撰稿人:高楠
论文题目:透明物体非侵入式三维重建方法综述(特邀)
作者:高楠,王鹏程,刘泽圳,倪育博,孟召宗,张宗华
完成单位:河北工业大学 机械工程学院
导读
玻璃、透镜以及显示屏等透明物体在各个领域有着大量需求和应用,需要快速、精确和完整地对它们进行三维重建,从而客观描述物体形态、检测表面质量和保障元器件功能。但由于透明物体表面的镜面反射和折射特性,传统的三维重建方法并不适合直接应用于其三维形貌测量。为此,概述了透明物体的非侵入式三维重建方法,从基于反射光重建和基于透射光重建两个方面展开,回顾了近年来的主要研究工作。然后,详细比较了各种技术的优缺点及其适用情况,使用者们可以根据不同应用需求和测量条件选择合适的透明物体重建方案。最后,展望了该领域未来的研究方向,希望能为研究人员在完善现有方法或探索新方法时提供参考和思路。
研究背景
透明物体是三维重建中一个具有挑战性的任务目标,但在使用飞行时间法、结构光投影法、光度立体法、立体视觉等传统方法测量其三维形貌时,效果并不好,甚至不能完成重建过程。这是由于透明表面与光线之间存在复杂的相互作用关系、缺乏局部外观、折射参数未知且不均,使得信息获取、特征匹配、数据处理等过程更加困难,从而给透明物体的三维重建带来极大挑战。
近年来,国内外专家和学者已经在该方向上探索出众多解决方案,总体上分为两类:侵入式方法和非侵入式方法。其中侵入式方法在数字化透明物体的过程中涉及对表面的物理干预,会对物体的结构、性质或其他方面产生一定程度的影响。因此,人们研发了各种非侵入式测量系统和技术,通过相机拍摄经透明物体表面反射或折射后的变形图案来恢复三维形貌。这种变形是表面形状、周围背景和照明条件三者共同作用的结果,还需进行大量工作才能从中提取出透明物体的准确外观。根据测量所使用的光学信号类型,本文将其分为基于反射光重建的方法和基于透射光重建的方法,并详细介绍了这两类方法的研究进展。
主要内容
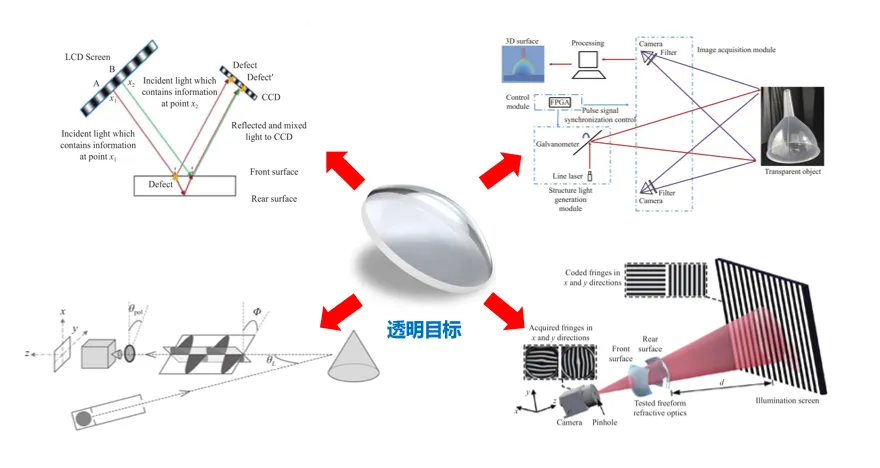
基于扫描的方法依赖三角测量原理完成重建。可见光扫描技术利用透明表面的镜面反射属性,能量、轮廓、法线等附加信息的引入对透明物体三维重建起到了积极的辅助作用。非可见光扫描技术下的一些透明表面拥有类似于可见光范围内漫反射物体的光学属性,不需要根据反射定律调整扫描仪位置,为透明物体三维扫描提供了新途径。但同时会引入昂贵的非可见光生成和成像装置,复杂的校准流程也限制了其应用。
