作者 | 不可说
出品 | 汽车电子与软件
现在汽车车窗基本都是电动控制的,只不过功能上会有些区别,一般会有两种类别:
1、电动升降
2、一键升降+车窗防夹
无论哪种都需要电机去完成,通过机械结构,将电机的旋转运动转换为车窗的升降直线运动,可参考下面的机械结构示意图:
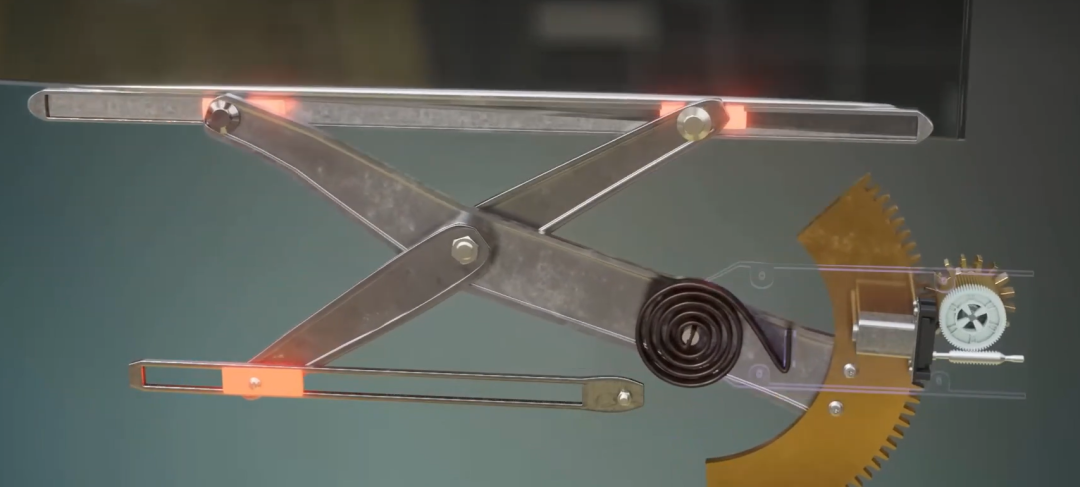
车窗控制的机械结构示意图
对于只支持电动升降的车窗来说,使用直流有刷电机就可以了,扭矩高、成本低。对于支持一键升降+车窗防夹功能的车窗来说,对电机就有了一个关键要求,那就是对电机位置的感应,电机需要能够反馈自身的旋转位置,控制器才可以判断其当前位置相对于车窗升降移动空间中所对应的位置。才能够实现一键升降,有了一键升降功能,避免车窗上升中意外夹到异物,就需要做防夹处理,因此从控制和实现上也会有些复杂。
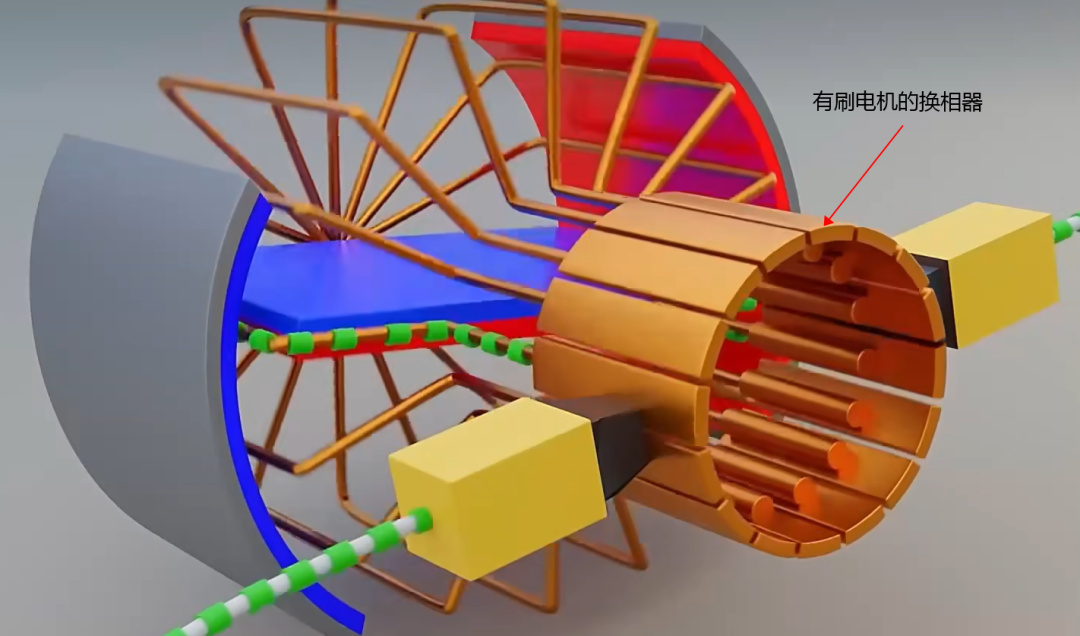
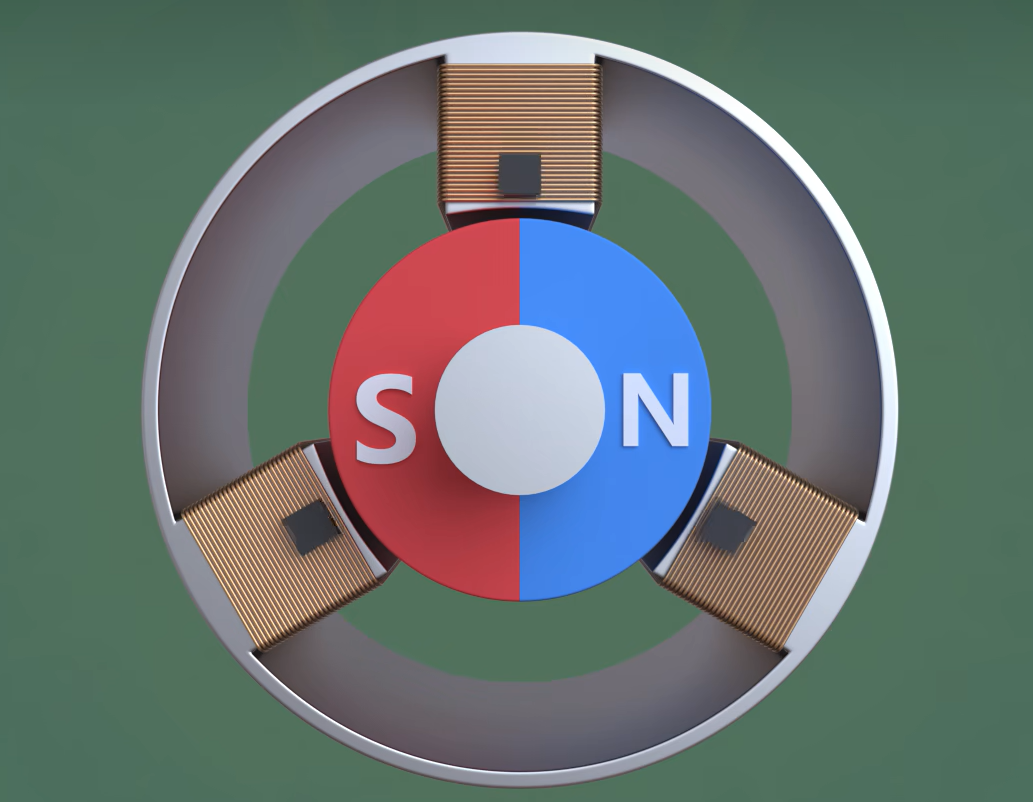
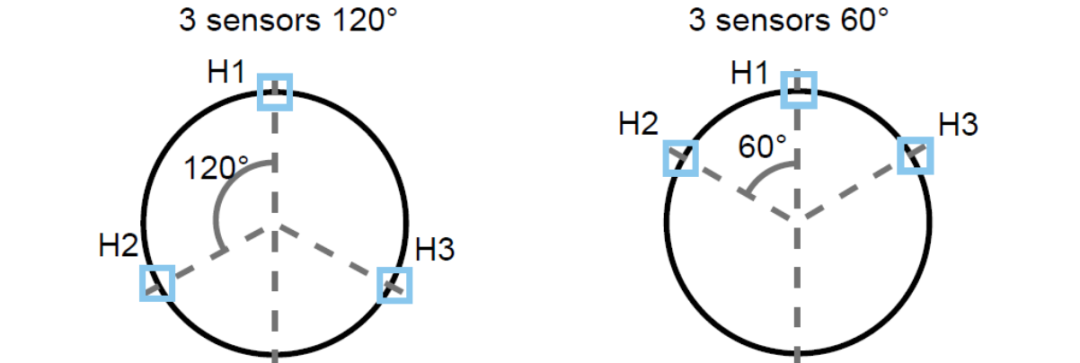
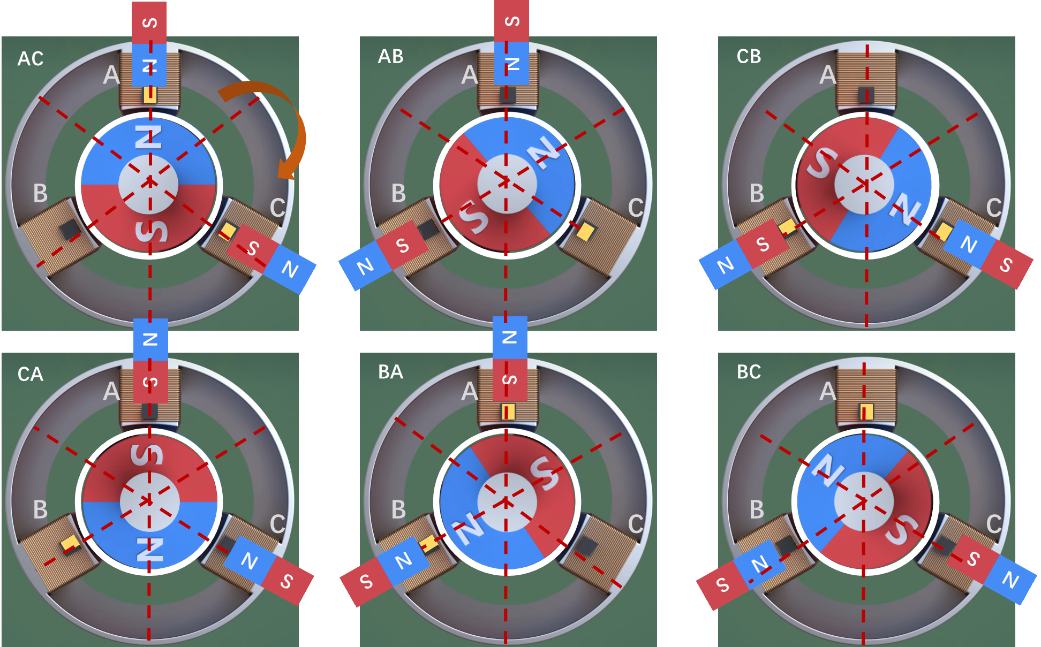
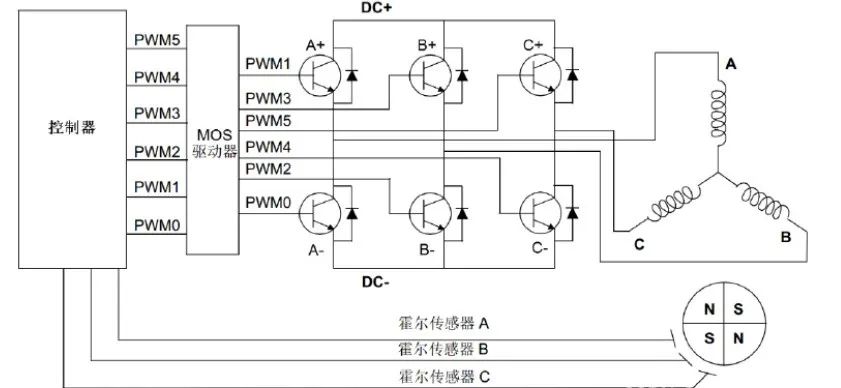
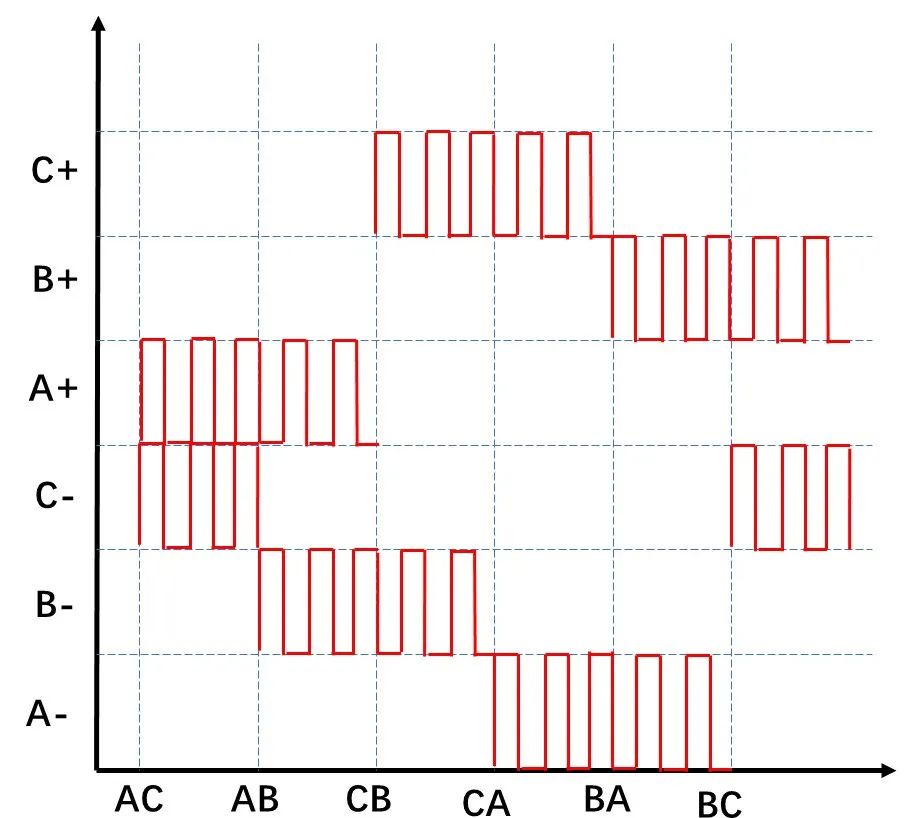
