



动图来源:www.parlezvoustech.com
1、常见的硬件通信协议?
UART (Universal Asynchronous Receiver Transmitter):
一种异步串行通信协议,不需要时钟信号,常用于简单的点对点通信。
SPI (Serial Peripheral Interface):
一种同步串行通信协议,通常用于微控制器与传感器、存储设备等外部设备之间的高速通信。
包含一个主设备和一个或多个从设备,通过时钟信号同步数据传输。
I2C (Inter-Integrated Circuit):
一种同步多主多从串行通信协议,常用于低速设备间的短距离通信。
使用两根信号线(SDA和SCL)进行数据传输和时钟同步。
RS-232:
一种早期的串行通信标准,通常用于计算机与外部设备(如调制解调器和打印机)之间的连接。
使用单端信号传输,支持较长的传输距离。
RS-485:
一种改进的串行通信标准,适用于多点通信系统,支持更长的传输距离和更高的数据速率。
使用差分信号传输,提高抗干扰能力。
PCI (Peripheral Component Interconnect ):
一种高速串行计算机扩展总线标准,广泛用于计算机内部的各种组件之间(如显卡、存储设备)的连接。
提供较高的数据传输速率和低延迟。
ATA/IDE (Advanced Technology Attachment/Integrated Drive Electronics):
一种早期的硬盘驱动器接口标准,使用并行数据传输方式。
SATA (Serial ATA):
ATA接口的串行版本,广泛用于连接硬盘驱动器和SSD,具有更高的数据传输速率。
Bluetooth:
一种短距离无线通信协议,常用于移动设备、计算机和外围设备之间的数据传输。
Wi-Fi (Wireless Fidelity):
一种常用的无线局域网(WLAN)技术,支持设备之间的无线数据传输。
Zigbee:
一种低功耗、低数据速率的无线通信协议,常用于物联网(IoT)设备之间的通信。
NFC (Near Field Communication):
一种短距离无线通信技术,常用于移动支付、访问控制等应用。
Modbus:
一种广泛应用于工业自动化系统的串行通信协议,支持主从通信模式。
CAN (Controller Area Network):
一种用于汽车和工业自动化中的串行通信协议,支持多主模式和高可靠性数据传输。
PROFINET:
一种基于以太网的工业通信协议,广泛应用于工业自动化和控制系统。
USB (Universal Serial Bus):
一种广泛应用于计算机和外部设备之间的通用串行通信协议,支持热插拔和即插即用。
HDMI (High-Definition Multimedia Interface):
一种数字视频和音频传输标准,广泛用于高清电视、显示器和其他多媒体设备。
Ethernet:
一种用于局域网(LAN)的有线通信标准,支持高速数据传输和多点通信。
2、同步通信和异步通信?
同步和异步通信是两种不同的数据传输方式,主要区别在于对时钟信号的使用。
特点:
共享时钟信号:发送端和接收端共享一个时钟信号,用于同步数据传输。
数据同步:每个数据位的传输都由时钟信号引导,接收端根据时钟信号确定数据读取时刻。
优点:
高效传输:由于时钟同步,数据传输速率较高。
可靠性强:时钟信号使数据的接收和发送更加精确。
缺点:
复杂性:需要额外的时钟线,电路设计复杂。
距离限制:时钟信号的准确性可能会随着距离增加而降低。
应用场景:
SPI、I2C(虽然I2C也支持异步特性,但其时钟线用于同步)。
特点:
无共享时钟:发送端和接收端不共享时钟信号,而是使用起始位和停止位来标识数据帧。
自包含时序:每个数据帧通过自身的起始和停止信号进行同步。
优点:
简单性:无需时钟线,减小了硬件复杂度。
灵活性:适合低速、长距离通信。
缺点:
效率稍低:由于需要添加起始和停止位,实际数据传输速率可能降低。
误差累积:长时间传输可能出现同步误差。
应用场景:
UART、RS-232。
同步通信适用于需要高效、高速数据传输的场景,但通常需要额外的硬件支持。
异步通信适合简单低速应用,易于实现和调试。
3、UART串口通信?
UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)是一种用于串行通信的硬件设备。UART用于将数据串行地传输和接收,广泛应用于计算机与外围设备之间的数据通信。
异步通信: 没有时钟信号,发送方和接收方必须约定好波特率(传输速率)。
波特率: 每秒传输的位数,一般有9600、115200等常见波特率。
数据帧结构: 包括开始位、数据位、奇偶校验位(可选)和停止位。

全双工: 可以同时进行发送和接收(两个独立的通道)。
半双工: 发送和接收不能同时进行。
单工: 只能单方向传输数据。
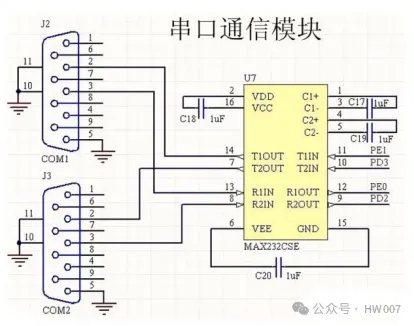
硬件实现: 通过MCU或专用的UART芯片(如MAX232)实现。
软件实现: 通过软件模拟UART通信,适用于不具备硬件UART模块的系统。
嵌入式系统: 如单片机与传感器、模块之间的通信。
计算机外设: 如与鼠标、键盘、调制解调器等的连接。
调试和编程: 通过串口调试嵌入式设备或下载程序。
4、IIC通信?
I²C(Inter-Integrated Circuit)是一种常用的串行通信协议,设计用于短距离互连低速设备。由飞利浦公司(现NXP)在20世纪80年代开发,I²C现在广泛应用于嵌入式系统中,用于连接微控制器、传感器、显示器和其他外围设备。
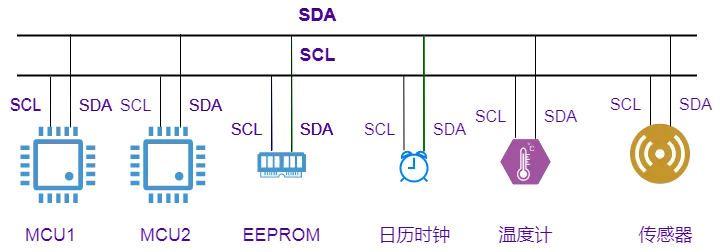
I²C是一种多主从架构的双线串行总线系统,由主设备和从设备组成。通信通过两条线进行:
SCL(Serial Clock Line): 时钟线,由主设备生成时钟信号。
SDA(Serial Data Line): 数据线,用于传输数据。
