远远超过IEEE的100米的标准.
RJ-45的接头实现了网卡和网线的连接.它里面有8个铜片可以和网线中的4对双绞(8根)线对应连接.其中100M的网络中1,2是传送数据的,3,6是接收数据的.1,2之间是一对差分信号,也就是说它们的波形一样,但是相位相差180度,同一时刻的电压幅度互为正负.这样的信号可以传递的更远,抗干扰能力强.同样的,3,6也一样是差分信号.
网线中的8根线,每两根扭在一起成为一对.我们制作网线的时候,一定要注意要让1,2在其中的一对,3,6在一对.否则长距离情况下使用这根网线的时候会导致无法连接或连接很不稳定.
现在新的PHY支持AUTO MDI-X功能(也需要Transformer支持).它可以实现RJ-45接口的1,2上的传送信号线和3,6上的接收信号线的功能自动互相交换.有的PHY甚至支持一对线中的正信号和负信号的功能自动交换.这样我们就不必为了到底连接某个设备需要使用直通网线还是交叉网线而费心了.这项技术已经被广泛的应用在交换机和SOHO路由器上.
在1000Basd-T网络中,其中最普遍的一种传输方式是使用网线中所有的4对双绞线,其中增加了4,5和7,8来共同传送接收数据.由于1000Based-T网络的规范包含了AUTOMDI-X功能,因此不能严格确定它们的传出或接收的关系,要看双方的具体的协商结果.
一片网卡主要功能的实现就基本上是上面这些器件了.
其他的,还有一颗EEPROM芯片,通常是一颗93C46.里面记录了网卡芯片的供应商ID,子系统供应商ID,网卡的MAC地址,网卡的一些配置,如SMI总线上PHY的地址,BOOTROM的容量,是否启用BOOTROM引导系统等东西.
很多网卡上还有BOOTROM这个东西.它是用于无盘工作站引导操作系统的.既然无盘,一些引导用必需用到的程序和协议栈就放到里面了,例如RPL,PXE等.实际上它就是一个标准的PCI ROM.所以才会有一些硬盘写保护卡可以通过烧写网卡的BootRom来实现.其实PCI设备的ROM是可以放到主板BIOS里面的.启动电脑的时候一样可以检测到这个ROM并且正确识别它是什么设备的.AGP在配置上和PCI很多地方一样,所以很多显卡的BIOS也可以放到主板BIOS里面.这就是为什么板载的网卡我们从来没有看到过BOOTROM的原因.
最后就是电源部分了.大多数网卡现在都使用3.3V或更低的电压.有的是双电压的.因此需要电源转换电路.
而且网卡为了实现Wake on line功能,必须保证全部的PHY和MAC的极少一部分始终处于有电的状态,这需要把主板上的5V Standby电压转换为PHY工作电压的电路.在主机开机后,PHY的工作电压应该被从5V转出来的电压替代以节省5V Standby的消耗.(许多劣质网卡没有这么做).
有Wake on line功能的网卡一般还有一个WOL的接口.那是因为PCI2.1以前没有PCI设备唤醒主机的功能,所以需要着一根线通过主板上的WOL的接口连到南桥里面以实现WOL的功能.新的主板合网卡一般支持PCI2.2/2.3,扩展了PME#信号功能,不需要那个接口而通过PCI总线就可以实现唤醒功能.
