

环境搭建
环境变量配置
为了提高一些编译的速度,选择了在 Linux 系统下进行开发,在 Linux 上开发 N947 需要先安装 env 工具 https://github.com/RT-Thread/env ,按照说明文档进行安装即可,然后配置一些环境变量如下
其中 /opt/arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-eabi/bin 是自己的编译工具链的路径,/home/book/rt-thread 是 RT-Thread 根目录的路径
source ~/.env/env.sh export RTT_CC=gcc export RTT_ROOT=/home/book/rt-thread export RTT_DIR=/home/book/rt-thread export RTT_EXEC_PATH=/opt/arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-eabi/bin export PATH=$PATH:$RTT_EXEC_PATH如果需要将 N947 的例程从 rt-thread 的根文件夹中独立出来的话,需要删除工程中 Kconfig 文件的这行代码

代码高亮
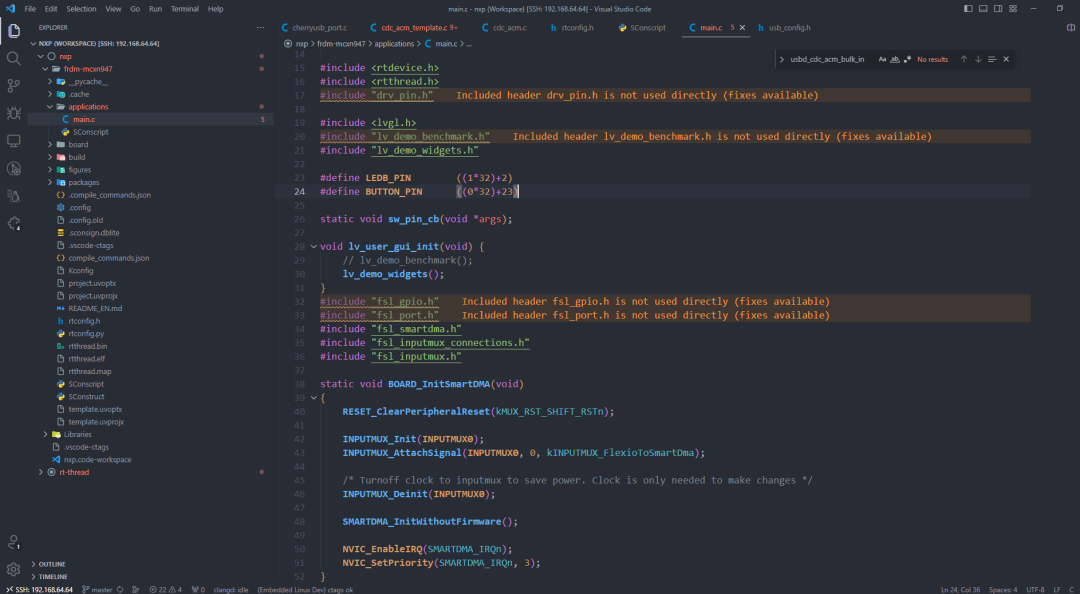
这里使用 VSCode 中的 Clang 插件,代码高亮和补全可以通过使用编译时候生成的 compile_commands.json 文件来实现,而 RT-Thread 的工程是采用的 scons 工具,所以可以使用 scons_compiledb 这个 python 包来生成 compile_commands.json 实现代码高亮,修改过的 SConstruct 文件如下
import osimport sysimport rtconfigimport scons_compiledbif os.getenv('RTT_ROOT'): RTT_ROOT = os.getenv('RTT_ROOT')else: RTT_ROOT = os.path.normpath(os.getcwd() + '/../../../../..')sys.path = sys.path + [os.path.join(RTT_ROOT, 'tools')]try: from building import *except: print('Cannot found RT-Thread root directory, please check RTT_ROOT') print(RTT_ROOT) exit(-1)TARGET = 