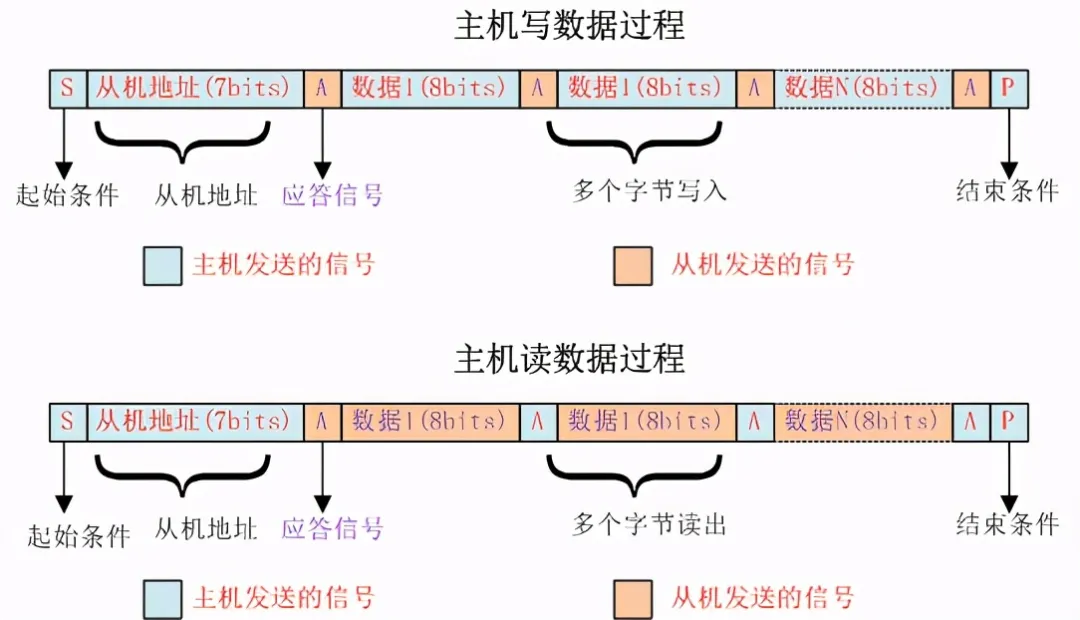
I²C使用7位或10位地址进行设备寻址,传输数据以字节为单位,具体传输步骤如下:
起始条件(Start condition):主设备拉低SDA线,然后拉低SCL线,表示通信的开始。
地址传输:主设备发送从设备的地址,并指示读/写操作。
数据传输:主从设备之间的数据传输。每个字节后面都有一个确认位(ACK/NACK)。
停止条件(Stop condition):主设备拉高SCL线,然后拉高SDA线,表示通信的结束。
每个I²C从设备都有唯一的7位或10位地址。7位地址通常使用更广泛,实际传输时,地址会左移一位,最右边一位表示读/写操作(0表示写,1表示读)。
开始条件(Start Condition): 主设备将SDA从高电平拉到低电平,同时SCL保持高电平。
停止条件(Stop Condition): SCL为高电平时,SDA从低电平拉到高电平。
字节数据传输: 每传输一个字节数据后,接收方需发送一个确认位(ACK)。
读/写操作: 主设备发送设备地址的同时紧接着一个读/写位,0表示写,1表示读。
简单的硬件接口:只需两根线即可实现通信。
多主从架构:允许多个主设备和从设备共用一条总线。
灵活性:支持多种设备共同使用,且设备可以热插拔。
速率较低:标准模式下最大速率为100kHz,快速模式为400kHz,更高的速率(高达5MHz)需要特殊的高速度模式。
距离受限:通常适用于PCB内部或短距离通信。
总线竞争:总线空闲时,多个主设备可能会尝试同时启动通信。
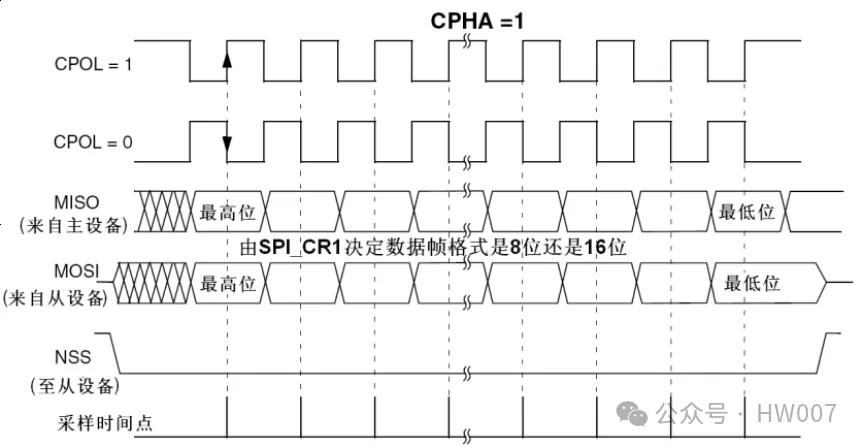
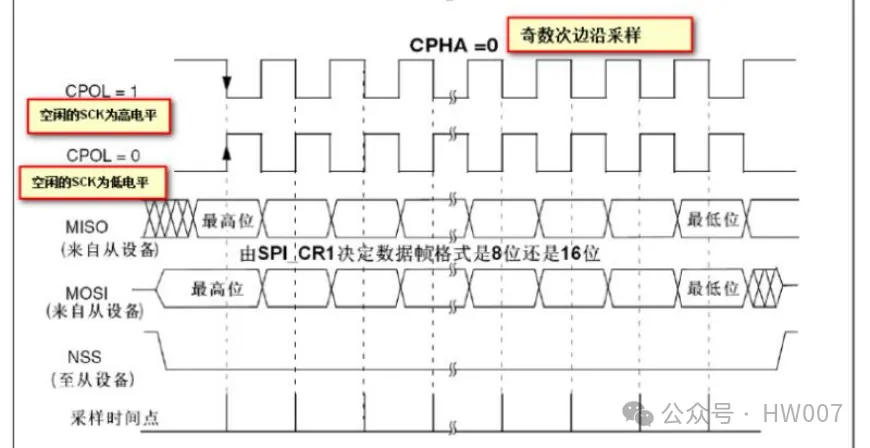
5、SPI通信?
6、RS-232外部通信?