我们现在来看两个图
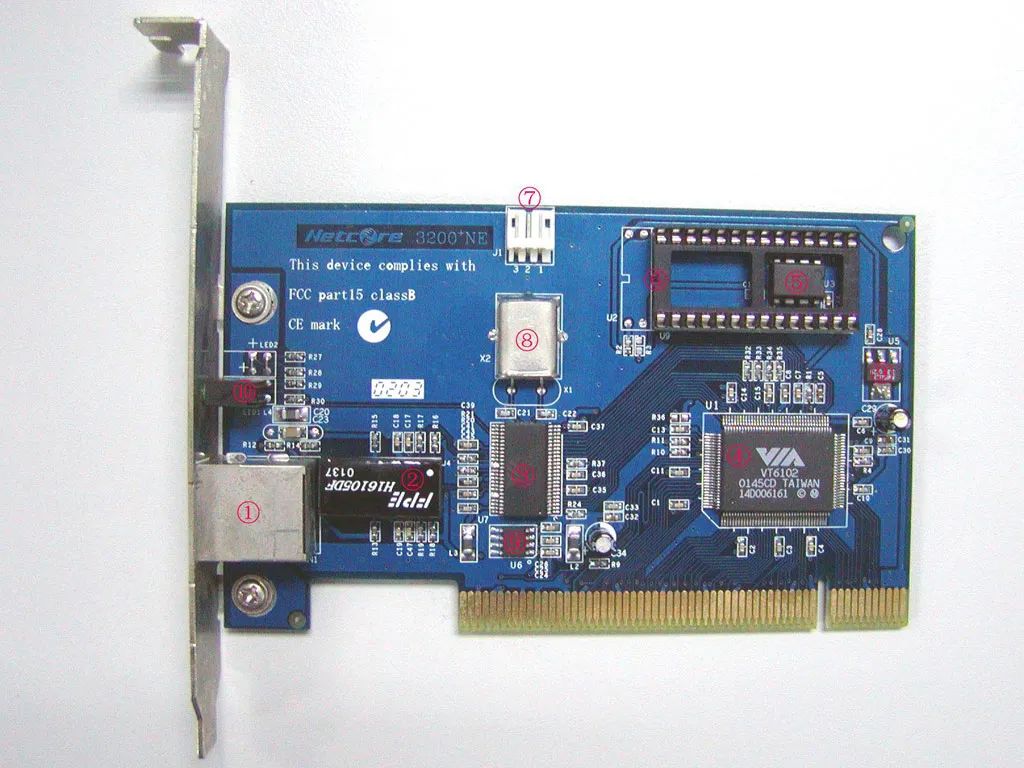
MAC和PHY分开的以太网卡
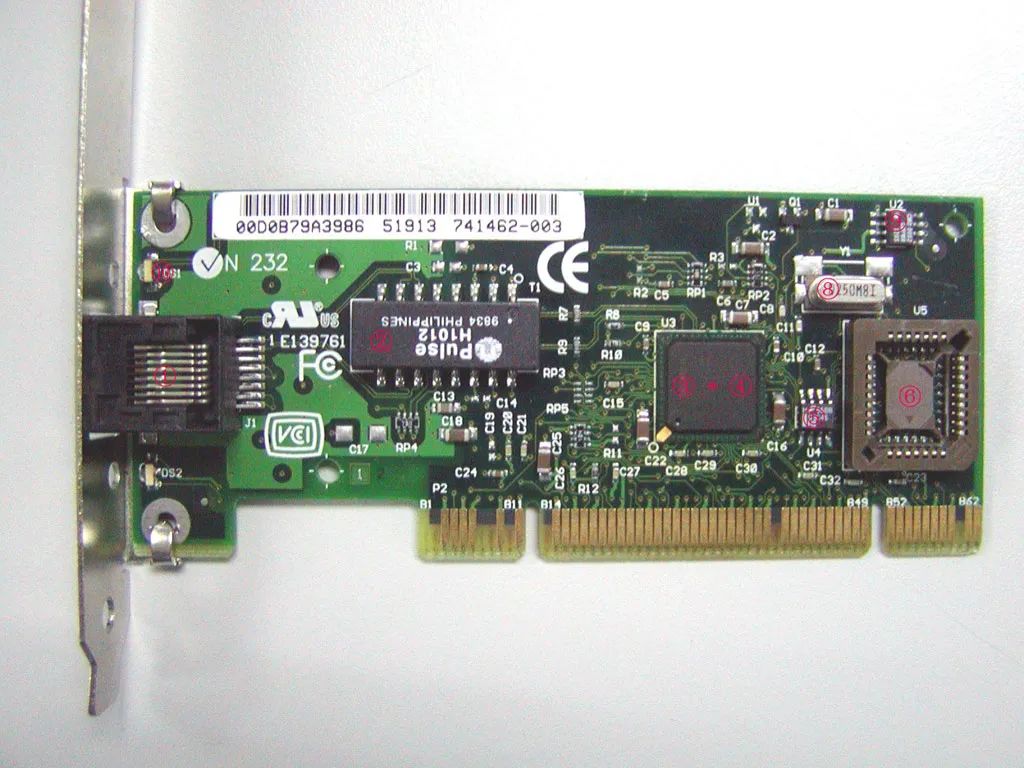
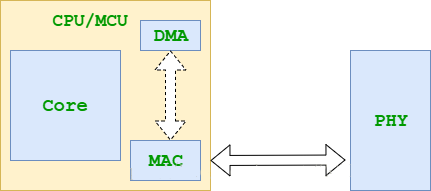
MAC和PHY集成在一颗芯片的以太网卡
上图中各部件为:
①RJ-45接口
②Transformer(隔离变压器)
③PHY芯片
④MAC芯片
⑤EEPROM
⑥BOOTROM插槽
⑦WOL接头
⑧晶振
⑨电压转换芯片
⑩LED指示灯
网卡的功能主要有两个:一是将电脑的数据封装为帧,并通过网线(对无线网络来说就是电磁波)将数据发送到网络上去;二是接收网络上其它设备传过来的帧,并将帧重新组合成数据,发送到所在的电脑中.网卡能接收所有在网络上传输的信号,但正常情况下只接受发送到该电脑的帧和广播帧,将其余的帧丢弃.然后,传送到系统CPU做进一步处理.当电脑发送数据时,网卡等待合适的时间将分组插入到数据流中.接收系统通知电脑消息是否完整地到达,如果出现问题,将要求对方重新发送.
