在第二十届智能车竞赛中,有一个双车跟随组别。这个组别最初设定是希望车模能够通过 视觉、听觉,完成前后车模编队行进。为了避免前后车模没有跟随运行,最初是限定前后车模之间需要通过一个软绳连接限定,后来通过讨论 ,是通过限定跟随后车摄像头高度来要求后车能够跟随前车运行。最初定义后车摄像头镜头中心的高度距离地面小于 15厘米。不过后来通过实验,发现,如果使用广角镜头,这个高度依然能够使得后车独自完成赛道运行。所以,需要将双车运行规则进行修改。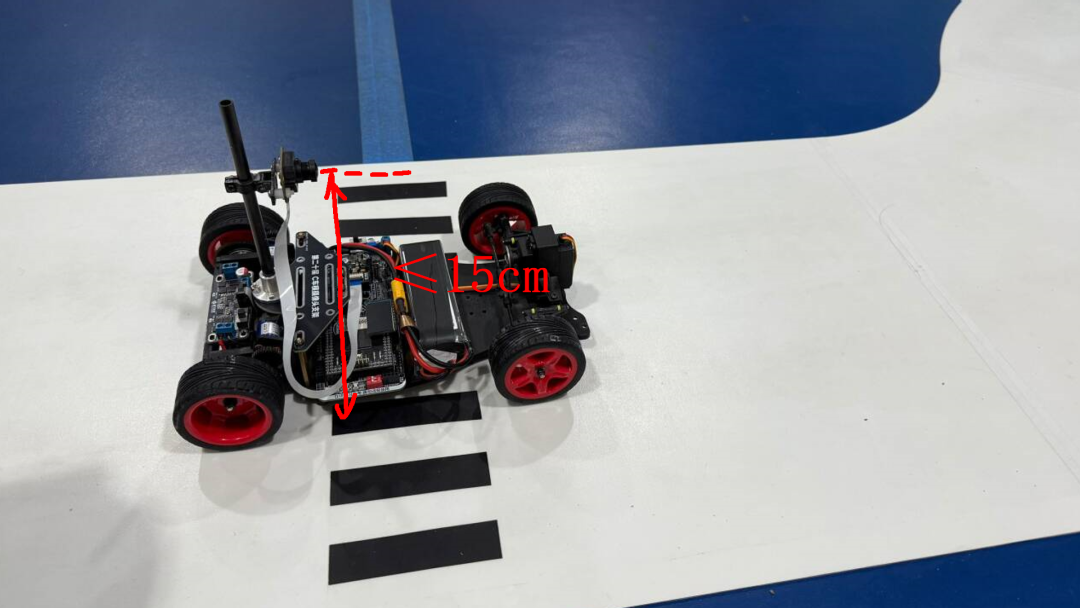

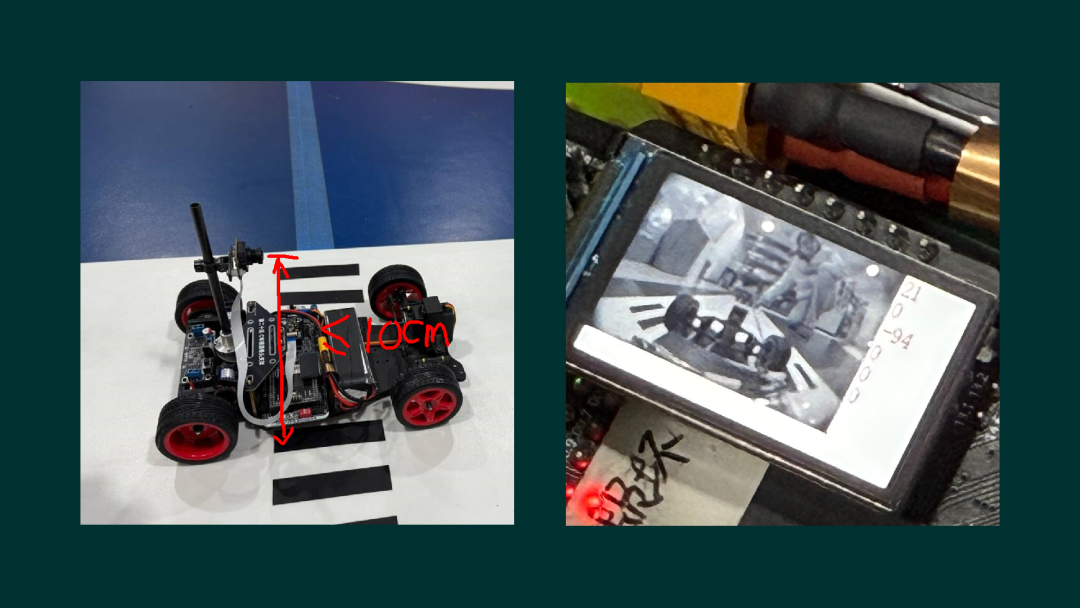
在规则中,限定跟随车辆上的摄像头距离地面的高度小于10厘米。 在这个高度下,无论是车模前轮对前方图像的遮挡,还是前车对赛道的遮挡,都使得后车必须通过前车引导才能够完成比赛。由此,便可以保证双车通过协同完成编队运行。
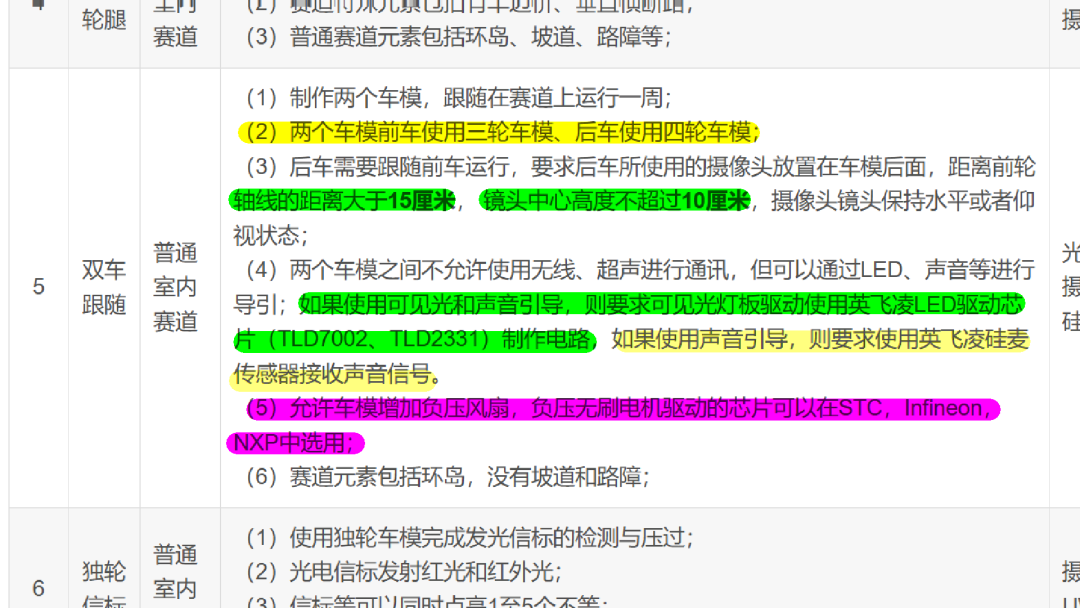
除了对于镜头高度的限定,根据同学们的反馈意见,双车组规则也进行了其它的调整。一是限定两个车模中,前车必须使用三轮车模,后车必须使用四轮车模。这是为了避免去年光电组的车模被用于今年的比赛。刚才提到,对于后车摄像头的高度限制在10厘米之内。对于前车,如果使用可见光LED作为标识物,需要使用 英飞凌的 LED驱动芯片。如果使用声音反馈给前车信息,则声音传感器需要使用英飞凌的硅麦。英飞凌免费提供LED驱动芯片和硅麦传感器。两个车模允许使用负压风扇,风扇的驱动电路板中的MCU种类,可以使用STC,英飞凌以及恩智浦单片机。
本文给出了对于第二十届全国大学生智能汽车竞赛中双车跟随组组别规则修改的说明。除此之外,组委会也对缩微组别中的起跑线进行了补充说明。关于轮腿组别中交错单边桥的间距进行了描述。欢迎大家即使关注比赛规则的修订,并提出合理的修改建议。

第二十届全国大学生智能汽车竞速比赛规则: https://zhuoqing.blog.csdn.net/article/details/143673441