'rtthread.' + rtconfig.TARGET_EXTif rtconfig.PLATFORM == 'armcc': env = Environment(tools = ['mingw'], AS = rtconfig.AS, ASFLAGS = rtconfig.AFLAGS, CC = rtconfig.CC, CFLAGS = rtconfig.CFLAGS, CXX = rtconfig.CXX, CXXFLAGS = rtconfig.CXXFLAGS, AR = rtconfig.AR, ARFLAGS = '-rc', LINK = rtconfig.LINK, LINKFLAGS = rtconfig.LFLAGS, # overwrite cflags, because cflags has '--C99' CXXCOM = '$CXX -o $TARGET --cpp -c $CXXFLAGS $_CCCOMCOM $SOURCES')else: env = Environment(tools = ['mingw'], AS = rtconfig.AS, ASFLAGS = rtconfig.AFLAGS, CC = rtconfig.CC, CFLAGS = rtconfig.CFLAGS, CXX = rtconfig.CXX, CXXFLAGS = rtconfig.CXXFLAGS, AR = rtconfig.AR, ARFLAGS = '-rc', LINK = rtconfig.LINK, LINKFLAGS = rtconfig.LFLAGS, CXXCOM = '$CXX -o $TARGET -c $CXXFLAGS $_CCCOMCOM $SOURCES')env.PrependENVPath('PATH', rtconfig.EXEC_PATH)scons_compiledb.enable(env)env.CompileDb()if rtconfig.PLATFORM in ['iccarm']: env.Replace(CCCOM = ['$CC $CFLAGS $CPPFLAGS $_CPPDEFFLAGS $_CPPINCFLAGS -o $TARGET $SOURCES']) env.Replace(ARFLAGS = ['']) env.Replace(LINKCOM = env["LINKCOM"] + ' --map rtthread.map')Export('RTT_ROOT')Export('rtconfig')SDK_ROOT = os.path.abspath('./')if os.path.exists(SDK_ROOT + '/Libraries'): libraries_path_prefix = SDK_ROOT + '/Libraries'else: libraries_path_prefix = os.path.dirname(SDK_ROOT) + '/Libraries'SDK_LIB = libraries_path_prefixExport('SDK_LIB')# prepare building environmentobjs = PrepareBuilding(env, RTT_ROOT, has_libcpu=False)objs.extend(SConscript(os.path.join(libraries_path_prefix, 'drivers', 'SConscript')))# include cmsisobjs.extend(SConscript(os.path.join(libraries_path_prefix, rtconfig.BSP_LIBRARY_TYPE, 'SConscript')))# make a buildingDoBuilding(TARGET, objs)最终搭建完成的效果如下所示,代码高亮十分方便查看代码
LVGL 适配
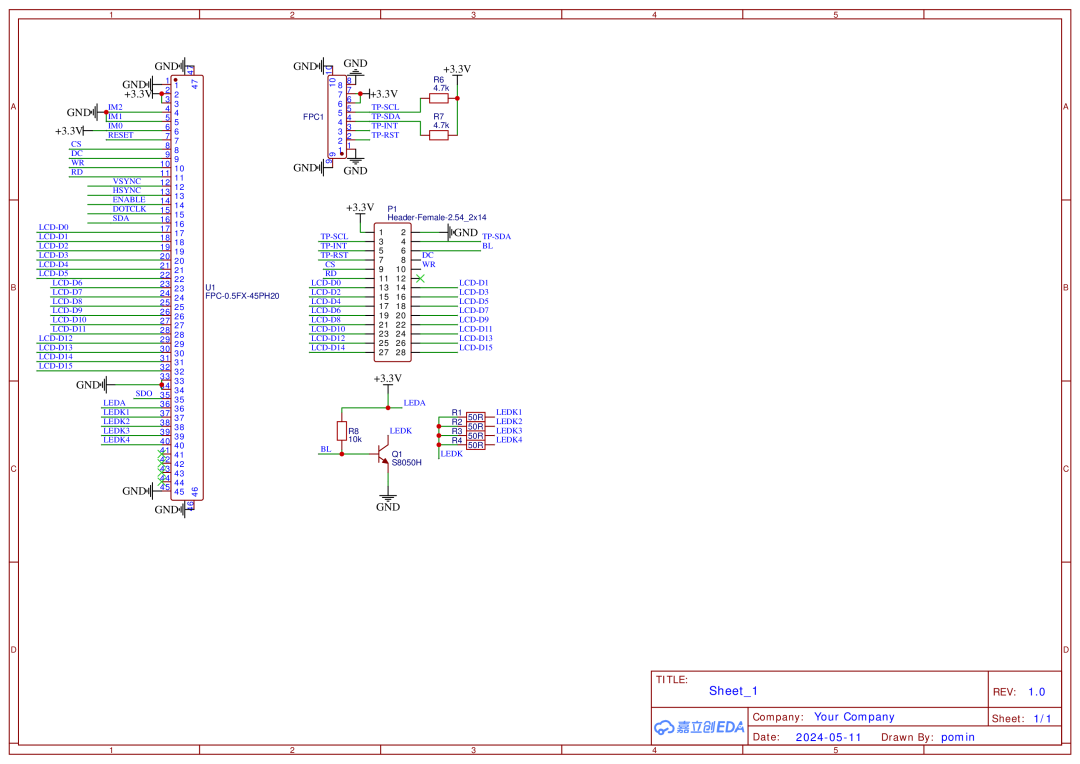
屏幕拓展板
FRDM-MCXN947 这个开发板预留了一个 FlexIO 接口可以适配 8080 的并口屏,于是做了一个屏幕拓展板,把手里闲置的屏幕用起来
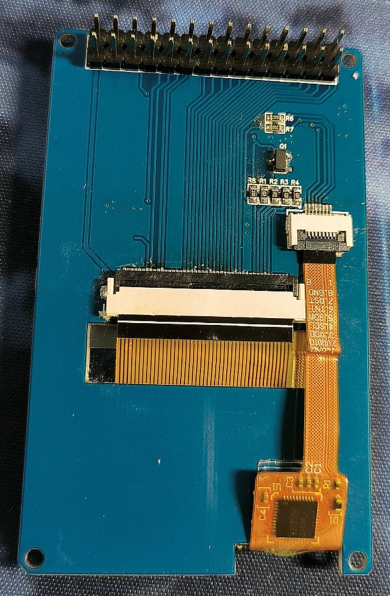
实物如下,触摸排线座子有点偏下,不过不影响功能
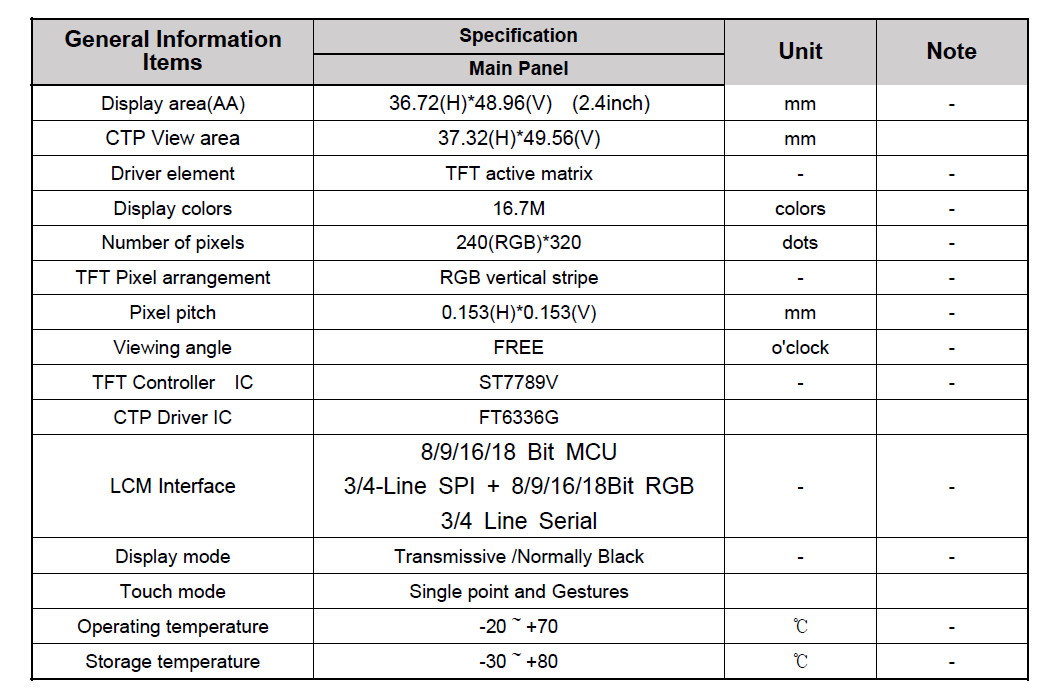
屏幕手册说明分辨率是 240*320 驱动芯片是 ST7789V、触摸芯片是 FT6336G,而官方的 SDK 中是有 ST7796 和 FT5406 的驱动代码的,后续还需要稍作修改
驱动适配
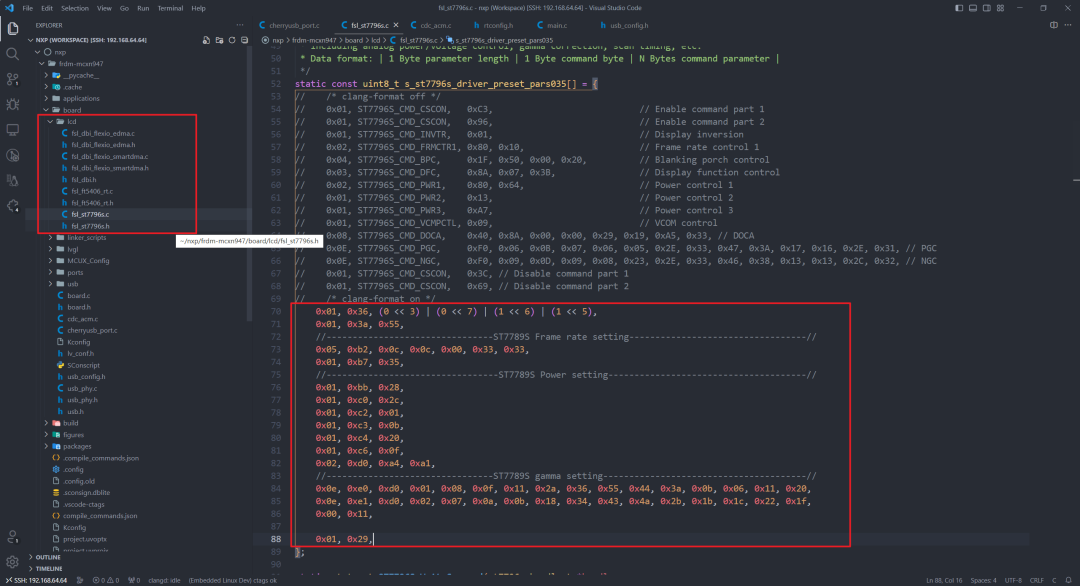
在官方的 SDK 中有 ST7796 和 FT5406 的驱动程序,直接移植过来即可,同时也把 EDMA 和 SMARTDMA 的驱动复制了过来,修改一下屏幕的初始化序列即可驱动屏幕
LVGL 适配
将SDK中的 lvgl_support 复制到工程中,修改屏幕的宽高为 240*320
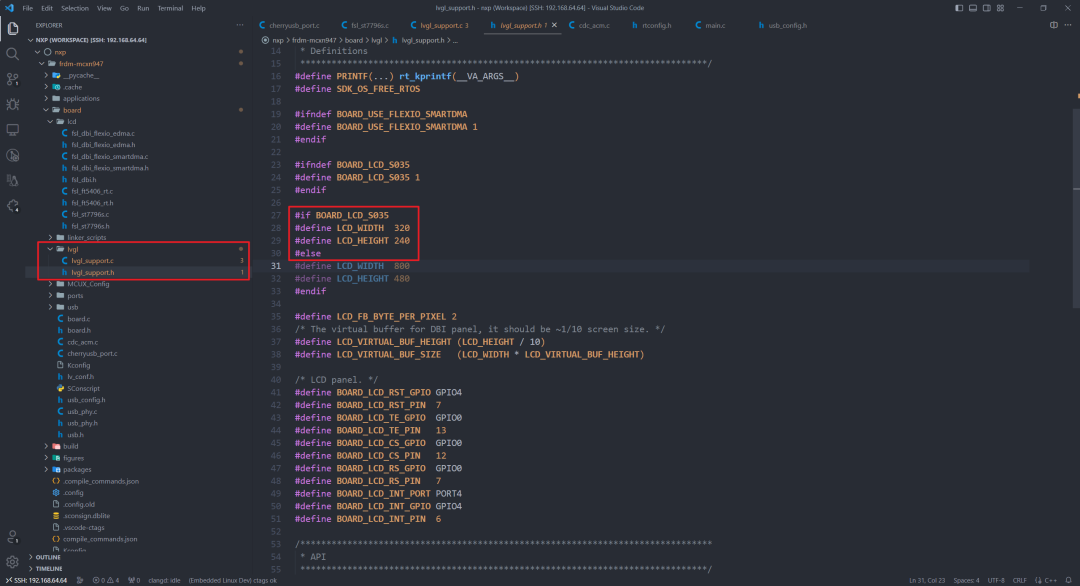
然后在 board 中新建一个 lv_conf.h 文件,填入关于 LVGL 的一些配置,因为许多配置在 menuconfig 中有所设置,所以这里的配置项并不多