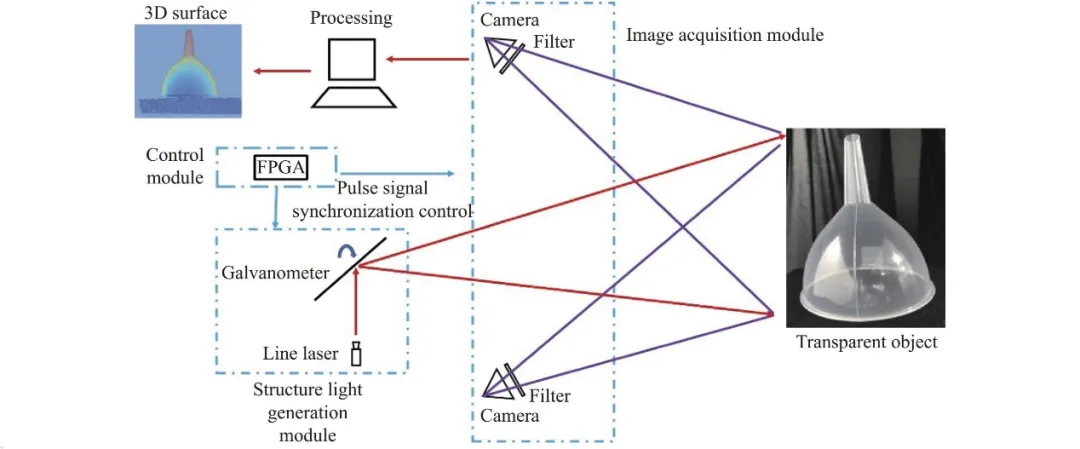
图1 立体激光扫描系统
从偏振恢复形状(Shape From Polarization, SFP)的概念,既可以在独立系统中应用,也可作为对三角测量、变形测量、立体视觉等传统方法的有效补充。前者依次消除天顶角和方位角歧义,计算表面法线,并将其转换为高度图。此类方法仅依赖于偏振提供的弱形状线索,结果容易受到噪声影响,且不能保证可积性。后者试图通过结合其他重建技术消除偏振中的法向量模糊,额外的形状线索可以用来增强偏振。只要入射光不是偏振光,这些方法在室内、室外或图案照明等不同照明条件下也具有相当的鲁棒性和稳定性。目前,解决两种角度模糊导致的法向量歧义仍是透明物体偏振三维成像技术发展的重点和难点,需要进一步研究。
图2 iQPM相位灵敏度提升透明物体的偏振三维成像:(a)测量过程;(b)法向量示意图;(c)基于镜面反射的偏振三维成像偏振度与不同折射率天顶角的关系;(d)光强信息随偏振片旋转角度的变化策略
反射式相位偏折测量术(Reflective Phase Measuring Deflectometry, RPMD)具有动态范围大、灵敏度高、精度高以及全场测量等优点,寄生反射是其面临的主要挑战。抑制后表面反射、空间域分离条纹和频域解耦条纹等方法拥有各自的优缺点,且最多能恢复透明物体的双表面,对于更复杂的物体则束手无策,例如中空或细节特征丰富的透明物体。原则上,图像中的每个反射都可以用来估计产生它们的表面,如果有技术能分离高阶反射信号,那么恢复复杂透明物体的特定表面将不再是一个难题。
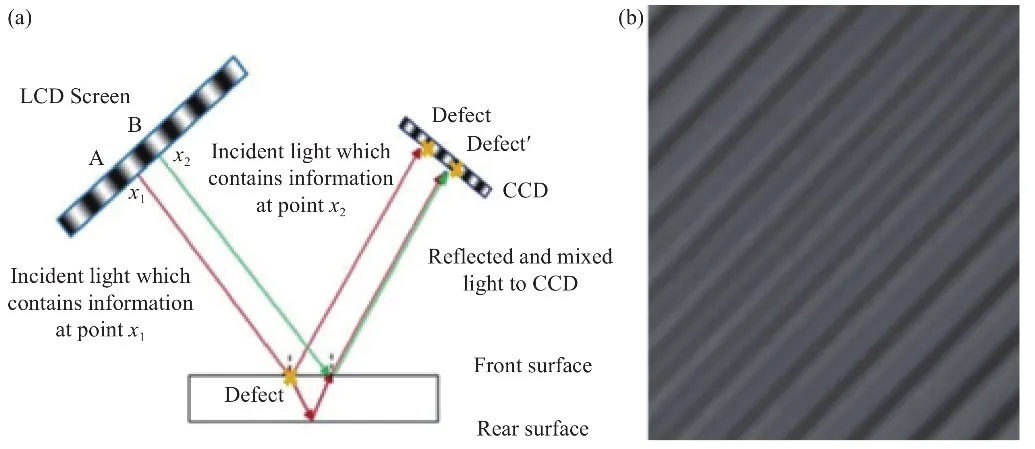
图3 寄生反射的原因和现象:(a)寄生反射产生过程;(b)鬼影条纹
