

让AI比真人更会开车
”
作者 | 秦章勇
人类开车,百公里可能消耗一个馒头,但如果让车辆自动驾驶开100公里,复杂的算法就需要消耗大量的能量和算力。
两者为什么差异如此之大?
按照能量守恒定律,人类开车要远比自动驾驶更“省钱、省力”,一直号称比人类驾驶更安全的的自动驾驶,究竟怎么才能做到真正的类人驾驶?
最近奔驰中国智驾负责人王忻 ,就和诺贝尔生理学或医学奖得主梅·布里特-莫泽(May-Britt Moser)进行了一次深入对谈。莫泽教授因发现了大脑里的网格细胞而荣获诺贝尔奖,网格细胞相当于大脑中的定位系统,可以为你在空间环境中提供方向感知。
这和目前火热的自动驾驶概念不谋而合,所谓智能驾驶,就是从A点到B点,人类具备这种识路辨路的能力,智能汽车如果具备“认路细胞”,似乎也可以具备人类的能力,但受限于传感器和算力,目前智能驾驶尚未达到人类的驾驶水平。
好消息是,不少企业开始在发力“端到端”大模型技术,试图从底层逻辑再造一个“人脑”驾驶。前不久,梅赛德斯-奔驰的端到端“无图” L2++ 全场景高阶智能驾驶,刚刚完成了首秀,这也让奔驰成为首家采用端到端技术的国际豪华车企。
奔驰L2++似乎具备了“人脑”的要素,比如不依赖激光雷达采用纯视觉方案 、不需要高精地图、强悍的云端算力、更强的泛化能力...
一边是多年专注智能驾驶领域的研发专家,一边是探索人脑定位系统的诺贝尔科学家,两者碰撞注定会有行业火花。
01
自动驾驶要向人学习什么?
回答文章开篇提出的问题,先了解人和机器开车的基本逻辑。
人类开车,需要眼睛、手、脚以及大脑等协同工作。如果你刚开始学,就得有更多专注力,比如你会把座位尽可能调到靠前,这时候视觉、听觉甚至还有触觉都在给你加油,新手司机一顿操作下来,额头手心止不住冒汗,心脏也跟着扑通直跳。
老司机当然会更从容,加速、超车等行云流水,甚至只凭借肌肉记忆就能完成这些操作。
更深层次来说,无论是新手还是老司机,开车的过程都是大脑给予的电信号,Moser教授解释称,在开车时,大脑中有特定的细胞帮助定位方向,比如“头方向细胞”告诉我们当前的行驶方向,“边界细胞”告诉我们周围的边界。
最重要的是,凭借这些细胞,能让我们具有“空间感知能力”。Moser教授曾做过一个实验,把小白鼠放到一个虚拟环境中,重复完成同一个寻路任务,最终小白鼠完成了进化,自己找到了一个最短的途径,通过研究发现,帮助小白鼠完成矢量导航的就是网格细胞。
网格细胞就像一个坐标系,能把整个空间环境分成蜂窝状的六边形网格,指导着我们选择方向。除了提供方向感知,也有研究者提出,网格细胞也会参与矢量计算,帮助人类规划路径。
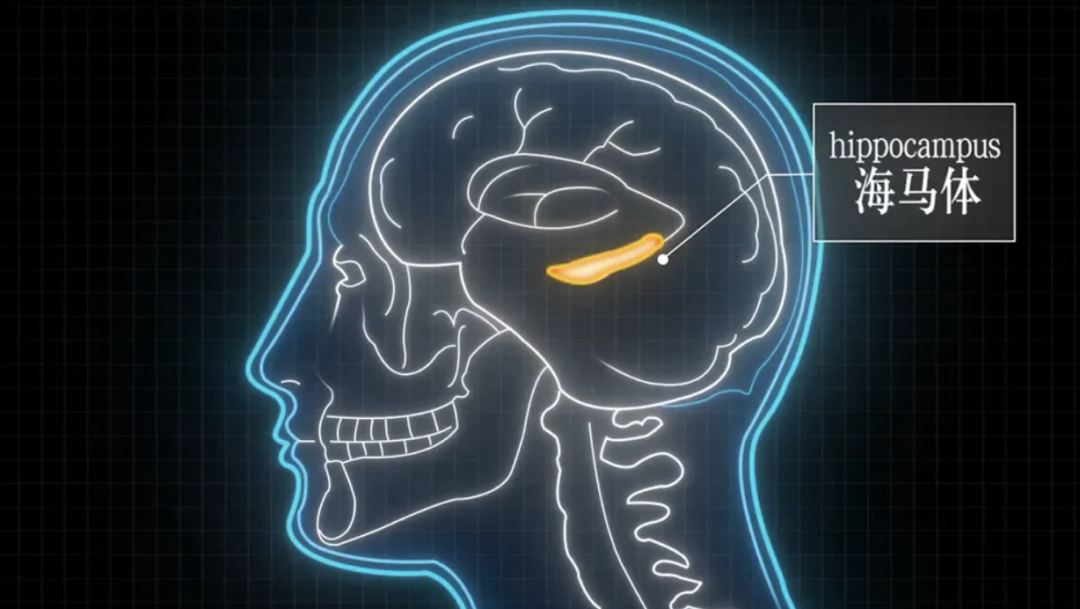
这些细胞基本在大脑海马区及其周围,正是这个负责短时记忆、存储转换以及定向等功能的神奇区域,帮助我们完成了开车认路。
所以人开车,只要大脑是清醒的,就能通过视觉记住位置后,在大脑形成一种想象中的边界,并随时更新这个想象中的地图。这个过程当然不会消耗太多能量,大脑的能耗只相当于一个20瓦的灯泡,有时候吃一顿饱饭,就能开上一整天。
汽车就不一样了,一辆机器想要实现自动驾驶,需要依靠太多传感器,像前摄像头、后摄像头、毫米波雷达甚至得用上激光雷达等。
处理这些传感器的数据,需要借助大量的算力,这种复杂的算法也需要能源供给。即便是一个简单的避障动作,都需要运算大量的数据。
以ChatGPT为例,其每天要响应大约2亿个请求,在此过程中消耗超过50万度电力,也就是说,ChatGPT每天用电量相当于1.7万个美国家庭的用电量,这个能耗相当惊人。
从汽车自动驾驶的发展历史来看,也经历了很多种阶段,前两年主要是靠手写规则,比如具体场景实行具体指令,但这个工作量堪称巨大,因为总会有应付不完的场景和写不完的代码。
怎么才能让汽车像人类一样,用一个通用的范式去解决各种路况?
王忻在访谈中表示,梅赛德斯-奔驰采用最新的端到端大模型技术。

