微信公众号:OpenCV学堂
关注获取更多计算机视觉与深度学习知识
自从YOLOv5更新成7.0版本,YOLOv8、YOLO11推出以后,OpenCV4.6以前的版本都无法再加载导出ONNX格式模型了,只有OpenCV4.7以上版本才可以支持最新版本YOLOv5、YOLOv8、YOLO11模型的推理部署。首先看一下最新版本的YOLO11的输入与输出格式: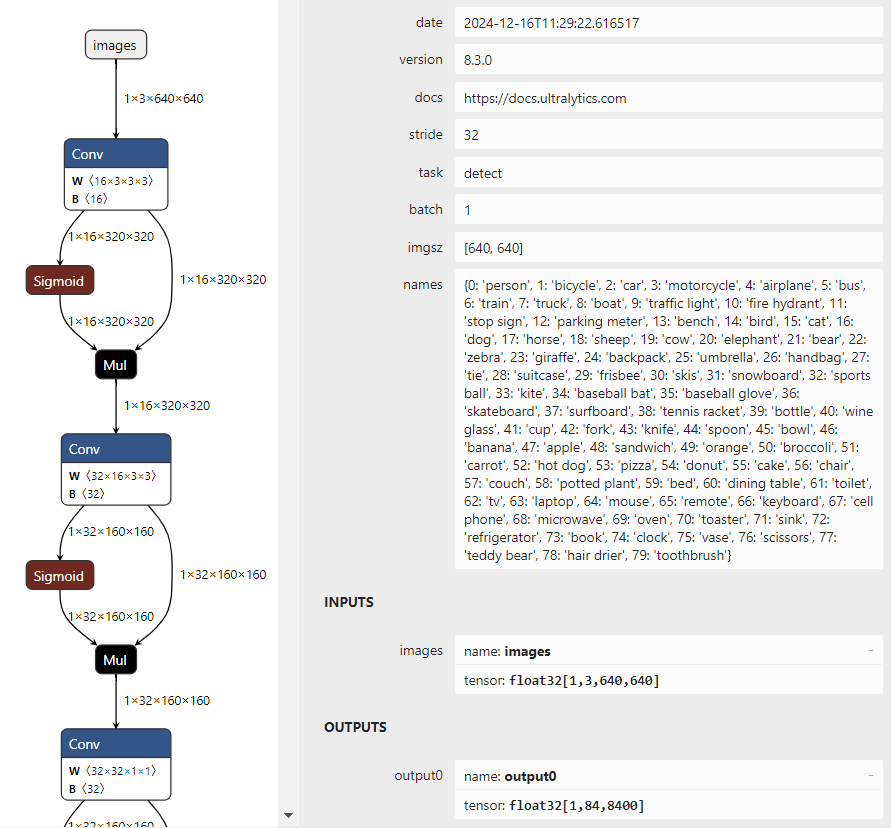
就会发现,跟YOLOv8输入与输出结果完全一致,没有什么改变。
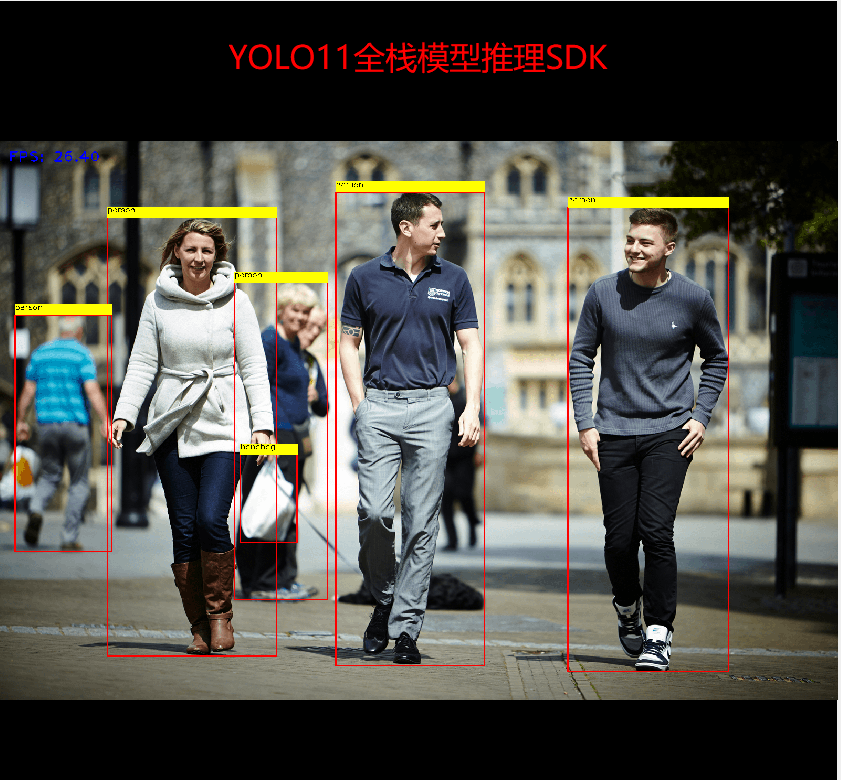
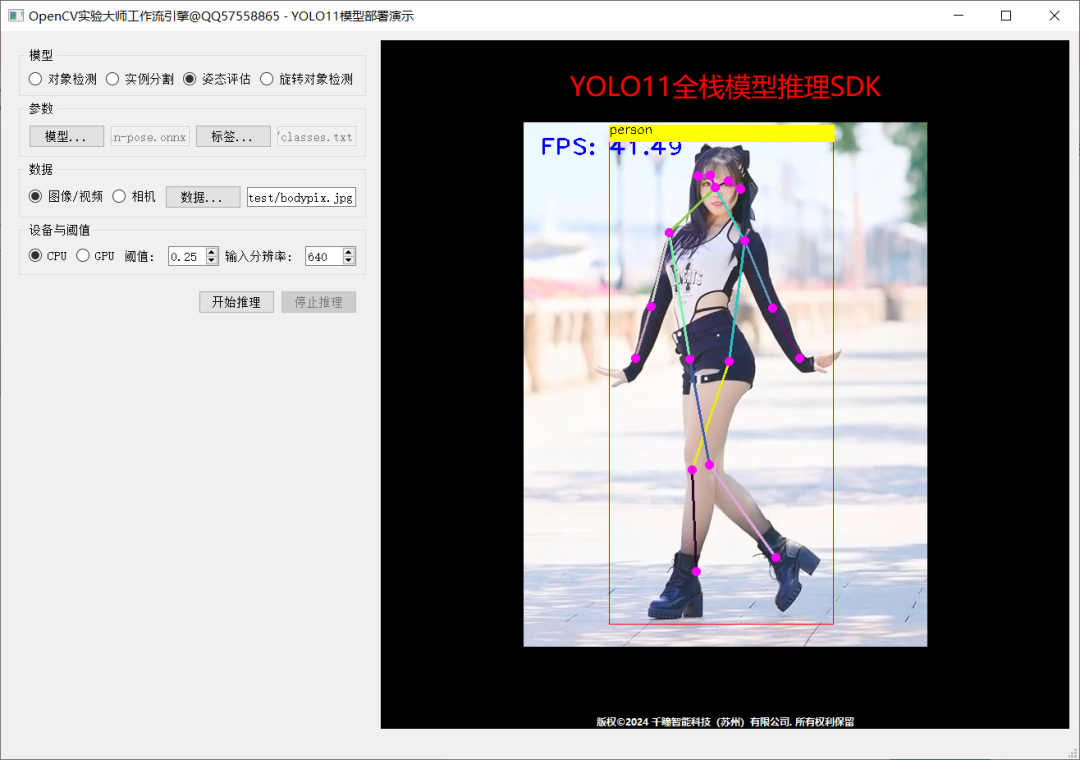
推理演示截图:

代码已经全部测试过了,可以直接调用:
#include
#include
#include
std::string label_map = "D:/python/yolov5-7.0/classes.txt";
int main(int argc, char** argv) {
std::vector<std::string> classNames;
std::ifstream fp(label_map);
std::string name;
while (!fp.eof()) {
getline(fp, name);
if (name.length()) {
classNames.push_back(name);
}
}
fp.close();
std::vector<cv::Scalar> colors;
colors.push_back(cv::Scalar(0, 255, 0));
colors.push_back(cv::Scalar(0, 255, 255));
colors.push_back(cv::Scalar(255, 255, 0));
colors.push_back(cv::Scalar(255, 0, 0));
colors.push_back(cv::Scalar(0, 0, 255));
std::string onnxpath = "D:/projects/yolov8n.onnx";
auto net = cv::dnn::readNetFromONNX(onnxpath);
net.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV);
net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
cv::VideoCapture capture("D:/images/video/sample.mp4");
cv::Mat frame;
while (true) {
bool ret = capture.read(frame);
if (frame.empty()) {
break;
}
int64 start = cv::getTickCount();
// 图象预处理 - 格式化操作
int w = frame.cols;
int h = frame.rows;
int _max = std::max(h, w);