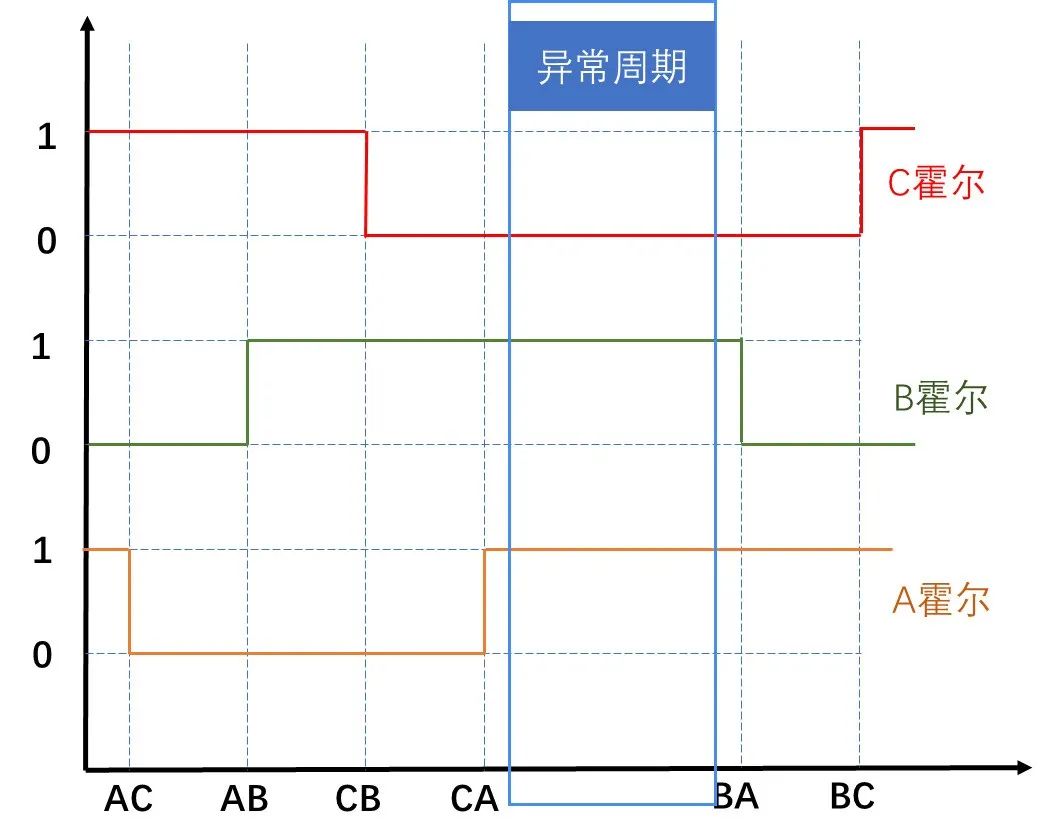
为了实现车窗的一键升降,可以使用无刷直流电机,那么就要对比下有刷电机: 有刷电机外围固定的定子上是永磁体,中间旋转的转子是线圈绕组,通电产生磁场,与定子磁场相互作用,产生使其旋转的作用力,为了使得作用力一直存在,就需要对绕组的通电方向进行改变,因此需要一个换相器来改变电源方向,而无刷直流电机则不需要这个换相器。无刷直流电机要转动,需要根据位置传感器的输出信号确认转子位置。然后通过电子换相电路去驱动电机本体使定子电枢绕组依次换相通电,从而在定子电枢绕组上产生旋转磁场,旋转磁场与转子永磁体相互作用驱动转子转动。电机持续的转动依赖于电机的准确换相,电机换相的时机只取决于转子的位置信号。霍尔电机是直流无刷电机中应用最多最广泛的一个分类;霍尔电机就是带霍尔传感器的直流无刷电机。通过使用霍尔传感器或其他位置传感器检测转子的位置,电子控制器(驱动器)根据转子的位置控制定子线圈的通电顺序,产生旋转磁场以驱动转子旋转。整个直流无刷霍尔电机(BLDC)的核心部件之一是其中间的转子,该转子由永磁体镶嵌在铁心的表面或者嵌入铁心的内部而构成。这种设计使得转子能够高效地在磁场中旋转,从而驱动电机的运行。电机的定子部分则是由多层硅钢片经过精密的叠压和轴向冲压工艺制作而成。这样的结构不仅增强了定子的机械强度,还显著减少了涡流损耗,提高了电机的效率。