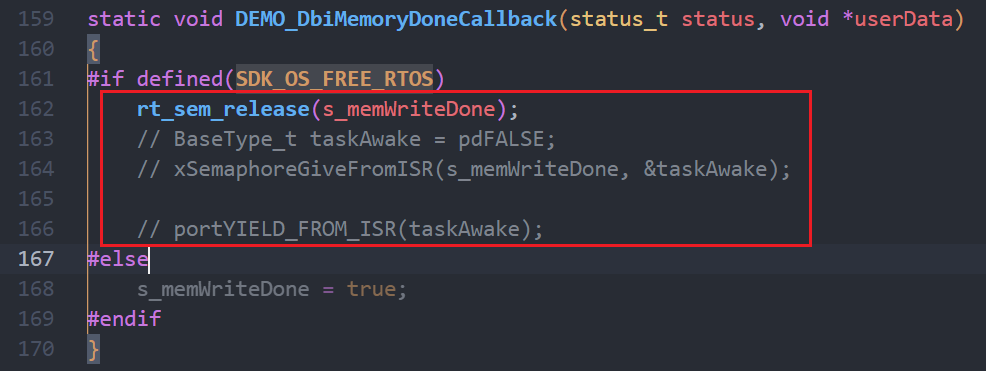
复制过来的 lvgl_support 中有对 FreeRTOS 的支持,这里将 FreeRTOS 的 API 修改为 RTT 的 API,例如如下这段代码
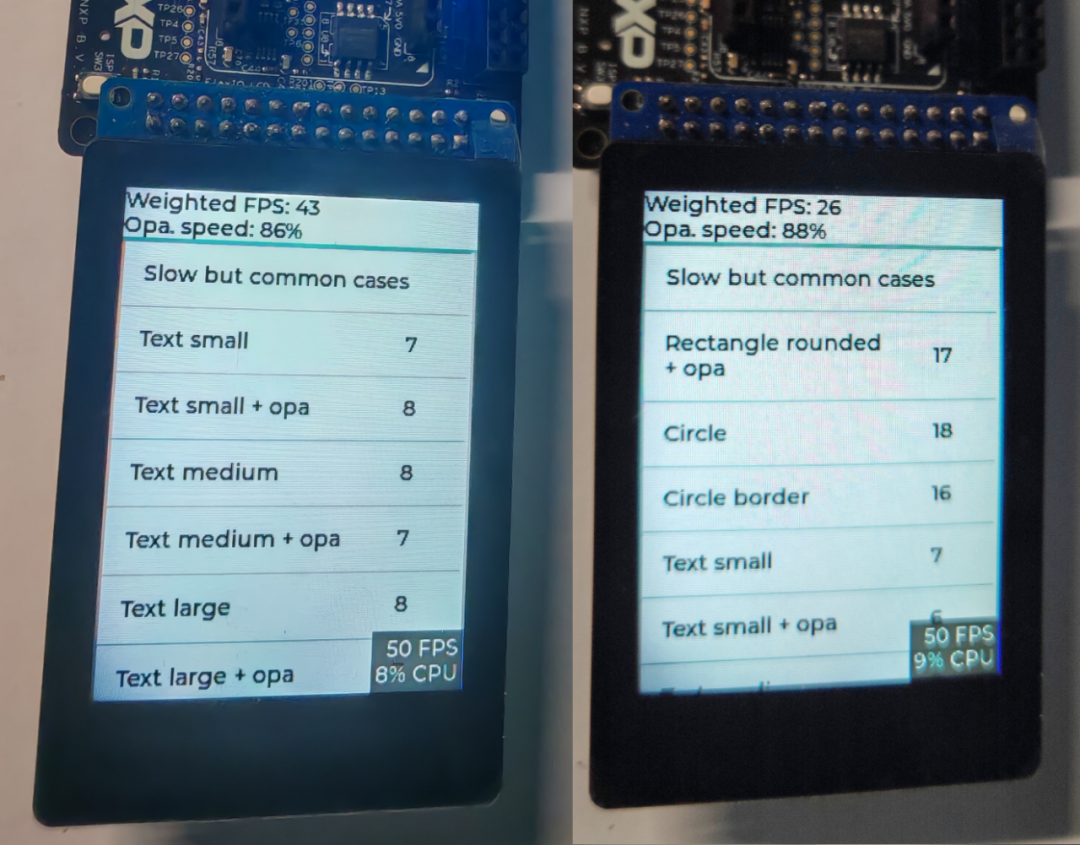
并且 N947 的驱动程序有 EDMA + FlexIO 和 SMARTDMA + FlexIO 两种驱动方式,具体区别不太了解,不过可以运行 LVGL 的 Benchmark 测试来看下结果,左边是 SMARTDMA 运行的结果,右边是 EDMA 的结果,可以看到前者的 FPS 更高。后续也就继续采用 SMARTDMA + FlexIO 的驱动方式
界面设计
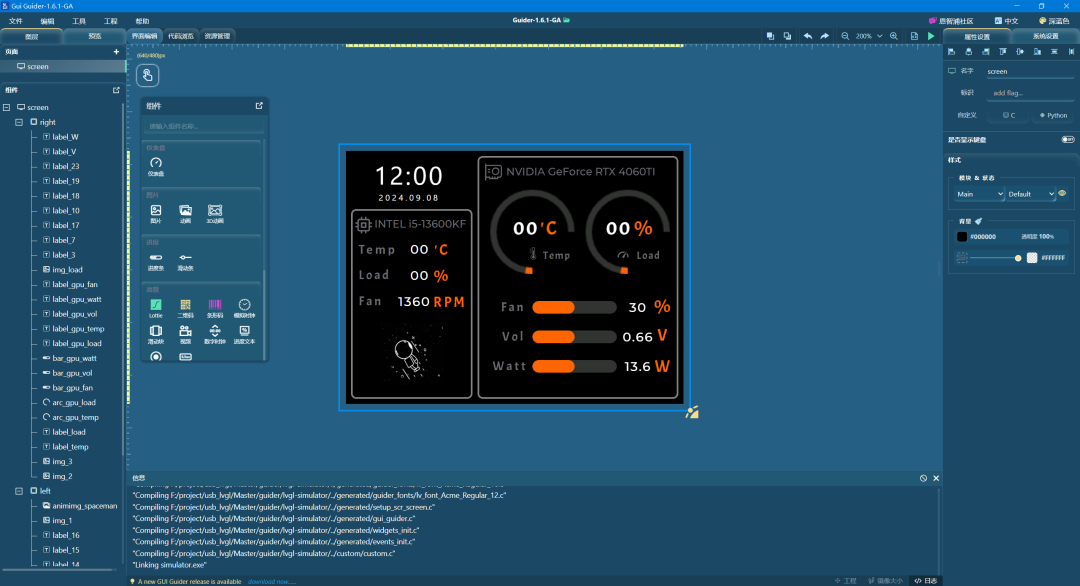
然后使用 GUI Guider 设计一个界面,生成绘制界面的代码,然后添加到工程中
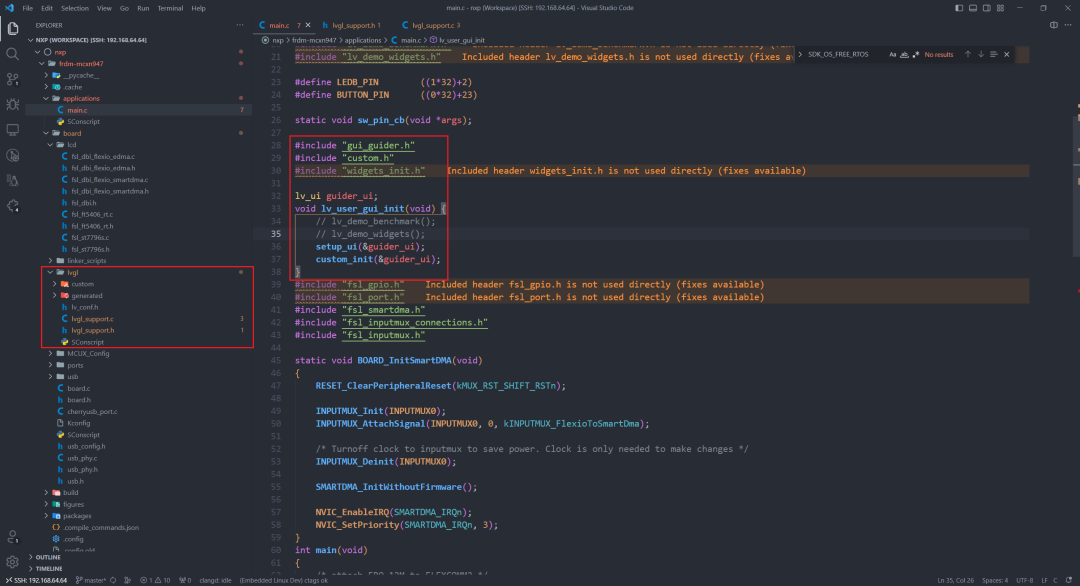
还需要修改工程文件夹中的 rtconfig.py,增加一个 LV_LVGL_H_INCLUDE_SIMPLE 的预定义,因为生成的代码默认包含 lvgl.h 是 #include "lvgl/lvgl.h"
最终适配完成的 LVGL 代码和 GUI Guider 的代码目录如下,LVGL 的 UI 绘制代码段如图右边所示,具体代码可见开源地址
USB 通讯
适配 CDC
完成了下位机的界面的初始化绘制,后续的任务当然就是怎么把数据采集并发送给下位机来更新界面的数据了,下面先完成 USB 的通讯,这里使用的是 RTT 官方推荐的 CherryUSB 这个开源 USB 协议栈
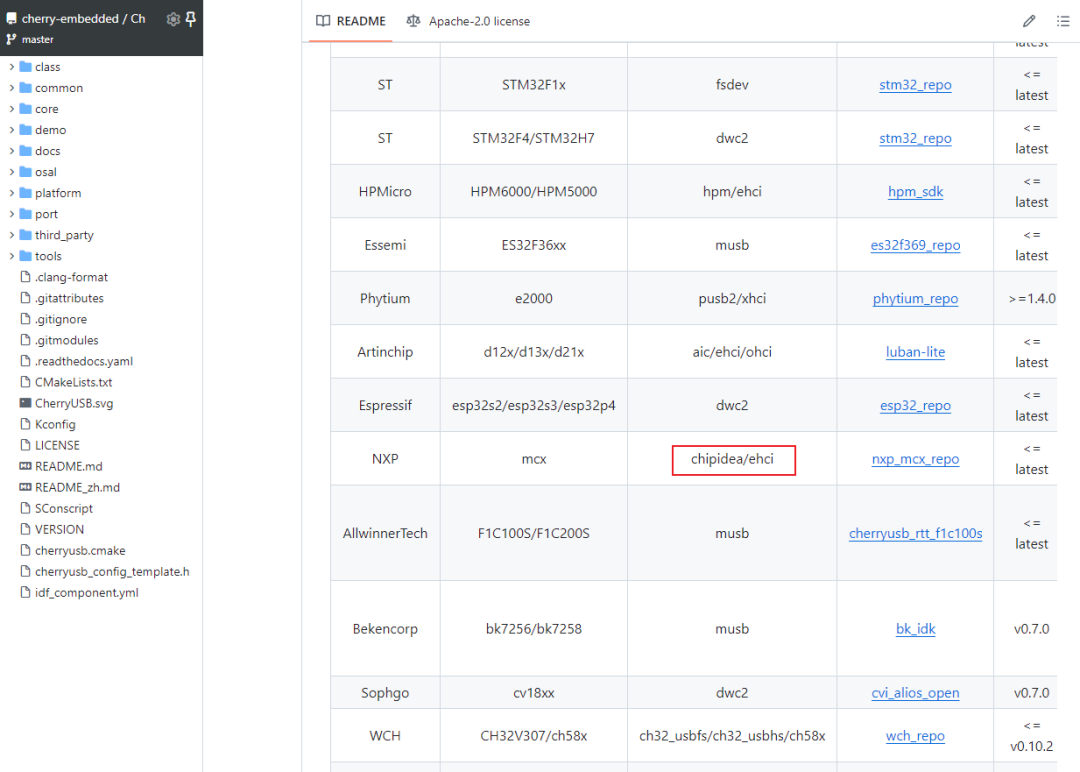
将如下链接中的适配代码复制到工程中
https://github.com/CherryUSB/cherryusb_mcx
因为传输的数据比较单一,这里使用串口屏的思路,直接用 CDC_ACM 的通讯方式,也就是在上位机显示为一个 USB 转串口设备,直接使用串口 API 完成通讯
将 RTT 根目录中 rt-thread/components/drivers/usb/cherryusb/demo 文件夹中的 CDC_ACM 例程复制到工程中,并且把根目录中的这两行代码屏蔽
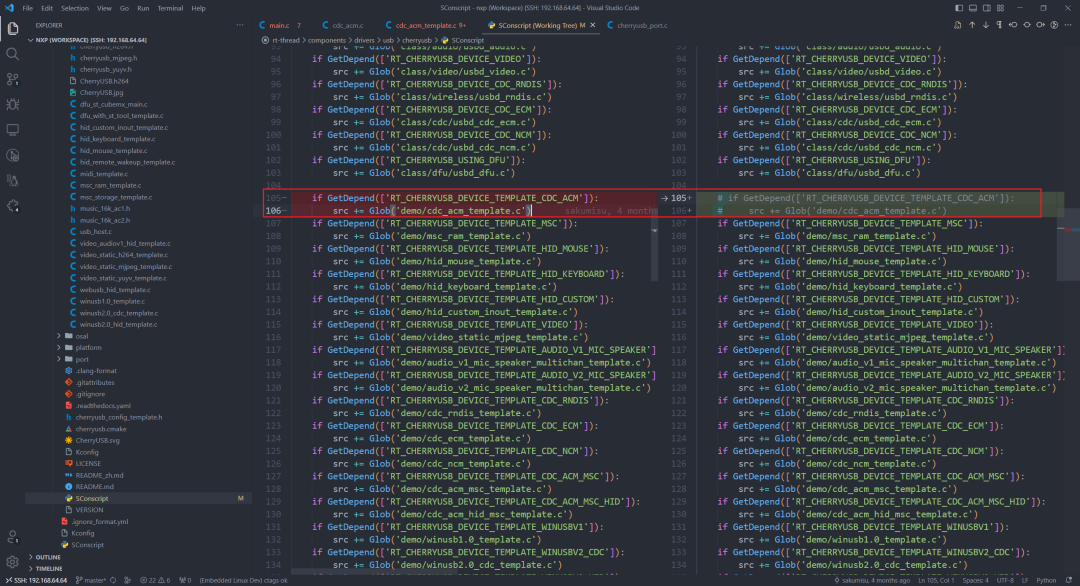
修改工程中的 cherryusb_port.c 文件,添加对 CDC_ACM 的支持