cv::Mat image = cv::Mat::zeros(cv::Size(_max, _max), CV_8UC3);
cv::Rect roi(0, 0, w, h);
frame.copyTo(image(roi));
float x_factor = image.cols / 640.0f;
float y_factor = image.rows / 640.0f;
// 推理
cv::Mat blob = cv::dnn::blobFromImage(image, 1 / 255.0, cv::Size(640, 640), cv::Scalar(0, 0, 0), true, false);
net.setInput(blob);
cv::Mat preds = net.forward();
// 后处理, 1x84x8400
cv::Mat outs(preds.size[1], preds.size[2], CV_32F, preds.ptr());
cv::Mat det_output = outs.t();
float confidence_threshold = 0.5;
std::vector<cv::Rect> boxes;
std::vector classIds;
std::vector confidences;
for (int i = 0; i < det_output.rows; i++) {
cv::Mat classes_scores = det_output.row(i).colRange(4, preds.size[1]);
cv::Point classIdPoint;
double score;
minMaxLoc(classes_scores, 0, &score, 0, &classIdPoint);
// 置信度 0~1之间
if (score > 0.25)
{
float cx = det_output.at(i, 0);
float cy = det_output.at(i, 1);
float ow = det_output.at(i, 2);
float oh = det_output.at(i, 3);
int x = static_cast((cx - 0.5 * ow) * x_factor);
int y = static_cast((cy - 0.5 * oh) * y_factor);
int width = static_cast(ow * x_factor);
int height = static_cast(oh * y_factor);
cv::Rect box;
box.x = x;
box.y = y;
box.width = width;
box.height = height;
boxes.push_back(box);
classIds.push_back(classIdPoint.x);
confidences.push_back(score);
}
}
// NMS
std::vector indexes;
cv::dnn::NMSBoxes(boxes, confidences, 0.25, 0.50, indexes);