在定子的每一个经过冲压形成的槽内,都按照一定的规律绕制有线圈,这些线圈组合在一起形成了绕组。当这些绕组通电时,它们会产生一个强大的磁场,这个磁场会与转子上的永磁体相互作用,从而驱动转子旋转。值得注意的是,大多数直流无刷霍尔电机的定子都设计有3个或6个绕组,这些绕组通常以星形(Y形)的方式排列。霍尔效应是一种电磁效应,当固体导体放置在一个磁场内,且有电流通过时,导体内的电荷载流子受到洛伦兹力而偏向一边,继而产生电压(霍尔电压)的现象。这个电压所引致的电场力会平衡洛伦兹力。霍尔传感器就是利用霍尔效应制作的一种磁场感应传感器。只要转子的磁极掠过霍尔元件,根据转子当前的极性,霍尔元件会输出对应逻辑电平0或1,比如说有正向磁场通过霍尔元器件,传感器就会输出1,有反向磁场通过霍尔元器件,传感器就会输出0,磁场这样只要根据三个霍尔元件产生的电平,就可以判断当前转子的位置,决定电机换相的顺序。霍尔电机中,霍尔传感器有三个,会有两种布局,间隔120度或者间隔60度,间隔120度的安装方式较多。通常直接在电机的定子上安装,可以检测转子位置。 这里定子和霍尔传感器均用A、B、C来表示,均成120度布置。且霍尔传感器和定子线圈同位置、同角度。那么一个周期内定子通电后状态、霍尔传感器状态、转子运动状态,可由下方图示说明。