/* * Copyright (c) 2006-2024, RT-Thread Development Team * * SPDX-License-Identifier: Apache-2.0 * * Change Logs: * Date Author Notes * 2024/04/23 sakumisu first version */#include #include /* low level init here, this has implemented in cherryusb *//* low level deinit here, this has implemented in cherryusb */#ifdef RT_CHERRYUSB_DEVICE_TEMPLATE_CDC_ACMint cherryusb_devinit(void){ // extern void cherryusb_devinit(uint8_t busid, uintptr_t reg_base); extern void cdc_acm_init(uint8_t busid, uintptr_t reg_base); cdc_acm_init(0, USBHS1__USBC_BASE); return 0;}INIT_COMPONENT_EXPORT(cherryusb_devinit);#endif#ifdef RT_CHERRYUSB_DEVICE_TEMPLATE_MSCint cherryusb_devinit(void){ extern void msc_ram_init(uint8_t busid, uintptr_t reg_base); msc_ram_init(0, USBHS1__USBC_BASE); return 0;}INIT_COMPONENT_EXPORT(cherryusb_devinit);#endif#ifdef RT_CHERRYUSB_HOST#include "usbh_core.h"int cherryusb_hostinit(void){ usbh_initialize(0, USBHS1__USBC_BASE); return 0;}INIT_COMPONENT_EXPORT(cherryusb_hostinit);#endif将刚才复制到工程中的 CDC_ACM 的 demo 程序中端点收发的程序做如下修改,增加对于输入信息的回显
void usbd_cdc_acm_bulk_out(uint8_t busid, uint8_t ep, uint32_t nbytes){ USB_LOG_RAW("actual out len:%d\r\n", nbytes); /* setup next out ep read transfer */ usbd_ep_start_read(busid, CDC_OUT_EP, read_buffer, 2048); for (int i = 0; i < nbytes; i++) { printf("%02x ", read_buffer[i]); } printf("\r\n");}验证
