
----追光逐电 光赢未来----
摘要
主要贡献

内容概述
相机标定组件
相机模型

标定板


标定算法
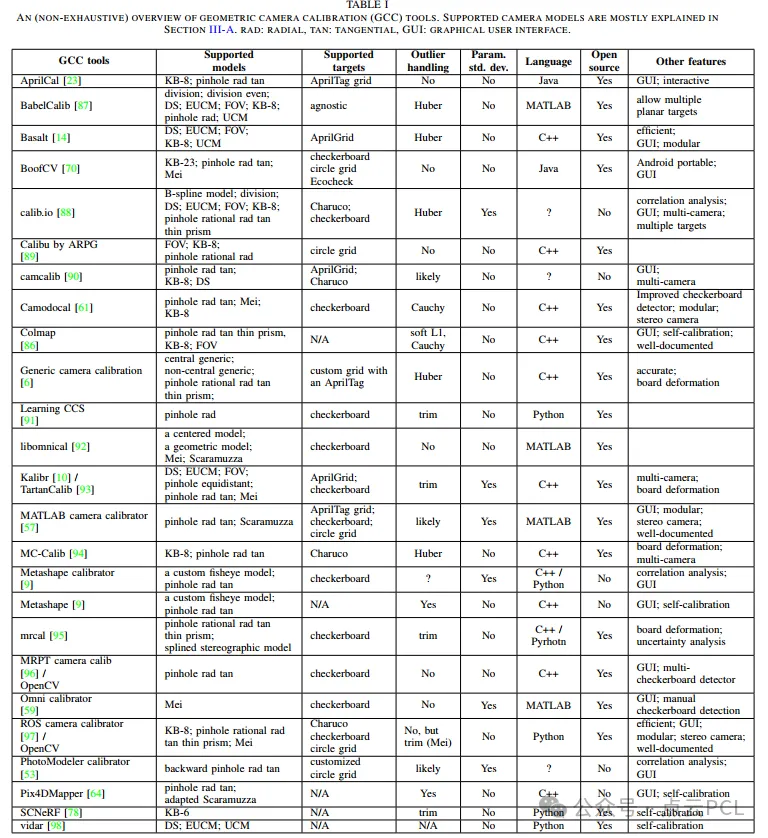
标定工具
总结
文章:A Review and Comparative Study of Close-Range Geometric Camera Calibration Tools
作者:Jianzhu Huai, Yuan Zhuang†, Yuxin Shao, Grzegorz Jozkow, Binliang Wang, Junhui Liu, Yijia He, and Alper Yilmaz

申明:感谢原创作者的辛勤付出。本号转载的文章均会在文中注明,若遇到版权问题请联系我们处理。

----与智者为伍 为创新赋能----

联系邮箱:uestcwxd@126.com
QQ:493826566