假定初始位置如AC图所示,对定子上的A线圈通正向电,C线圈通反向电,如果A线圈的对内相当于一个磁体的N极,那么C线圈对内相当于一个磁体的S极,对于转子来讲,A线圈对其有一个排斥力,C线圈对转子S极有斥力、对N极有吸引力,所以转子会向顺时针方向转动;一开始,转子运动到AC位置时,N极正对着霍尔A,此时代表着霍尔A传感器的输出数值切换点,也就是达到了定子电子换相点,因此会控制电源供电情况切换为AC时的状态。 在运动到AB位置过程中,此时A霍尔传感器由激活切换为不激活状态,C霍尔传感器一直处于激活状态,到了AB位置后,S极正对着霍尔B,此时代表着B霍尔传感器的输出数值切换点,也达到了定子电子换相点,会控制电源供电情况切换为AB时的状态,即对定子上的A线圈通正向电,B线圈通反向电,根据磁场力的作用,转子会运动到CB位置,在这个过程中,B霍尔传感器变为激活,C霍尔传感器一直处于激活,到达CB位置时,转子N极正对着霍尔C传感器,这个位置之后,C霍尔传感器状态切换,也就达到了电源换相点,控制电源切换为图示CB中的状态效果。后续CB->CA->BA->BC->AC->AB->…依次循环。在转子循环一周的过程中,ABC三个霍尔传感器的反馈数值如下:在一个完整的电周期内,三相霍尔传感器所产生的开关状态是互不重复的,这意味着每一个特定的开关状态都占据了一个固定的且相等的电角度份额。这一特性确保了电机控制的精确性和稳定性。在上面的示例中,三个霍尔传感器120度等角度间隔,它们的输出信号相位彼此之间相差120°电角度。这种相位差异是电机控制策略中的关键要素。