然后插上开发板的 USB HS 那个 USB 接口,用串口工具发个数据包
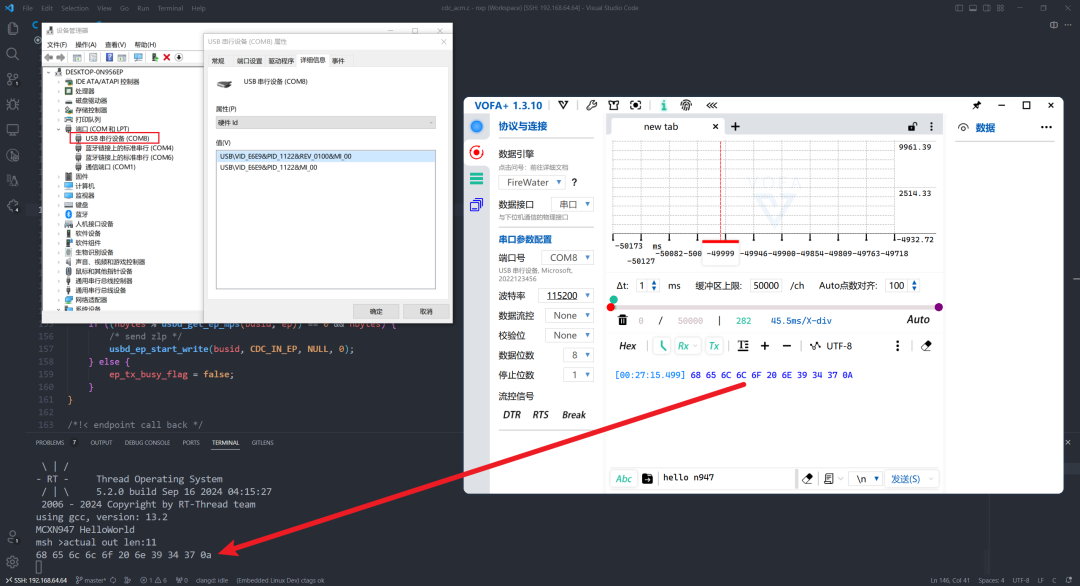
可以看到 已经识别成了 USB 串行设备,PID 和 VID 也是我自己设置的 0xE6E9 和 0x1122,后续上位机与开发板建立通讯锁定 COM 号就是依靠 PID VID 来查询实现,使用串口工具给开发板发送的数据也可以正常接收到
上位机
时间原因上位机做的比较简单,实现了如下几个功能:
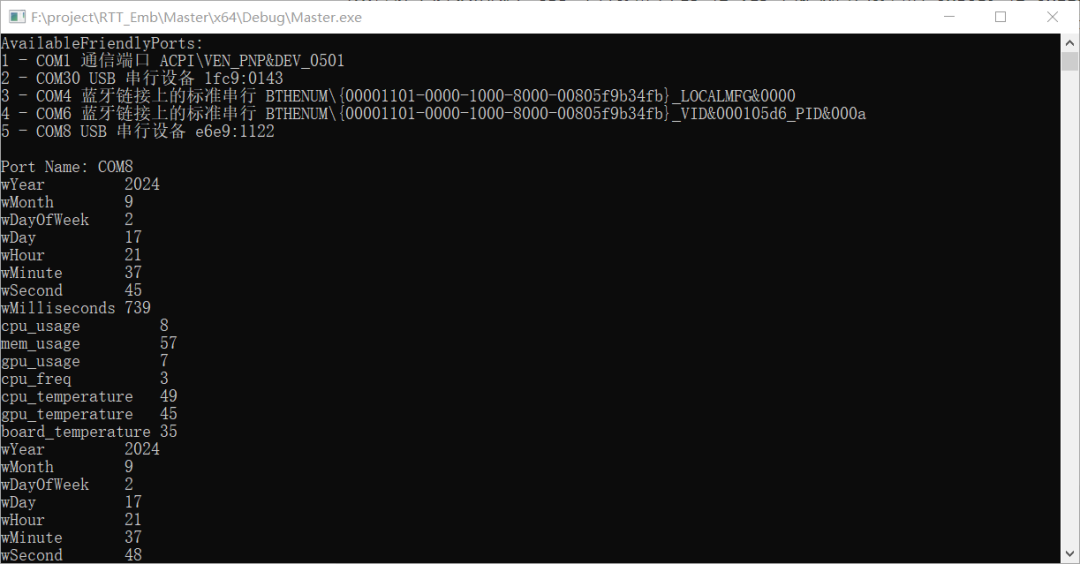
读取电脑的 CPU、GPU 的占用率和温度信息、获取当前时间
根据 VID、PID 查询 COM来与开发板通讯,下发采集数据与时间
增加帧头后发送到下位机,固定长度 32+2 个字节
下位机数据更新
在开发板端增加一个 thread 来负责把 USB 接收到的数据更新到屏幕上面,使用 LVGL 的 API 直接修改数据即可,代码如下
数据结构体
typedef struct{ uint16_t cpu_usage; uint16_t mem_usage; uint16_t gpu_usage; uint16_t cpu_freq; uint16_t cpu_temperature; uint16_t gpu_temperature; uint16_t board_temperature;} monitor_info_u16_t;typedef struct { uint16_t wYear; uint16_t wMonth; uint16_t wDayOfWeek; uint16_t wDay; uint16_t wHour; uint16_t wMinute; uint16_t wSecond; uint16_t wMilliseconds;} mytime_t;在 USB 端点输出的回调函数中增加消息队列发送函数
void usbd_cdc_acm_bulk_out(uint8_t busid, uint8_t ep, uint32_t nbytes){ USB_LOG_RAW("actual out len:%d\r\n", nbytes); /* setup next out ep read transfer */ usbd_ep_start_read(busid, CDC_OUT_EP, read_buffer, 