顾名思义,端到端是指通过一个AI模型,输一个原始数据,就能输出最终结果,这种方式依赖深度学习模型,特别是神经网络,可以自动从数据中学习到复杂特征。其结果就是类似于人脑的决策逻辑,学习数据从少到多的过程,就是新手变身老司机的过程。
到2025年,将随梅赛德斯-奔驰模块化(MMA)平台推出“无图”L2++全场景高阶智驾系统,该系统应用端到端大模型技术,不依赖高精地图,可实现点到点的高阶智驾体验。
02
自动驾驶领域资深玩家
让AI比真人更会开车
端到端到今年已经成为行业内最热门的智驾技术路线,在这场比拼中,小鹏、华为、理想以及蔚来等选手在端到端领域的研究竞赛,已经从一年前的开城速度,到如今的OTA更新频率。
而端到端的投入非常大,最稀缺的就是人才,作为新兴的技术领域,一个技术大牛甚至赶得上一个研发团队。同时端到端对数据和算力的需求也提升到了巨大量级,理想汽车就曾在内部估算,每年投入到训练上的费用就达到10亿人民币,未来甚至会涨到10亿美元,这还不包括人员和其他成本。
不成比例的投入产出比,研究端到端显然不是一笔划算的买卖。
但奔驰显然不会这么想。
过去5年,奔驰在华累积研发投入总计达105亿人民币,一年的时间完成国内的自研L2+高速导航辅助功能落地。
如今研发端到端,在整个合资品牌中也是为数不多的激进者。
奔驰的L2++是不依赖高精地图,基于中国的数据训练,投喂了大量国内老司机驾驶的素材,所以能适应中国路况的博弈逻辑。而且只要有导航,哪儿都能开,有导航规划的路段均可启用L2++。