透射式相位偏折测量术(Transmissive Phase Measuring Deflectometry, TPMD)是透射性元件波前检测的优选技术,尤其在精密光学制造、光学镜头质量控制、透明材料加工等领域有着广泛应用。此外,还被应用于对整体形貌精度要求不高的缺陷检测,微小划痕、厚度差异和折射率变化都能被检测出来。采用额外信息解耦的方法试图单独考虑每个表面对图案变形的贡献,而应用射线追迹技术的方法通常利用透明物体的整体折射效应进行形状测量。但不论是哪种方法,在面对透明物体复杂的折射特性时,都可能出现形状模糊,移动参考平面或融合不同相机视图对解决这一问题有很大帮助。
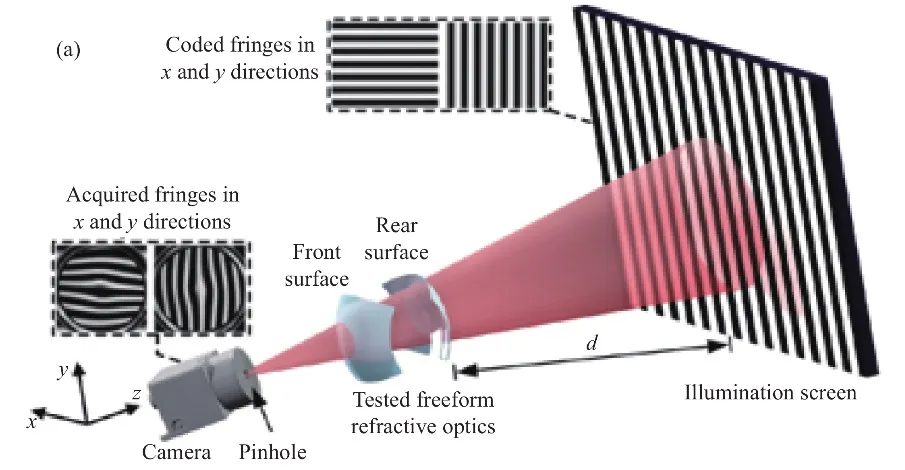
图4 透射式计算机辅助光学偏折系统
立体视觉(Stereo Vision)技术则以其高精度和较低的成本,成为处理复杂透明物体的有力工具。使用这种方法的前提是需要通过标定获取不同相机之间的相对位置关系,以实现准确测量。整个系统运行的快慢则由图像采集速度和算法处理效率共同决定,支持满足从即时反馈到详尽分析的多元化应用场景需求。然而,该类技术不得不直面高计算复杂度带来的严峻挑战,一方面要通过大量图像来寻找光线对应关系,另一方面还要匹配不同视角下的图像,从而迭代优化并重构物体表面的精细形态。
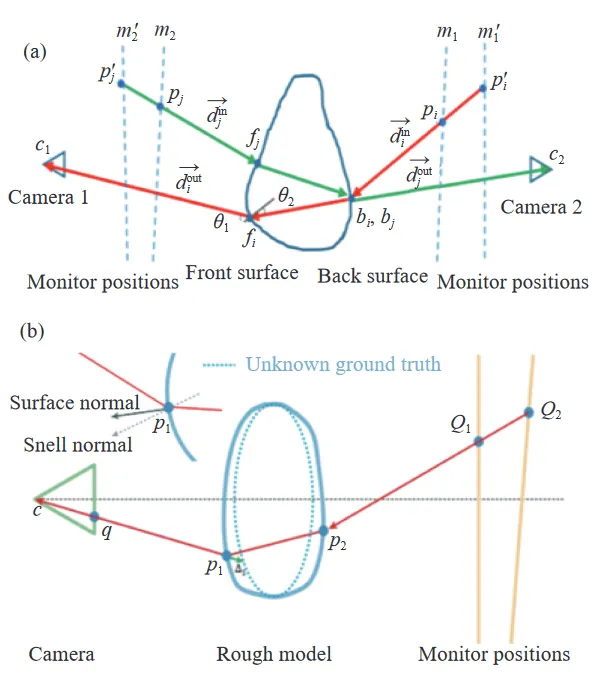
图5 各种基于法线一致性约束方法的原理示意图
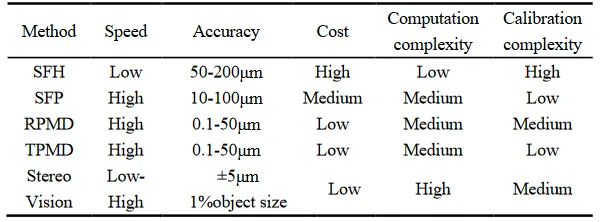
为了对这些非侵入式方法有一个更清晰的认识,文中从速度、精度、成本、计算复杂度、标定复杂度等多个角度对它们进行对比。
表1 透明物体三维重建方法总结对比
结论
本文旨在提供透明物体三维重建方法的最新和总体概述,特别是非侵入式系统和技术。基于反射光重建的方法利用透明物体的镜面特性,通过获取表面的线性反射场,绕过光线与物体之间复杂的相互作用,能够重建内部复杂、不均匀的透明物体。但需要解决物体内部间接光传输的干扰,以及精确控制和调整光源的位置。基于透射光重建的方法利用位于透明物体后方的面积平面光源来呈现调制图案,其传播光路除了依赖于表面法线外,还会受到折射率影响,能够更好表达透明物体的独特特征。但折射光线路径难以跟踪分析,且需执行额外且严格的约束以解决优化程序中深度法向量的歧义问题。每类方法都有其优缺点,应根据具体应用需求、预算以及对精度、速度和易用性的要求选择合适的技术。