


引言
随着智能网联汽车的迅猛发展,车内通信系统正面临前所未有的挑战。海量传感器、执行器和计算单元之间需要进行实时、可靠、安全的数据交互,特别是在车载以太网逐渐成为主流的背景下,没有通信中间件的管理已难以满足这些需求。
目前,SOME/IP作为AUTOSAR定义的车载以太网通信中间件已被广泛采用,但其在实时性、可靠性等方面仍存在局限。而来自分布式计算领域的DDS(Data Distribution Service,数据分发服务)协议凭借其强大的功能和优势,已经在汽车自动驾驶通信中占有一席之地,并有望在更多车载网络领域取代SOME/IP。
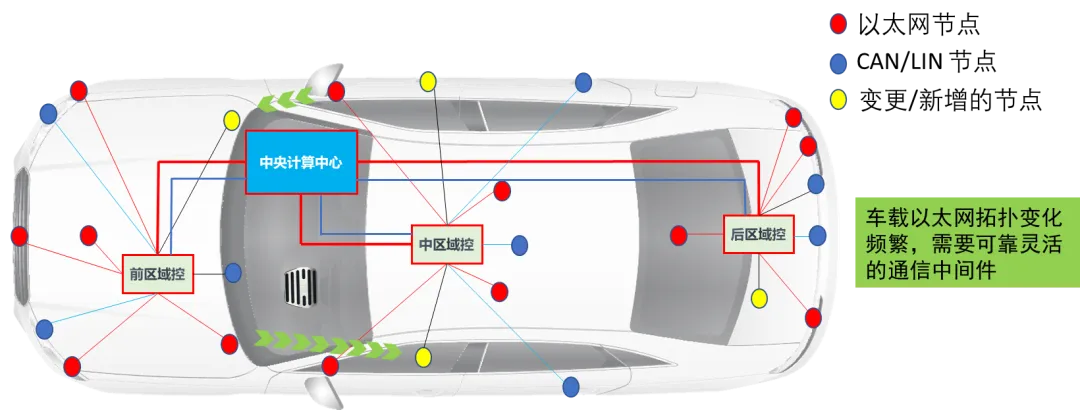
图1 日益复杂的汽车网络

DDS:车载以太网通信的未来之星
DDS是一种以数据为中心的发布/订阅式通信协议,由对象管理组织(Object Management Group,OMG)在2003年制定。它专为实时性、高可靠性、可扩展性、安全性而设计,能够在复杂网络环境中高效地传输海量数据。DDS在车载以太网通信领域具有多项突出优势:
丰富的QoS(Quality of Service,服务质量)机制:DDS规范提供多达数十种QoS策略,包括可靠性、实时性、持久性、安全性等,用户可根据应用需求灵活配置,实现最佳通信效果。
零拷贝通信:DDS支持共享内存作为本地通信介质,实现零拷贝数据传输,显著降低CPU负载,提高通信效率,尤其适用于高带宽、低延迟的车载以太网环境。
原生安全机制:DDS内置安全插件,提供身份验证、访问控制、数据加密等功能,保障数据传输的机密性、完整性和可用性,满足智能汽车对信息安全的高要求。
开放标准:DDS是一个内容开放且持续更新的国际标准,得到了广泛的行业支持,有利于促进不同厂商之间的互操作性,推动智能汽车生态系统的建设。
特性 | DDS | SOME/IP |
数据模型 | 以数据为中心,发布/订阅模式 | 以服务为中心,RPC (Remote Procedure Call)和事件通知 |
QoS 控制 | 丰富灵活的 QoS 控制,支持实时性、可靠性、安全性等 | 仅提供可靠性,实时性等QoS需要应用逻辑实现 |
传输协议 | 支持TCP/UDP,共享内存等多种底层协议,灵活性强 | 依赖TCP/UDP特性,很难在其他底层协议部署 |
安全性 | 协议自身支持数据加密、访问控制等安全机制 | 基于TLS(Transport Layer Security,传输层安全协议) |
调试环境 | 开发工具支持可视化界面进行仿真、调试、记录、QOS配置 | 抓包调试,需要分析者熟悉SOME/IP协议 |
图2 DDS和SOME/IP协议对比
联合电子作为领先的汽车电子解决方案提供商,深刻理解智能网联汽车对通信系统的苛刻要求。我们基于DDS协议,结合自身在软件开发、系统集成等方面的丰富经验,推出全方位的车载DDS通信解决方案。该方案涵盖硬件适配、软件优化和应用场景构建等多个层面,旨在帮助汽车制造商构建高性能、高可靠性、高安全性的车载以太网通信网络,加速智能网联汽车的研发和落地。