RS-232(Recommended Standard 232)是一种串行通信标准,最初由EIA(Electronic Industries Association)在20世纪60年代制定。它广泛用于计算机与外围设备(如调制解调器、打印机和工业设备)之间的通信。尽管RS-232在现代消费电子产品中使用较少,但在工业自动化和某些专业设备中仍然非常重要。
RS-232为异步串行、全双工通信,由电子工业协会(EIA)制定,是个人计算机上的通讯接口之一,通常以9个引脚(DB-9)出现,传输距离通常十几米。
RS-232接口定义了多种信号线,其中最常用的是:
TXD(Transmit Data): 发送数据线。
RXD(Receive Data): 接收数据线。
GND(Ground): 地线。
RTS(Request to Send): 请求发送。
CTS(Clear to Send): 清除发送。
DTR(Data Terminal Ready): 数据终端准备好。
DSR(Data Set Ready): 数据集准备好。
DCD(Data Carrier Detect): 数据载波检测。
RI(Ring Indicator): 振铃指示。
RS-232定义的信号电压如下(负逻辑):
逻辑1(标志位): -3V到-15V。
逻辑0(空闲位): +3V到+15V。
任何在-3V到+3V之间的电平都被视为不确定状态。
RS-232使用异步通信,没有时钟信号。数据传输通过开始位、数据位、可选的校验位和停止位构成的数据帧进行:
起始位: 通常为1位,表示数据传输的开始,逻辑低电平。
数据位: 通常为5到8位,是实际传输的数据。
校验位: 可选,用于错误检测,一般有奇校验和偶校验。
停止位: 通常为1或2位,表示一帧数据的结束,逻辑高电平。
RS-232的波特率(传输速率)可以从300bps到115200bps不等,典型值有9600、19200、38400、57600和115200bps。
RS-232广泛应用于:
计算机与调制解调器: 老式拨号上网。
工业自动化设备: PLC、传感器和控制器之间的通信。
嵌入式系统: 用于调试和通信。
医疗设备: 如数据采集和监控设备。
7、RS485通信
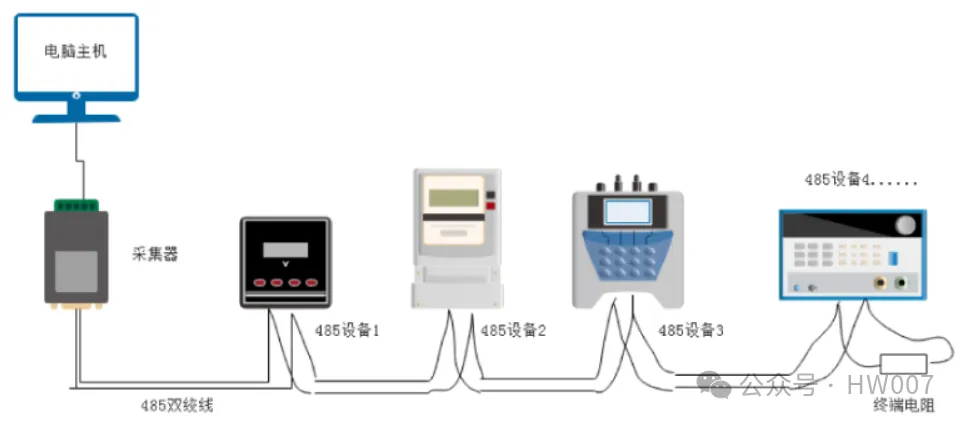
RS-485是一种用于多点、差分信号传输的串行通信标准,广泛应用于工业自动化、楼宇自动化和其他需要可靠长距离数据传输的应用中。与RS-232相比,RS-485具有更强的抗干扰能力和更长的传输距离。
RS-485使用差分信号传输,它通过两根线(A和B)来传输数据。差分信号的优势在于:
抗干扰能力强:由于接收端检测的是两根线之间的电压差,而不是单端电压,所以对噪声有更好的抵抗力。
传输距离长:典型的传输距离可以超过1200米。
RS-485支持多点通信,即多个设备可以连接在同一总线上,常见的配置是主从模式。一个RS-485总线上可以连接多达32个设备,使用扩展器可以连接更多设备。
逻辑1:A线电压低于B线电压,通常两线间的电压差为+(2~6)V。
逻辑0:A线电压高于B线电压,通常两线间的电压差为-(2~6)V。
对于驱动器(发送器),逻辑1(正)是A>B, AB之间电压为+2~+6V,而逻辑0(负)是A
而对于接收器,则逻辑1(正)则是B>A,BA之间的电压不小于200mV,逻辑0则是A>B,BA之间的电压小于-200mv,即正负逻辑,电压绝对值都大于200mv。
数据只能在一个方向传输,必须通过协议或硬件控制来实现发送和接收的切换。
常见连接:两根差分线(A和B),一根地线(GND)。
数据可以同时在两个方向传输,需要四根线(两对差分线)。
常见连接:四根差分线(A、B、Y、Z),一根地线(GND)。
RS-485广泛应用于需要长距离、可靠传输的场景,如:
工业自动化:PLC、传感器、执行器之间的通信。
楼宇自动化:HVAC系统、门禁控制、照明控制。
串行设备互连:例如Modbus协议下的设备通信。
远程数据采集:如SCADA系统中的数据采集。
8、Modbus协议
9、CAN总线

