

点击蓝字 关注我们
SUBSCRIBE to US
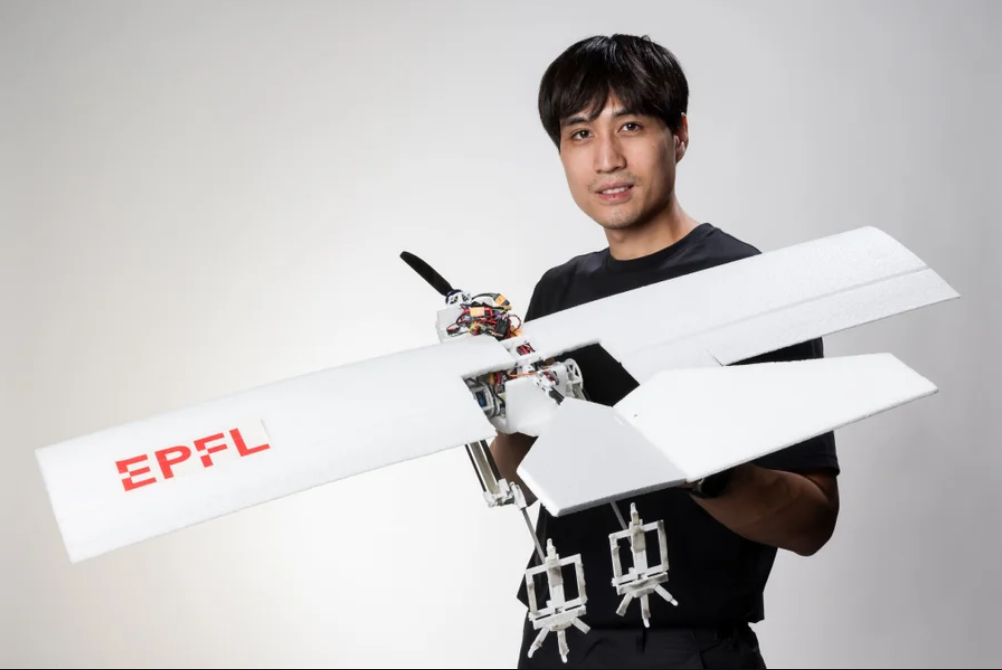
Won Dong Shin
在瑞士日内瓦湖湖畔,洛桑联邦理工学院(École Polytechnique Fédérale de Lausanne)汇聚了众多机器人专家。这里也是众多鸟类的栖息地,它们大部分时间都在做鸟类该做的事。除了少数情况外,那些鸟事实际上并不打算飞行:飞行是一项非常耗费体力的活动,许多鸟类已经发现,它们可以只在地面上行走(食物往往都在地面上),而不必一次次地起飞,这样就不会把自己累坏。
“每当我在EPFL校园里遇到乌鸦时,我都会观察它们是如何行走、跳过或跳上障碍物,以及如何起跳的,”EPFL智能系统实验室的博士生Won Dong Shin说道,“我观察到,它们总是通过跳跃来起飞,即使在它们本可以仅靠翅膀起飞的情况下也是如此。”

Alain Herzog
Won Dong Shin是近日发表在《自然》杂志上的一篇论文的第一作者,该论文探究了鸟类为何要跳跃起飞,以及这一现象如何能有益地应用于固定翼无人机(这种无人机原本需要跑道或弹射器等设备才能起飞)。Won Dong Shin的“RAVEN”(受鸟类启发的多环境机器人飞行器,Robotic Avian - inspired Vehicle for multiple ENvironments)无人机有着受鸟类启发而设计的腿,可以像乌鸦那样跳跃起飞,并且也能利用这些腿在地面上很好地移动(https://spectrum.ieee.org/tag/drones)。
