

通过网盘分享的文件:fr30xxc_sdk__202411(1).zip
链接: https://pan.baidu.com/s/1XyNkwqjrxEVSexzCbyYooQ?pwd=tmri 提取码: tmri
--来自百度网盘超级会员v3的分享
前面我们分享了micropython的移植,至此还只有一些内置的模块,我们现在开始就来移植平台相关的模块,先以最简单IO驱动LED为例。
以下是前文一些补充

遇到\n输出为\r\n
这样原来只有\n换行的地方,可以回车到行首再换行就会对齐了。
uint32_t uart_send(uint8_t* buffer, uint32_t len){g_data_transmit_flag = false;for(uint32_t i=0;i<len;i++){if(buffer[i]=='\n'){putchar('\r');}putchar(buffer[i]);}return len;}
mpconfigport.h中配置
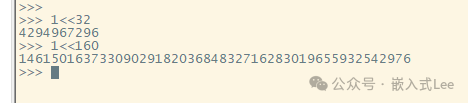
#define MICROPY_LONGINT_IMPL MICROPY_LONGINT_IMPL_MPZ
原来1<<32不支持
现在1<<32可以正常输出,甚至1<<160都可以
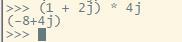
mpconfigport.h中配置
#define MICROPY_PY_BUILTINS_COMPLEX (1)
import math
math.按tab按键
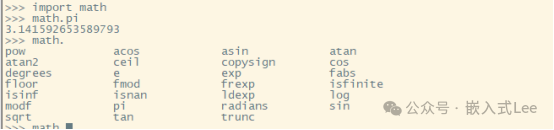
配置
#define MICROPY_PY_MATH (1)
#define MICROPY_PY_CMATH (1)
#define MICROPY_PY_BUILTINS_FLOAT (1)
#define MICROPY_FLOAT_IMPL (MICROPY_FLOAT_IMPL_DOUBLE)
genhdr\moduledefs.h中可以看到注册了math模块。
#define MICROPY_REGISTERED_MODULES \
MODULE_DEF_BUILTINS \
MODULE_DEF_CMATH \
MODULE_DEF_GC \
MODULE_DEF_MATH \
MODULE_DEF_MICROPYTHON \
MODULE_DEF_SYS \
MODULE_DEF___MAIN__ \
extern const struct _mp_obj_module_t mp_module_math;
#undef MODULE_DEF_MATH
#define MODULE_DEF_MATH { MP_ROM_QSTR(MP_QSTR_math), MP_ROM_PTR(&mp_module_math) },
mp_module_math在
py\modmath.c中实现
前文我们看到需要genhdr下自动生成的头文件,之前是通过从其他已经构建的地方复制过来的。其中genhdr/qstrdefs.generated.h定义了关键词对应的hash值,通过hash值来快速索引关键词,这个文件是通过python脚本生成的,对于支持的构建环境是自动调用脚本生成。而我们移植到MDK目前还没去添加对应的脚本(MDK也是可以配置执行脚本的,后面可以再完善),我们这一小节就来介绍下在新增关键词后如何手动更新该文件。
参考docs\develop\qstr.rst
从支持的构建环境的构建过程可以看到它是通过脚本命令生成的,参考
ports\windows\msvc\genhdr.targets可以看到其具体生成过程
其中如下位置指定文件qstrdefscollected.h
