网站:bbs.21ic.com
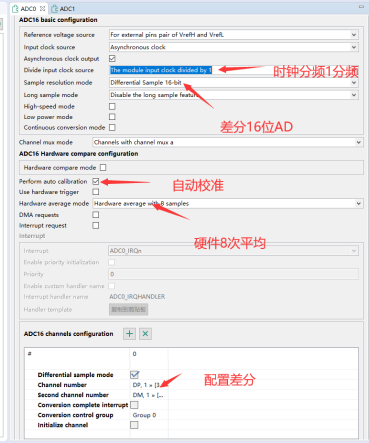
/******************************************************************************** Definitions******************************************************************************/#define DEMO_ADC16_CHANNEL 1U#define DEMO_ADC16_CHANNEL_GROUP 0U#define DEMO_ADC16_BASEADDR ADC0#define DEMO_DMAMUX_BASEADDR DMAMUX0#define DEMO_DMA_CHANNEL 1U#define DEMO_DMA_ADC0_SOURCE 40U#define DEMO_DMA_ADC1_SOURCE 41U#define DEMO_DMA_BASEADDR DMA0#define ADC16_RESULT_REG_ADDR 0x4003b010U#define ADC16_RESULT_REG_ADDR1 0x40027010U//查询寄存器手册得到#define DEMO_DMA_IRQ_ID DMA0_IRQn#define DEMO_ADC16_SAMPLE_COUNT 8U /* The ADC16 sample count. *//************************************************************************************************************************ ADC0 initialization code**********************************************************************************************************************/adc16_channel_config_t ADC0_channelsConfig[1] = {{.channelNumber = 1U, //传输通道.enableDifferentialConversion = true, //差分模式.enableInterruptOnConversionCompleted = false, //使能传输完成中断}};const adc16_config_t ADC0_config = {.referenceVoltageSource = kADC16_ReferenceVoltageSourceVref,.clockSource = 0,.enableAsynchronousClock = false,.clockDivider = kADC16_ClockDivider1,.resolution = kADC16_ResolutionSE16Bit,.longSampleMode = kADC16_LongSampleDisabled,.enableHighSpeed = true,.enableLowPower = false,.enableContinuousConversion = false//连续的转换};const adc16_channel_mux_mode_t ADC0_muxMode = kADC16_ChannelMuxA;/* 硬件平均 8 */const adc16_hardware_average_mode_t ADC0_hardwareAverageMode = kADC16_HardwareAverageDisabled;void ADC0_init(void) {/* Initialize ADC16 converter */ADC16_Init(ADC0_PERIPHERAL, &ADC0_config);/* Make