从王忻和Moser的实际体验来看,奔驰的这套L2++,在应对无保护路口左转、无保护路口右转、右转主动避让行人等场景时可以做到拟人化驾驶。
如果遇到其他道路参与者,比如行人或公交车,也会提前避让,同时会提醒司机提高注意力。
除此之外,L2++还可以完成路口无保护掉头以及环岛等场景,整个功能体验已经达到了第一梯队。
奔驰L2++也可以实现“车位到车位”,也就是从出发车位泊出、途经城区/高速/城区、到目的地车位泊入,车辆自主处理全场景的路况问题,这可以说是目前端到端玩家能达到的最高水平。
而且不只是纯电车型,奔驰对燃油车型也会一视同仁,明年会通过OTA实现L2+智能驾驶辅助系统的自动上下匝道功能。针对未来产品,包括燃油车型,奔驰也会逐步搭载高阶智驾系统。
这意味着未来有“端味儿”的产品,再也不局限于新能源车了。
03
百年奔驰的自我更迭
传统语境下,新势力品牌对智能化有着更大的话语权,但作为百年豪华品牌,奔驰对于智能化的探索早就已经开始,甚至是亲历了智能座舱、智能驾驶的从无到有。
1978年,奔驰推出了世界上第一辆拥有防抱死制动系统(ABS)的汽车。
1986年,奔驰通过“普罗米修斯”计划,开启了对自动驾驶的探索。
到了2018年,奔驰又发布第一代MBUX座舱交互系统。
奔驰还是全球首个获得L3级有条件自动驾驶国际认证,并在欧美量产的车企。去年年底,奔驰成为首批在北京获批开展L3级有条件自动驾驶系统测试的车企之一。
时至今日,奔驰对于智能化的投入仍在不断加大,并自主研发了MB.OS全新域控制架构。
这套智能架构相当于“中枢神经”,覆盖智驾、智舱、车身舒适和通信模块的全部底层逻辑。

和传统分布式EEA架构不同,MB.OS架构采用域控架构,可以实现软、硬件解耦,分别由4大功能域和1个通信模块组成。功能域则分为智能座舱域、 自动驾驶域、车身控制域、行车与充电域等,各个域之间车载以太网通信速度提高到了10Gbps。
一套组合拳下来,让MB.OS彻底打破了平台和动力形式限制,可以实现整车OTA,让每一辆奔驰都能实现“软件定义汽车”。
基于MB.OS,除了“无图” L2++ 全场景高阶智驾,还有就是下一代车机系统——有着全新的语音交互和全新UI设计和导航系统。
其语音交互系统基于生成式 AI、2-3 倍数据训练提升的大语言模型打造,具备3D图形渲染技术,奔驰将单纯的“语音助手”定位升级为“奔驰虚拟助理”,这个虚拟助理除了体现数字豪华,还能为用户提供情绪价值。
这一切技术距离我们并不远,MB.OS将于2025年随MMA平台车型推出,届时我们也会真实感受到,这个百年品牌如何用数字智能去定义豪华。
和中国新兴汽车品牌相比,奔驰对智能驾驶的追求或许不是最快的,但一定是最稳的。从早期初步探索,到如今厚积薄发,百年奔驰仍在引领着汽车行业的创新。

看到这里说明您已用心读完本篇文章,有任何想法欢迎在评论区留言。另外,因微信改版,需要设置星标才能及时看到推送,请关注并点击星标“超电实验室”,我们一起研究车圈大小事~

推荐阅读