<QstrDefsCollected>$(DestDir)qstrdefscollected.hQstrDefsCollected>
该文件由以下命令产生
<Exec Command="$(PyPython) $(PySrcDir)makeqstrdefs.py split qstr $(DestDir)qstr.i.last $(DestDir)qstr _"/>
<Exec Command="$(PyPython) $(PySrcDir)makeqstrdefs.py cat qstr _ $(DestDir)qstr $(QstrDefsCollected)"/>
对应
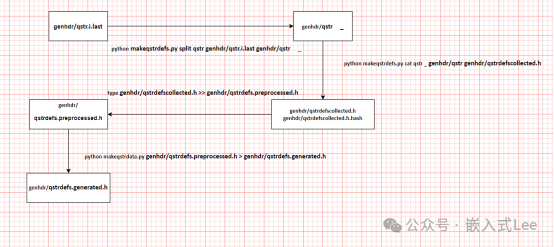
python makeqstrdefs.py split qstr genhdr/qstr.i.lastgenhdr/qstr _
makeqstrdefs.py使用格式如下usage: makeqstrdefs.py command mode input_filename output_dir output_file
即将genhdr/qstr.i.last文件生成到qstr下,使用split命令qstr模式。
qstr.i.last先使用基础版本,最后再手动添加新内容。
python makeqstrdefs.py cat qstr _ genhdr/qstr genhdr/qstrdefscollected.h
再
<Exec Command="$(PyClTool) /nologo /I@(PyIncDirs, ' /I') /D@(PreProcDefs, ' /D') /E $(PyQstrDefs) $(QstrDefs) > $(DestDir)qstrdefs.preprocessed.h"/>
<Exec Command="type $(QstrDefsCollected) >> $(DestDir)qstrdefs.preprocessed.h"/>
<Exec Command="$(PyPython) $(PySrcDir)makeqstrdata.py $(DestDir)qstrdefs.preprocessed.h > $(TmpFile)"/>
对应
type genhdr/qstrdefscollected.h >> genhdr/qstrdefs.preprocessed.h
python makeqstrdata.py genhdr/qstrdefs.preprocessed.h > genhdr/qstrdefs.generated.h
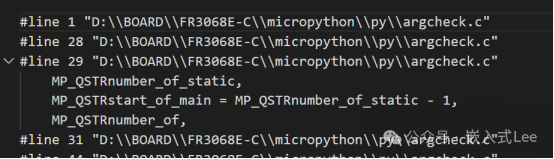
前面原始输入文件是genhdr\qstr.i.last该文件由编译器产生,格式类似于
(# n "file") GCC产生的
(#line n "file") MSVC产生的
那么如何产生这个文件呢,qstr.i.last由编译器的预处理器产生,
对if等条件编译删除,宏展开,添加行信息
需要添加-DNO_QSTR编译选项
py\mkrules.mk中qstr.i.last由
如下命令生成
$(HEADER_BUILD)/qstr.i.last:$(SRC_QSTR) $(QSTR_GLOBAL_DEPENDENCIES) |$(QSTR_GLOBAL_REQUIREMENTS)
$(ECHO) "GEN$@"
$(Q)$(PYTHON) $(PY_SRC)/makeqstrdefs.py pp$(CPP) output$(HEADER_BUILD)/qstr.i.last cflags$(QSTR_GEN_CFLAGS) cxxflags$(QSTR_GEN_CXXFLAGS) sources$^ dependencies$(QSTR_GLOBAL_DEPENDENCIES) changed_sources$?