每当电机转子转过60°电角度时,就会有一个霍尔传感器的状态发生变化,这种变化为电机控制系统提供了必要的反馈信息。 进一步地,在一个完整的电周期内,这三个霍尔传感器的信号组合会呈现出六种不同的状态。这六种状态不仅反映了电机转子的当前位置,而且与“六步换相”控制策略紧密相连。所谓“六步换相”,是指电机在运转过程中,通过依次改变六个不同的通电状态,来实现电机的连续旋转。每一个通电状态都对应着霍尔传感器的一种特定组合,从而确保了电机能够按照预定的方向和速度进行平稳运转。对应的位置、角度、状态可参考下表:那么上面的电源信号控制与霍尔信号的反馈是如何实现的呢?首先是霍尔传感器将感应信号值反馈给控制器,控制器根据其位置信息,通过MOS驱动器,驱动不同的MOS管导通,实现供电及变相。全桥逆变电路驱动定子绕组依次通电通常采用PWM调制方式,比如对应上面例子中AC位置时,可以使得A+和C- MOS管导通,只不过可以选择PWM调制时全导通,还是轮换导通。 可以使得每个导通状态控制器上(A+、B+、C+)、下桥臂(A-、B-、C-)功率管全部进行PWM调制,对应的电源相位控制表可参考如下图示:也可以采用上桥臂功率管ON(全通状态)、下桥臂功率管PWM控制方式,或者上桥臂功率管PWM、下桥臂功率管ON控制方式;还有一大类是功率管在导通的区间内轮换导通,包括两种方式:PWM-ON方式和ON-PWM方式。比如ON-PWM方式: 另外,如果要实现电机反转,则参考相位位置,按照相反顺序供电即可。