早在2019年,我们(作者,以下简称我)就报道过一家南非初创公司Passerine,它也有类似的想法,尽管它更专注于利用腿部将固定翼货运无人机发射到空中(https://spectrum.ieee.org/delivery-drones-use-birdinspired-legs-to-jump-into-the-air)。这对无人机来说是一项吸引人的能力,因为这意味着你可以利用固定翼带来的航程和续航能力,而不必采用低效的手段,比如给自己加装一堆额外的螺旋桨来起飞。“将跳跃起飞融入固定翼飞行器的概念是RAVEN和Passerine共有的想法,”Shin说,“关键的区别在于它们的关注点:Passerine专注于一种仅用于跳跃的机制,而RAVEN则专注于多功能腿。
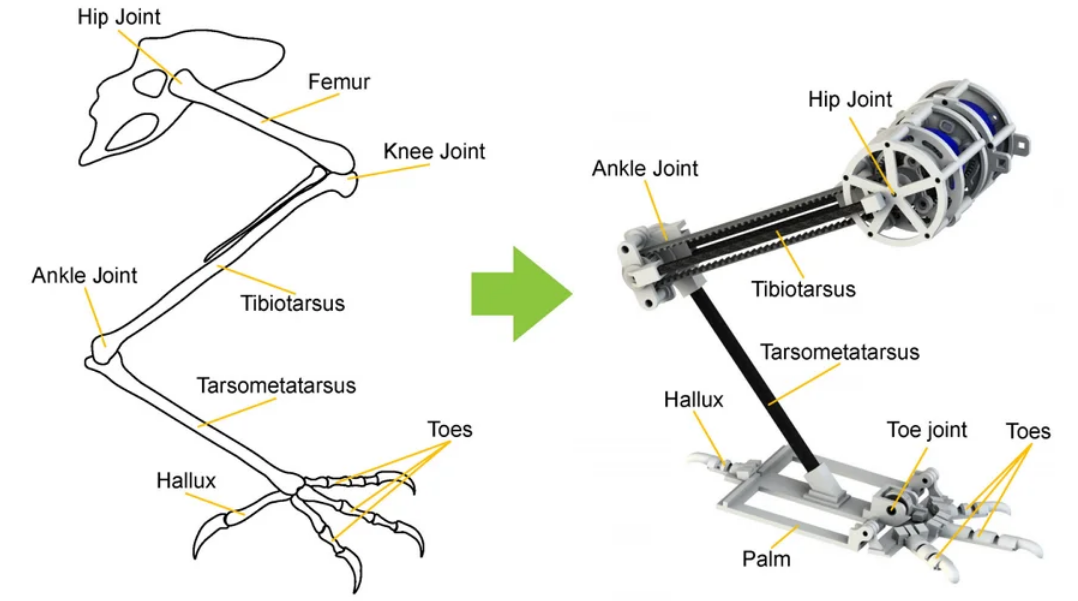
无人机的仿生设计
多功能腿使“RAVEN”(受鸟类启发的多环境机器人飞行器)更接近鸟类,尽管这些机械腿远不及真正的鸟腿那样复杂和功能强大,但采用一些生物学设计的关键原理(比如像肌腱一样的弹簧中储存和释放能量的能力以及一些灵活的脚趾)使得“RAVEN”能够以非常像鸟的方式四处活动。
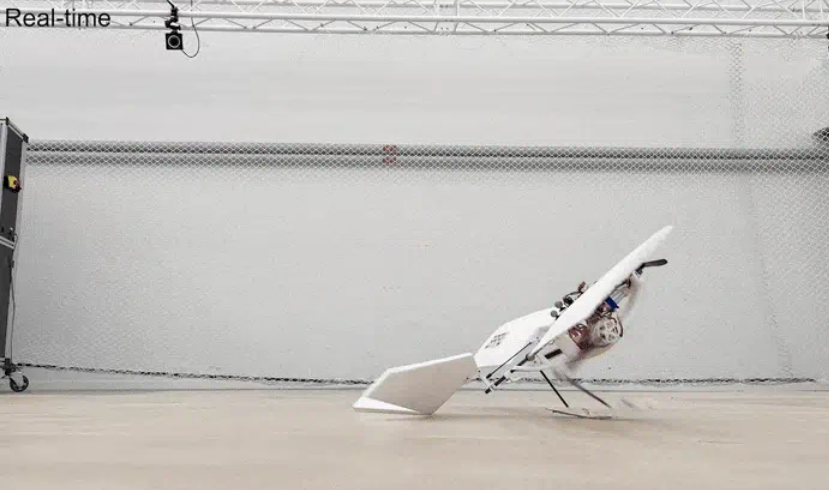
改飞行器名为“RAVEN”,它的大小近似于一只乌鸦,翼展为100厘米,体长50厘米。它能在不到4秒的时间内行走1米,跳过12厘米宽的间隙,并跳上26厘米高的障碍物顶部。在跳跃起飞时,“RAVEN”的腿能将无人机推至近半米的起始高度,向前速度为2.2米/秒。
“RAVEN”的脚趾特别有趣,尤其是在你看到没有脚趾时这个可怜的机器人会摔得多惨之后—— “设置一个被动弹性脚趾关节很重要,这能实现多种步态模式,并确保‘RAVEN’能以正确的角度起跳,”Shin解释道。大多数双足机器人的脚部是可驱动的,能直接控制脚部角度,但对于一个会飞行的机器人来说,你不能随意到处添加驱动器,因为它们太重了。实际上,“RAVEN”是一架重620克的无人机,其中足足230克都是由脚部、脚趾、驱动器等部件构成的。
EPFL
为何要给无人机添加腿?