sure, that software trigger is used */ADC16_EnableHardwareTrigger(ADC0_PERIPHERAL, false);/* Configure hardware average mode */ADC16_SetHardwareAverage(ADC0_PERIPHERAL, ADC0_hardwareAverageMode);/* Configure channel multiplexing mode */ADC16_SetChannelMuxMode(ADC0_PERIPHERAL, ADC0_muxMode);/* Initialize channel */ADC16_SetChannelConfig(ADC0_PERIPHERAL, 0U, &ADC0_channelsConfig[0]);/* Perform auto calibration */ADC16_DoAutoCalibration(ADC0_PERIPHERAL);/* Enable DMA. */ADC16_EnableDMA(ADC0_PERIPHERAL, false);}/************************************************************************************************************************ ADC1 initialization code**********************************************************************************************************************/adc16_channel_config_t ADC1_channelsConfig[1] = {{.channelNumber = 2U,.enableDifferentialConversion = true, //差分模式.enableInterruptOnConversionCompleted = false,}};const adc16_config_t ADC1_config = {.referenceVoltageSource = kADC16_ReferenceVoltageSourceVref,.clockSource = 0,.enableAsynchronousClock = false,.clockDivider = kADC16_ClockDivider1,.resolution = kADC16_ResolutionSE16Bit,.longSampleMode = kADC16_LongSampleDisabled,.enableHighSpeed = true,.enableLowPower = false,.enableContinuousConversion = false//连续的转换};const adc16_channel_mux_mode_t ADC1_muxMode = kADC16_ChannelMuxA;const adc16_hardware_average_mode_t ADC1_hardwareAverageMode = kADC16_HardwareAverageDisabled;void ADC1_init(void) {// EnableIRQ(ADC0_IRQn);/* 初始化ADC16转换器 */ADC16_Init(ADC1_PERIPHERAL, &ADC1_config);/* 不使用软件触发器 */ADC16_EnableHardwareTrigger(ADC1_PERIPHERAL, false);/* 配置硬件平均模式 */ADC16_SetHardwareAverage(ADC1_PERIPHERAL, ADC1_hardwareAverageMode);/* 配置信道多路复用模式 */ADC16_SetChannelMuxMode(ADC1_PERIPHERAL, ADC1_muxMode);/* 初始化通道 */ADC16_SetChannelConfig(ADC1_PERIPHERAL, 1U, &ADC1_channelsConfig[0]);/* 自动校准 */ADC16_DoAutoCalibration(ADC1_PERIPHERAL);/* Enable DMA. */ADC16_EnableDMA(ADC1_PERIPHERAL, false);}