我们无需从头开始,只需要修改原来的
genhdr\qstrdefs.preprocessed.h添加
新的字符串
然后执行python makeqstrdata.py genhdr/qstrdefs.preprocessed.h > genhdr/qstrdefs.generated.h生成即可。

整个过程如下,我们手动修改qstrdefs.preprocessed.h执行最后一步生成genhdr/qstrdefs.generated.h
我们参考参考已有的示例去做,参考
ports\stm32\modpyb.c
ports\stm32\led.h
ports\stm32\led.c
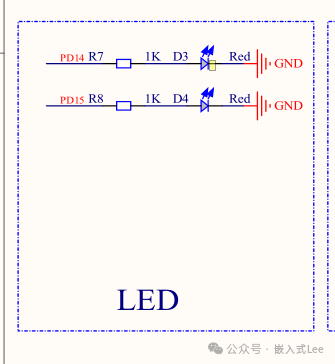
这一部分和具体的硬件平台相关,我们这里由两个LED
先实现LED控制IO的初始化
app_micropython.c中
#include "fr30xx.h"#include "FreeRTOS.h"#include "task.h"#include "app_micropython.h"TaskHandle_t micropython_task_handle;extern int py_main(int argc, char **argv);static void micropython_task(void *arg);static void led_init(void){GPIO_InitTypeDef gpio_config;__SYSTEM_GPIOD_CLK_ENABLE();gpio_config.Pin = GPIO_PIN_14 | GPIO_PIN_15;gpio_config.Mode = GPIO_MODE_OUTPUT_PP;gpio_config.Pull = GPIO_PULLUP;gpio_config.Alternate = GPIO_FUNCTION_0;gpio_init(GPIOD, &gpio_config);}void app_micropython_init(void){xTaskCreate(micropython_task, "micropython", 2048*2, NULL, 3, µpython_task_handle);}static void micropython_task(void *arg){led_init();py_main(0,0);}
然后实现LED的控制接口
py_port\mphalport.c中
#include "py/mphal.h"#include "mphalport.h"#include "fr30xx.h"void mp_hal_pin_low(mp_uint_t id){if(id==1){gpio_write_pin(GPIOD,GPIO_PIN_14,GPIO_PIN_CLEAR);}else if(id == 2){gpio_write_pin(GPIOD,GPIO_PIN_15,GPIO_PIN_CLEAR);}else{}}void mp_hal_pin_high(mp_uint_t id){if(id==1){gpio_write_pin(GPIOD,GPIO_PIN_14,GPIO_PIN_SET);}else if(id == 2){gpio_write_pin(GPIOD,GPIO_PIN_15,GPIO_PIN_SET);}else{}}void mp_hal_pin_toogle(mp_uint_t id){if(id==1){if(gpio_read_pin(GPIOD,GPIO_PIN_14)){gpio_write_pin(GPIOD,GPIO_PIN_14,GPIO_PIN_SET);}else{gpio_write_pin(GPIOD,GPIO_PIN_14,GPIO_PIN_CLEAR);}}else if(id == 2){if(gpio_read_pin(GPIOD,GPIO_PIN_15)){gpio_write_pin(GPIOD,GPIO_PIN_14,GPIO_PIN_SET);}else{gpio_write_pin(GPIOD,GPIO_PIN_15,GPIO_PIN_CLEAR);}}else{}}
py_port\mphalport.h中
#ifndef MICROPY_MPHALPORT_H#define MICROPY_MPHALPORT_Hstatic inline mp_uint_t mp_hal_ticks_ms(void) {return 0;}static inline void mp_hal_set_interrupt_char(char c) {}void mp_hal_pin_low(mp_uint_t id);void mp_hal_pin_high(mp_uint_t id);void mp_hal_pin_toogle(mp_uint_t id);#endif
构建实例
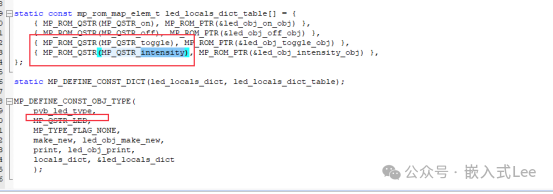
static MP_DEFINE_CONST_FUN_OBJ_1(led_obj_on_obj, led_obj_on);static MP_DEFINE_CONST_FUN_OBJ_1(led_obj_off_obj, led_obj_off);static MP_DEFINE_CONST_FUN_OBJ_1(led_obj_toggle_obj, led_obj_toggle);static const mp_rom_map_elem_t led_locals_dict_table[] = {{ MP_ROM_QSTR(MP_QSTR_on), MP_ROM_PTR(&led_obj_on_obj) },{ MP_ROM_QSTR(MP_QSTR_off), MP_ROM_PTR(&led_obj_off_obj) },{ MP_ROM_QSTR(MP_QSTR_toggle), MP_ROM_PTR(&led_obj_toggle_obj) },};static MP_DEFINE_CONST_DICT(led_locals_dict, led_locals_dict_table);MP_DEFINE_CONST_OBJ_TYPE(pyb_led_type,MP_QSTR_LED,MP_TYPE_FLAG_NONE,make_new, led_obj_make_new,print, led_obj_print,locals_dict, &led_locals_dict);