车窗防夹功能是现代汽车中一项重要的安全设计,它主要分为两种类型。第一种类型是通过检测车窗电机的电流变化来实现防夹的。在车窗升降的过程中,如果遇到了障碍物,电机的负载会增加,从而导致电流变大。系统通过监测这种电流变化,可以及时发现并响应障碍物的存在,从而避免车窗夹住物体或人员。而另一种类型则是通过检测纹波来实现防夹的。这里的纹波指的是电机霍尔传感器在磁场变化时产生的信号波动。当车窗遇到障碍物时,电机的运转状态会发生变化,进而影响到霍尔传感器所检测到的磁场。这种变化会导致霍尔传感器产生异常的纹波信号。虽然这种方法的处理难度相对较大,但它具有非常高的灵敏度,能够更准确地检测到障碍物的存在。在车窗升降过程中,如果霍尔传感器检测到了异常的磁场变化或电机反馈信号,控制器会立即触发反向动作,使车窗停止上升或下降,并可能自动下降一小段距离,以释放被夹住的物体或人员。当车窗触发防夹功能时,霍尔传感器上会出现一个单个比较宽的方波(即霍尔电压)。这个方波的出现,意味着霍尔传感器所检测到的磁场发生了异常变化。同时,对应的霍尔传感器反馈回来的位置信息也会出现迟滞,即出现异常的周期。这种异常的信号变化,是控制器判断车窗是否遇到障碍物并触发防夹功能的重要依据。如上图所示,当车窗遇到障碍物并触发防夹功能时,霍尔传感器的信号波形会发生明显的变化。这种变化为控制器提供了准确的判断依据,使其能够迅速响应并采取相应的措施,确保车窗的安全使用。