adc16_channel_config_t adc16ChannelConfigStruct;adc16ChannelConfigStruct.channelNumber = 1; //ADC通道adc16ChannelConfigStruct.channelNumber = 2;adc16ChannelConfigStruct.enableDifferentialConversion = true;//使能差分adc16ChannelConfigStruct.enableInterruptOnConversionCompleted = false;//失能中断ADC16_SetChannelConfig(ADC1, 0U, &adc16ChannelConfigStruct);ADC16_SetChannelConfig(ADC0, 0U, &adc16ChannelConfigStruct);while (0U == (kADC16_ChannelConversionDoneFlag &ADC16_GetChannelStatusFlags(ADC1, 0U)));ADC_Value0 = ADC16_GetChannelConversionValue(ADC0, 0U);ADC_Value1 = ADC16_GetChannelConversionValue(ADC1, 0U);
void EDMA_Configuration(void){edma_config_t userConfig;/* 配置 DMAMUX */DMAMUX_Init(DMAMUX);/* 通道CH1初始化 */DMAMUX_SetSource(DMAMUX, 1, 40); /* Map ADC0 source to channel 1 */DMAMUX_EnableChannel(DMAMUX, 1);/* 通道CH2初始化 */DMAMUX_SetSource(DMAMUX, 2, 41);/* Map ADC1 source to channel 2 */DMAMUX_EnableChannel(DMAMUX, 2);/* 获取eDMA默认配置结构 */EDMA_GetDefaultConfig(&userConfig);EDMA_Init(DMA0, &userConfig);EDMA_CreateHandle(&g_EDMA_Handle, DMA0, 1);/* 设置回调 */EDMA_SetCallback(&g_EDMA_Handle, Edma_Callback, NULL);/*eDMA传输结构配置 .设置dma通道1的adc值传到g_adc16SampleDataArray*/EDMA_PrepareTransfer(&transferConfig, (void *)ADC16_RESULT_REG_ADDR, sizeof(uint32_t),(void *)g_adc16SampleDataArray, sizeof(uint32_t), sizeof(uint32_t),sizeof(g_adc16SampleDataArray), kEDMA_PeripheralToMemory);EDMA_SubmitTransfer(&g_EDMA_Handle, &transferConfig);/* Enable interrupt when transfer is done. */EDMA_EnableChannelInterrupts(DEMO_DMA_BASEADDR, DEMO_DMA_CHANNEL, kEDMA_MajorInterruptEnable);/* Enable