led.c中
#include "py/runtime.h"#include "py/mphal.h"#include "led.h"/// \moduleref pyb/// \class LED - LED object////// The LED object controls an individual LED (Light Emitting Diode).// the default is that LEDs are not inverted, and pin driven high turns them on#ifndef MICROPY_HW_LED_INVERTED#define MICROPY_HW_LED_INVERTED (0)#endiftypedef struct _pyb_led_obj_t {mp_obj_base_t base;mp_uint_t led_id;} pyb_led_obj_t;static const pyb_led_obj_t pyb_led_obj[] = {{{&pyb_led_type}, 1},{{&pyb_led_type}, 2},{{&pyb_led_type}, 3},{{&pyb_led_type}, 4},};#define NUM_LEDS MP_ARRAY_SIZE(pyb_led_obj)void led_init(void) {/* Turn off LEDs and initialize */for (int led = 0; led < NUM_LEDS; led++) {}}void led_state(pyb_led_t led, int state) {if (led < 1 || led > NUM_LEDS) {return;}mp_uint_t led_id = pyb_led_obj[led].led_id-1;if (state == 0) {// turn LED offmp_hal_pin_low(led_id);} else {// turn LED onmp_hal_pin_high(led_id);}}void led_toggle(pyb_led_t led) {if (led < 1 || led > NUM_LEDS) {return;}mp_uint_t led_id = pyb_led_obj[led].led_id-1;// toggle the output data register to toggle the LED statemp_hal_pin_toogle(led_id);}void led_set_intensity(pyb_led_t led, mp_int_t intensity) {// intensity not supported for this LED; just turn it on/offled_state(led, intensity > 0);}void led_debug(int n, int delay) {led_state(1, n & 1);led_state(2, n & 2);led_state(3, n & 4);led_state(4, n & 8);//mp_hal_delay_ms(delay);}/******************************************************************************//* MicroPython bindings */void led_obj_print(const mp_print_t *print, mp_obj_t self_in, mp_print_kind_t kind) {pyb_led_obj_t *self = MP_OBJ_TO_PTR(self_in);mp_printf(print, "LED(%u)", self->led_id);}/// \classmethod \constructor(id)/// Create an LED object associated with the given LED:////// - `id` is the LED number, 1-4.static mp_obj_t led_obj_make_new(const mp_obj_type_t *type, size_t n_args, size_t n_kw, const mp_obj_t *args) {// check argumentsmp_arg_check_num(n_args, n_kw, 1, 1, false);// get led numbermp_int_t led_id = mp_obj_get_int(args[0]);// check led numberif (!(1 <= led_id && led_id <= NUM_LEDS)) {mp_raise_msg_varg(&mp_type_ValueError, MP_ERROR_TEXT("LED(%d) doesn't exist"), led_id);}// return static led objectreturn MP_OBJ_FROM_PTR(&pyb_led_obj[led_id - 1]);}/// \method on()/// Turn the LED on.mp_obj_t led_obj_on(mp_obj_t self_in) {pyb_led_obj_t *self = MP_OBJ_TO_PTR(self_in);led_state(self->led_id, 1);return mp_const_none;}/// \method off()/// Turn the LED off.mp_obj_t led_obj_off(mp_obj_t self_in) {pyb_led_obj_t *self = MP_OBJ_TO_PTR(self_in);led_state(self->led_id, 0);return mp_const_none;}/// \method toggle()/// Toggle the LED between on and off.mp_obj_t led_obj_toggle(mp_obj_t self_in) {pyb_led_obj_t *self = MP_OBJ_TO_PTR(self_in);led_toggle(self->led_id);return