2048); for (int i = 0; i < nbytes; i++) { printf("%02x ", read_buffer[i]); } printf("\r\n"); if (34 == nbytes) { rt_mq_send(&usb_mq, read_buffer, 34); }}main 函数中的接收消息队列
uint8_t read_buffer[128];while (1){ /* 从消息队列中接收消息 */ if (rt_mq_recv(&usb_mq, read_buffer, 34, RT_WAITING_FOREVER) > 0) { mytime_t* p_time_u16 = (mytime_t*)(read_buffer + 2); monitor_info_u16_t* p_info_u16 = (monitor_info_u16_t *)(read_buffer + 2 + sizeof(mytime_t)); rt_kprintf("wYear %u\r\n", p_time_u16->wYear); rt_kprintf("wMonth %u\r\n", p_time_u16->wMonth); rt_kprintf("wDayOfWeek %u\r\n", p_time_u16->wDayOfWeek); rt_kprintf("wDay %u\r\n", p_time_u16->wDay); rt_kprintf("wHour %u\r\n", p_time_u16->wHour); rt_kprintf("wMinute %u\r\n", p_time_u16->wMinute); rt_kprintf("wSecond %u\r\n", p_time_u16->wSecond); rt_kprintf("wMilliseconds %u\r\n", p_time_u16->wMilliseconds); rt_kprintf("cpu_usage %u\r\n", p_info_u16->cpu_usage); rt_kprintf("mem_usage %u\r\n", p_info_u16->mem_usage); rt_kprintf("gpu_usage %u\r\n", p_info_u16->gpu_usage); rt_kprintf("cpu_freq %u\r\n", p_info_u16->cpu_freq); rt_kprintf("cpu_temperature %u\r\n", p_info_u16->cpu_temperature); rt_kprintf("gpu_temperature %u\r\n", p_info_u16->gpu_temperature); rt_kprintf("board_temperature %u\r\n", p_info_u16->board_temperature); lv_label_set_text_fmt(guider_ui.screen_label_cpu_temp, "%2d", p_info_u16->cpu_temperature); lv_label_set_text_fmt(guider_ui.screen_label_gpu_temp, "%2d", p_info_u16->gpu_temperature); lv_label_set_text_fmt(guider_ui.screen_label_cpu_load, "%2d", p_info_u16->cpu_usage); lv_label_set_text_fmt(guider_ui.screen_label_gpu_load, "%2d", p_info_u16->gpu_usage); lv_arc_set_value(guider_ui.screen_arc_gpu_load, p_info_u16->gpu_usage); lv_arc_set_value(guider_ui.screen_arc_gpu_temp, p_info_u16->gpu_temperature); lv_label_set_text_fmt(guider_ui.screen_time, "%02d:%02d", p_time_u16->wHour, p_time_u16->wMinute); lv_label_set_text_fmt(guider_ui.screen_date, "%02d.%02d.%02d", p_time_u16->wYear, p_time_u16->wMonth, p_time_u16->wDay); }}成品效果
目前支持了对于时间、日期、CPU、GPU 的占用率和温度信息,其他的信息还在完善当中

下位机代码可见GitHub:https://github.com/POMIN-163/FRDM-MCXN947-USB-Monitor
上位机代码.zip(https://club.rt-thread.org/file_download/412971c88469523e)
视频.mp4(https://club.rt-thread.org/file_download/ac333cc9ed03e24b)



想要在RT-Thread平台或社区投放内容?或想参与相关直播活动及赛事?RT-Thread已开放对接窗口,请通过邮件与我们取得联系,期待合作!