async DMA request. */EDMA_EnableAsyncRequest(DEMO_DMA_BASEADDR, DEMO_DMA_CHANNEL, true);/* Enable transfer. */EDMA_StartTransfer(&g_EDMA_Handle);//将dma通道1链接到通道0EDMA_SetChannelLink(DMA0, 1, kEDMA_MinorLink, 2);EDMA_SetChannelLink(DMA0, 1, kEDMA_MajorLink,2);//*********************************************************************************************/EDMA_CreateHandle(&DMA_CH2_Handle, DMA0, 2);EDMA_SetCallback(&DMA_CH2_Handle, Edma_Callback1, NULL);/* 设置回调 */EDMA_PrepareTransfer(&g_transferConfig, (void *)ADC16_RESULT_REG_ADDR1, sizeof(uint32_t),(void *)g_adc16SampleDataArray1, sizeof(uint32_t), sizeof(uint32_t),sizeof(g_adc16SampleDataArray1), kEDMA_PeripheralToMemory);EDMA_SubmitTransfer(&DMA_CH2_Handle, &g_transferConfig);//传输完后修正通道DMA0->TCD[1].DLAST_SGA = -1* sizeof(g_adc16SampleDataArray);DMA0->TCD[2].DLAST_SGA = -1* sizeof(g_adc16SampleDataArray1);/* 当传输完成时启用中断. */EDMA_EnableChannelInterrupts(DEMO_DMA_BASEADDR, 2, kEDMA_MajorInterruptEnable);// /* 启用异步DMA请求 */EDMA_EnableAsyncRequest(DEMO_DMA_BASEADDR, 2, true);/* 使能数据传输 */EDMA_StartTransfer(&DMA_CH2_Handle);}
static void Edma_Callback(edma_handle_t *handle, void *userData, bool transferDone, uint32_t tcds){EDMA_StartTransfer(&g_EDMA_Handle);g_Transfer_Done = false;if (transferDone){g_Transfer_Done = true;}}static void Edma_Callback1(edma_handle_t *handle, void *userData, bool transferDone, uint32_t tcds){g_Transfer_Done1 = false;if (transferDone){g_Transfer_Done1 = true;}}
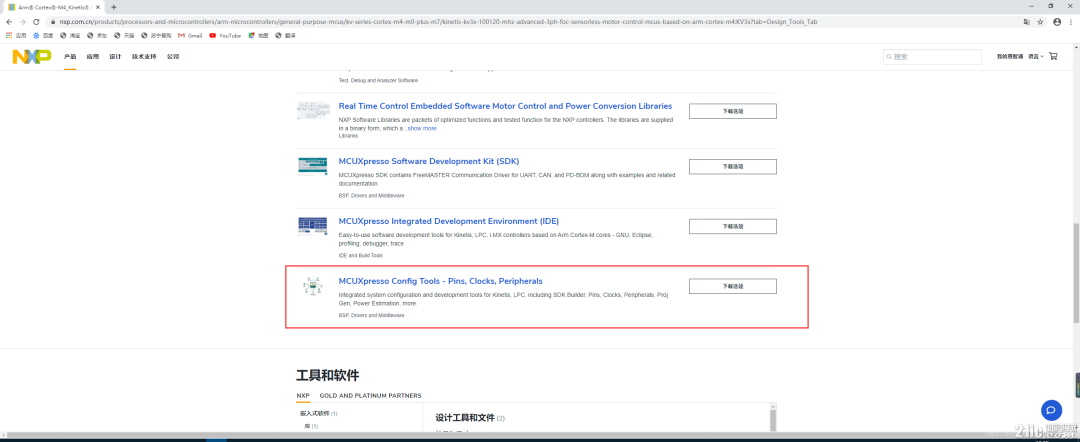
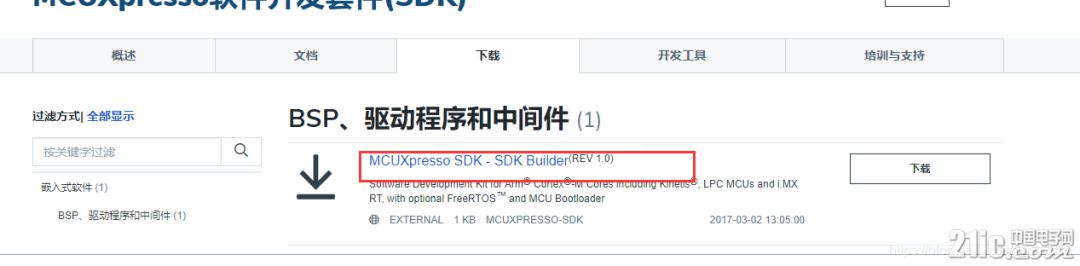
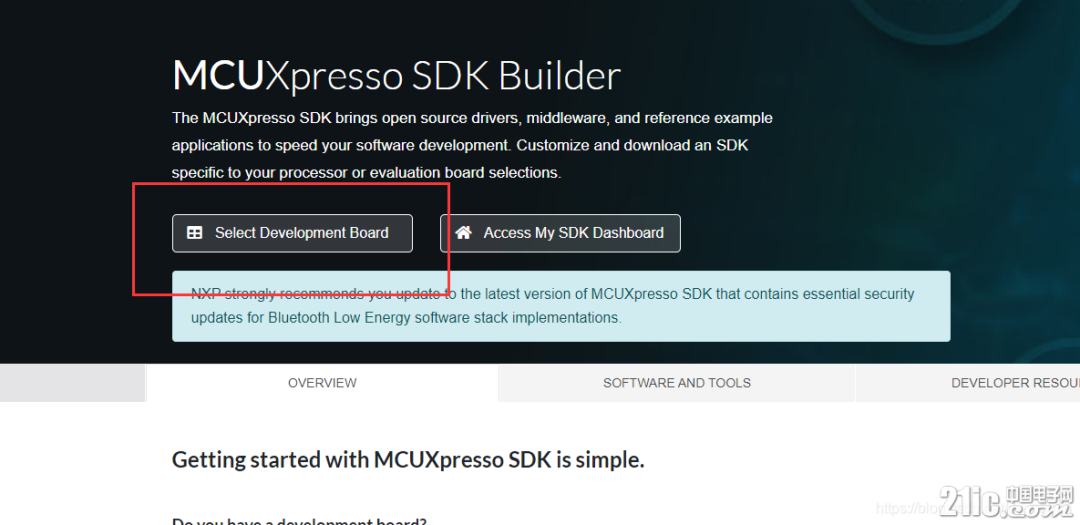
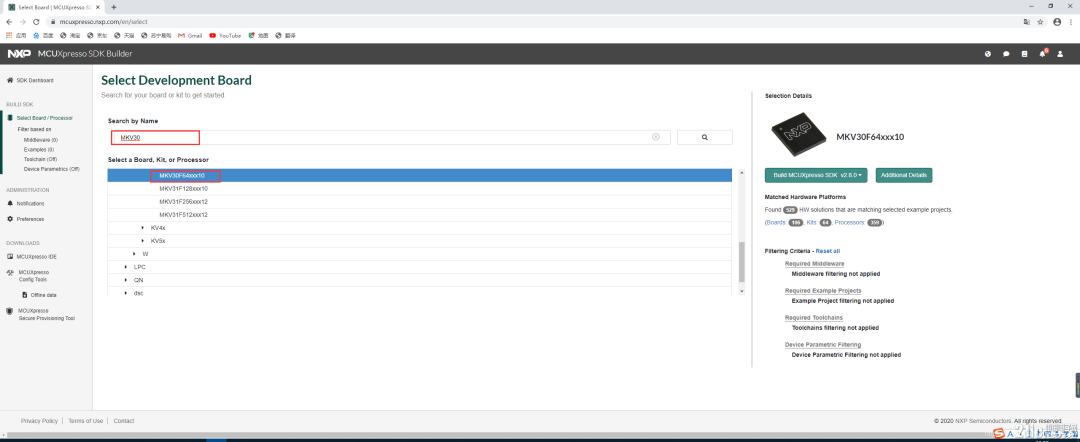
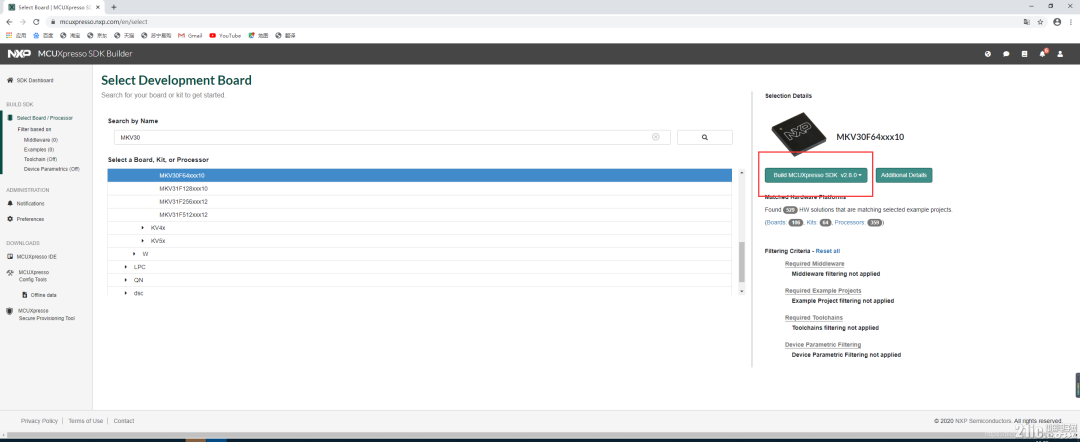
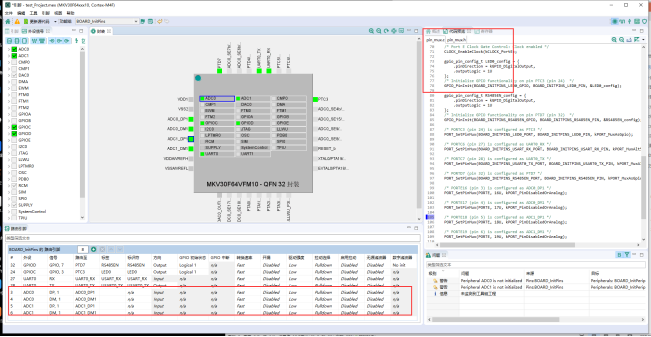
芯片的入门环境搭建