mp_const_none;}static MP_DEFINE_CONST_FUN_OBJ_1(led_obj_on_obj, led_obj_on);static MP_DEFINE_CONST_FUN_OBJ_1(led_obj_off_obj, led_obj_off);static MP_DEFINE_CONST_FUN_OBJ_1(led_obj_toggle_obj, led_obj_toggle);static const mp_rom_map_elem_t led_locals_dict_table[] = {{ MP_ROM_QSTR(MP_QSTR_on), MP_ROM_PTR(&led_obj_on_obj) },{ MP_ROM_QSTR(MP_QSTR_off), MP_ROM_PTR(&led_obj_off_obj) },{ MP_ROM_QSTR(MP_QSTR_toggle), MP_ROM_PTR(&led_obj_toggle_obj) },};static MP_DEFINE_CONST_DICT(led_locals_dict, led_locals_dict_table);MP_DEFINE_CONST_OBJ_TYPE(pyb_led_type,MP_QSTR_LED,MP_TYPE_FLAG_NONE,make_new, led_obj_make_new,print, led_obj_print,locals_dict, &led_locals_dict);
Led.h中
#ifndef MICROPY_INCLUDED_XX_LED_H#define MICROPY_INCLUDED_XX_LED_Htypedef enum {PYB_LED_RED = 1,PYB_LED_GREEN = 2,PYB_LED_YELLOW = 3,PYB_LED_BLUE = 4,} pyb_led_t;void led_init(void);void led_state(pyb_led_t led, int state);void led_toggle(pyb_led_t led);void led_debug(int value, int delay);extern const mp_obj_type_t pyb_led_type;#endif
py_port\modpyb.c中,绑定led实例pyb_led_type到pyb模块
#include#include "py/runtime.h"#include "py/mphal.h"#include "shared/runtime/pyexec.h"#include "led.h"//#include "portmodules.h"//#include "modmachine.h"//#include "extmod/modmachine.h"//#include "extmod/modnetwork.h"//#include "extmod/vfs.h"//#include "extmod/modtime.h"MP_DECLARE_CONST_FUN_OBJ_KW(pyb_main_obj); // defined in main.c// Provide a no-op version of pyb.country for backwards compatibility on// boards that don't support networking.static mp_obj_t pyb_country(size_t n_args, const mp_obj_t *args) {(void)n_args;(void)args;return mp_const_none;}static MP_DEFINE_CONST_FUN_OBJ_VAR_BETWEEN(mod_network_country_obj, 0, 1, pyb_country);static const mp_rom_map_elem_t pyb_module_globals_table[] = {{ MP_ROM_QSTR(MP_QSTR___name__), MP_ROM_QSTR(MP_QSTR_pyb) },{ MP_ROM_QSTR(MP_QSTR_LED), MP_ROM_PTR(&pyb_led_type) },};static MP_DEFINE_CONST_DICT(pyb_module_globals, pyb_module_globals_table);const mp_obj_module_t pyb_module = {.base = { &mp_type_module },.globals = (mp_obj_dict_t *)&pyb_module_globals,};MP_REGISTER_MODULE(MP_QSTR_pyb, pyb_module);
py\genhdr\moduledefs.h中注册pyb模块
extern const struct _mp_obj_module_t pyb_module;#define PYB_BUILTIN_MODULE_CONSTANTS \{ MP_ROM_QSTR(MP_QSTR_pyb), MP_ROM_PTR(&pyb_module) },#define MICROPY_REGISTERED_MODULES \MODULE_DEF_BUILTINS \MODULE_DEF_CMATH \MODULE_DEF_GC \MODULE_DEF_MATH \MODULE_DEF_MICROPYTHON \MODULE_DEF_SYS \MODULE_DEF___MAIN__ \PYB_BUILTIN_MODULE_CONSTANTS// MICROPY_REGISTERED_MODULES
见视频
https://mp.weixin.qq.com/s/JdFb3x7KOag114Fb72URGA?token=1312261758&lang=zh_CN
import pyb
led1 = pyb.LED(1)
led2 = pyb.LED(2)
led1.on()
led2.on()
led1.off()
led2.off()
led1.toggle()
led2.toggle()
可以看到micropython新增模块支持比较简单,只需要按照模板注册模块,绑定对应的驱动即可。后续就可以不断添加新的模块支持使更具备实用性。