那么问题来了,添加腿部带来的所有这些额外重量和复杂性真的值得吗?从某种意义上说,绝对是值得的,因为这个机器人能做它以前做不了的事情——在地面上行走以及自行从地面起飞。但结果是,“RAVEN”足够轻,并且有足够强劲的电机,只要它以合适的角度支撑起来,它完全可以不通过跳跃就从地面起飞。换句话说,如果用几根冰棒棍来代替腿部,只是为了让无人机的机头向上倾斜,这对地面起飞来说是否同样有效呢?
研究人员对这一点进行了测试,发现不跳跃起飞的效果很糟糕。大迎角和低起飞速度相结合会导致飞行非常不稳定——虽然能飞起来,但很勉强。另一方面,总体而言,跳跃起飞的能量效率比静止起飞要高出大约十倍。正如论文总结的那样:“尽管跳跃起飞需要略高的能量输入,但它是将驱动能量转化为飞行所需的动能和势能时最节能且最快的方法。”而且就像鸟类一样,相对于进行多次短途飞行,“RAVEN”也能利用它的腿以一种更节能的方式在地面上移动。
Alain Herzog
这种设计能否应用于更大的固定翼无人机?
当然,鸟类除了行走、单脚跳和跳跃之外,还会用腿做各种各样的事情,Won Dong Shin希望“RAVEN”也能利用它的腿做更多的事情。显而易见的一个用途是用腿降落:“鸟类用腿来减速并减少冲击力,同样的原理也可以应用于‘RAVEN’的腿上,”Won Dong Shin说,不过这种无人机将需要一个目前还不具备的感知系统来进行规划。此外还有游泳、栖息和捕捉,所有这些都需要一种新的脚部设计。
我们还询问了Shin,要将这种设计放大(也许在某个时候能够携带有用的有效载荷)需要做些什么。他指出,超过一定尺寸后,鸟类就无法进行跳跃起飞了,它们要么得从更高的地方跳下,要么得给自己找一条跑道。
Shin指出,通常工程系统比生物系统更容易按比例扩大,而且他似乎很乐观地认为,用于跳跃起飞的腿部装置在可用于送货的更大固定翼无人机上是可行的。一个可用于避障和降落的视觉系统正在研发中,能够折叠以便无人机穿过狭窄缝隙的机翼也在研发之中。最后,Won Dong Shin表示他想让这架无人机尽可能像鸟一样:“我还热衷于将扑翼装置融入‘RAVEN’中。这种改进将实现更像鸟的运动,并带来更多有趣的研究课题以供探索。”
EPFL和UC Irvine的Won Dong Shin、Hoang - Vu Phan、Monica A. Daley、Auke J. Ijspeert、和Dario Floreano撰写的名为“Fast ground-to-air transition with avian-inspired multifunctional legs”的文章发表于12月4日出版的《自然》杂志上(https://www.nature.com/articles/s41586-024-08228-9)。

微信号|IEEE电气电子工程师学会
新浪微博|IEEE中国
· IEEE电气电子工程师学会 ·
往
期
推
荐
生成式人工智能带来的电子废弃物垃圾不容忽视
人工智能规模庞大 但有些人想让它变小
电动汽车的未来发展
半导体和网络安全:保护数字世界的核心