for (size_t i = 0; i < indexes.size(); i++) {
int index = indexes[i];
int idx = classIds[index];
cv::rectangle(frame, boxes[index], colors[idx % 5], 2, 8);
cv::rectangle(frame, cv::Point(boxes[index].tl().x, boxes[index].tl().y - 20),
cv::Point(boxes[index].br().x, boxes[index].tl().y), cv::Scalar(255, 255, 255), -1);
cv::putText(frame, classNames[idx], cv::Point(boxes[index].tl().x, boxes[index].tl().y - 10), cv::FONT_HERSHEY_SIMPLEX, .5, cv::Scalar(0, 0, 0));
}
float t = (cv::getTickCount() - start) / static_cast(cv::getTickFrequency());
putText(frame, cv::format("FPS: %.2f", 1.0 / t), cv::Point(20, 40), cv::FONT_HERSHEY_PLAIN, 2.0, cv::Scalar(255, 0, 0), 2, 8);
char c = cv::waitKey(1);
if (c == 27) {
break;
}
cv::imshow("OpenCV4.8 + YOLOv8", frame);
}
cv::waitKey(0);
cv::destroyAllWindows();
return 0;
}
系统化掌握QT应用开发技能与相关软件工程知识,掌握QT桌面应用开发常用的UI组件、元数据系统、多线程、设计模式、学会基于OpenCV实验大师工具软件与工作流引擎库高效开发OpenCV算法与QT界面集成,YOLOv8系列模型多线程推理集成、完成人脸识别、读码、模板匹配、测量、Blob检测、圆检测、线段检测、轮廓查找、安防入侵检测、健身计数、电子围栏系统、乌班图嵌入式开发板QT+深度学习 + OpenCV4.8 人脸识别、自动水印移除等应用开发与移植案例。课程总结课时数超过80+,提供了超过100页详细电子文档,近万行C++代码,数十个各种QT+OpenCV+深度学习 案例,提供电子书资料。对标工作岗位,快人一步,学完就入职。需要掌握QT5 + OpenCV的开发者、高校高年级本科生与研究生、需要完成深度学习应用开发的开发者、上位机开发者。
推荐阅读
OpenCV4.8+YOLOv8对象检测C++推理演示
ZXING+OpenCV打造开源条码检测应用
攻略 | 学习深度学习只需要三个月的好方法
三行代码实现 TensorRT8.6 C++ 深度学习模型部署
实战 | YOLOv8+OpenCV 实现DM码定位检测与解析
对象检测边界框损失 – 从IOU到ProbIOU
初学者必看 | 学习深度学习的五个误区