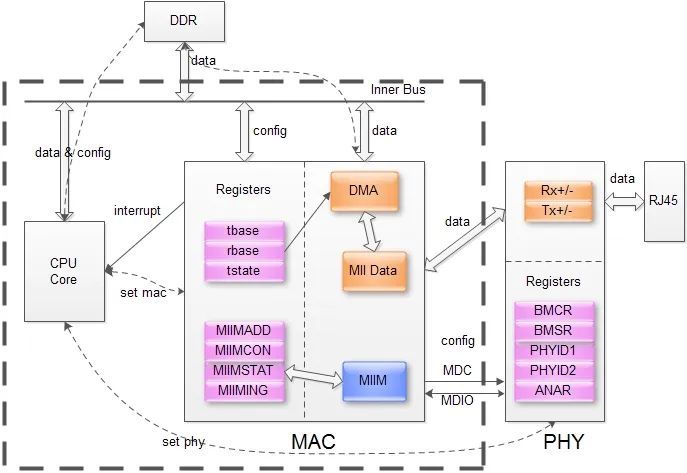
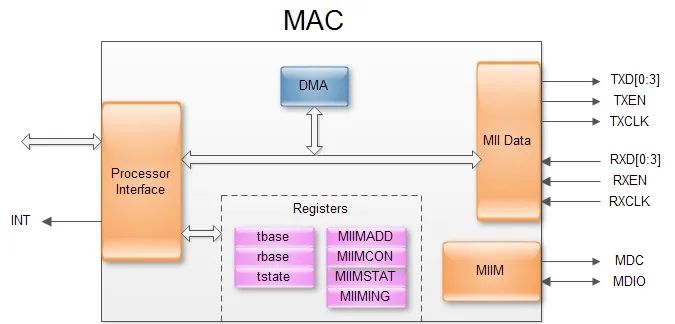
通过IEEE定义的标准的MII/GigaMII(Media Independed Interfade,介质独立界面)界面连接MAC和PHY。这个界面是IEEE定义的。MII界面传递了网络的所有数据和数据的控制。
而MAC对PHY的工作状态的确定和对PHY的控制则是使用SMI(Serial Management Interface)界面通过读写PHY的寄存器来完成的。PHY里面的部分寄存器也是IEEE定义的,这样PHY把自己的目前的状态反映到寄存器里面,MAC通过SMI总线不断的读取PHY的状态寄存器以得知目前PHY的状态,例如连接速度,双工的能力等。当然也可以通过SMI设置PHY的寄存器达到控制的目的,例如流控的打开关闭,自协商模式还是强制模式等。
我们看到了,不论是物理连接的MII界面和SMI总线还是PHY的状态寄存器和控制寄存器都是有IEEE的规范的,因此不同公司的MAC和PHY一样可以协调工作。当然为了配合不同公司的PHY的自己特有的一些功能,驱动需要做相应的修改。
一片网卡主要功能的实现就基本上是上面这些器件了。
其他的,还有一颗EEPROM芯片,通常是一颗93C46。里面记录了网卡芯片的供应商ID、子系统供应商ID、网卡的MAC地址、网卡的一些配置,如SMI总线上PHY的地址,BOOTROM的容量,是否启用BOOTROM引导系统等东西。
很多网卡上还有BOOTROM这个东西。它是用于无盘工作站引导操作系统的。
既然无盘,一些引导用必需用到的程序和协议栈就放到里面了,例如RPL、PXE等。实际上它就是一个标准的PCI ROM。所以才会有一些硬盘写保护卡可以通过烧写网卡的BootRom来实现。
其实PCI设备的ROM是可以放到主板BIOS里面的。启动电脑的时候一样可以检测到这个ROM并且正确识别它是什么设备的。AGP在配置上和PCI很多地方一样,所以很多显卡的BIOS也可以放到主板BIOS里面。这就是为什么板载的网卡我们从来没有看到过BOOTROM的原因。
end
一口Linux
关注,回复【1024】海量Linux资料赠送
精彩文章合集
文章推荐