轻量化:协议栈瘦身带来更多可能
DDS协议虽然功能强大,但其完整的实现需要消耗较多的系统资源,尤其在资源受限的MCU端,传统的DDS协议栈难以部署。为了解决这一问题,联合电子车载DDS通信解决方案采用了轻量化DDS协议栈,通过对DDS的QoS进行裁剪,保留必要的QoS,从而显著降低协议栈的资源消耗,使其能够在MCU等资源受限的设备上高效运行。
此外,我们还创新性地将DDS与TSN(Time-Sensitive Networking,时间敏感网络)技术融合,进一步提升通信效率和可靠性。更进一步,我们充分利用DDS的分层架构,在资源受限的环境中直接使用较为底层的接口进行通信,实现极致轻量化。
QoS优化:平衡功能与资源
DDS协议提供了丰富的QoS策略,但并非所有场景都需要用到全部QoS。在车载通信系统中,不同应用对QoS的需求存在差异。例如,自动驾驶系统可能更关注实时性和可靠性,而车身控制系统则对资源消耗更为敏感。通过对DDS的QoS进行裁剪,可以根据具体应用场景的需求,保留必要的QoS,去除冗余功能,从而实现协议栈的轻量化。
联合电子车载DDS通信解决方案在QoS裁剪方面进行了深入研究和优化,提供多种预定义的QoS配置方案,涵盖不同应用场景的需求。用户也可以根据实际需求,自定义QoS配置,实现功能和资源的最佳平衡。
DDS与TSN融合:提升可靠性与效率
TSN作为一种新兴的车载以太网技术,通过时间同步、流量调度、拥塞控制等机制,为实时通信提供了可靠保障。联合电子车载DDS通信解决方案创新性地将DDS与TSN技术融合,如:利用TSN 802.1CB帧复制和帧消除机制替换DDS原生的确认重传机制,实现可靠数据传输,从而减少CPU负载,提升通信效率。
直接调用底层接口:极致轻量化
DDS协议采用分层架构,分为DCPS(以数据为中心的发布-订阅)层和RTPS(实时发布-订阅协议)层。对于资源极其受限的MCU等设备,联合电子轻量化DDS通信解决方案支持直接采用RTPS层进行通信,省略DCPS层的部分功能,而必要的QOS功能可以通过RTPS层以及TSN协议功能替代。这种方式可以在保证基本通信功能的前提下,最大限度地降低协议栈的资源消耗。
DDS协议栈轻量化给DDS
在ECU上的部署带来显著优势:
降低资源消耗:通过QoS裁剪、TSN融合和直接采用RTPS层,轻量化DDS协议栈显著降低了内存占用和CPU负载,提升了时延性能,使其能够在MCU等资源受限的设备上高效运行。
提升性能:轻量化协议栈减少了不必要的数据处理和传输,TSN的加持则进一步提升了通信效率和实时性。
灵活配置:用户可以根据具体应用场景的需求,灵活选择和配置QoS,实现功能和资源的最佳平衡。
兼容性:轻量化DDS协议栈仍然兼容标准DDS协议,保证了与其他DDS设备的互操作性。
下图为联合电子轻量化DDS协议栈(LW-DDS)和开源DDS协议栈Cyclone DDS的性能对比。
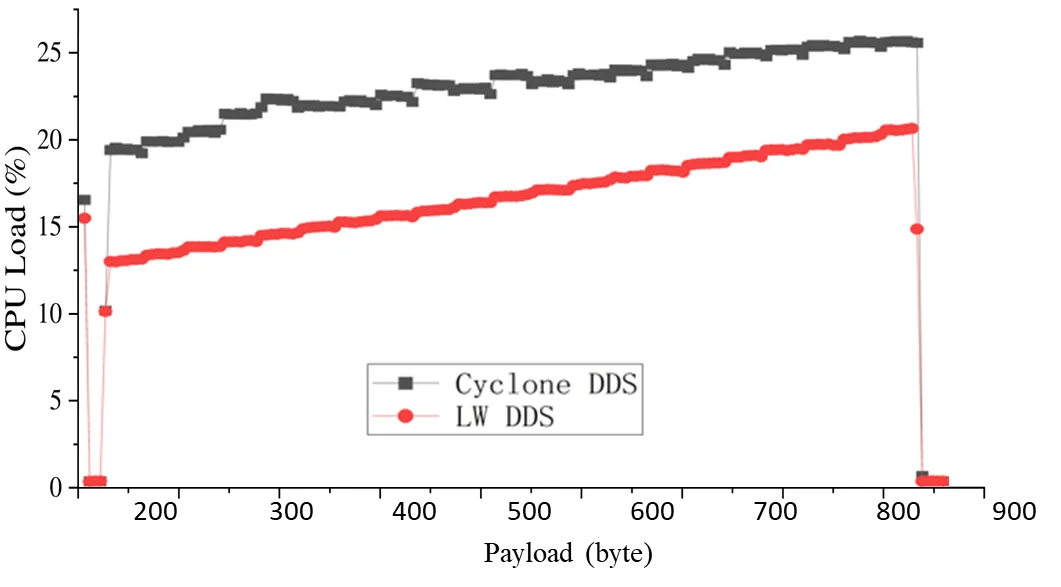
图3 MCU平台CPU负载对比(2ms发送间隔)
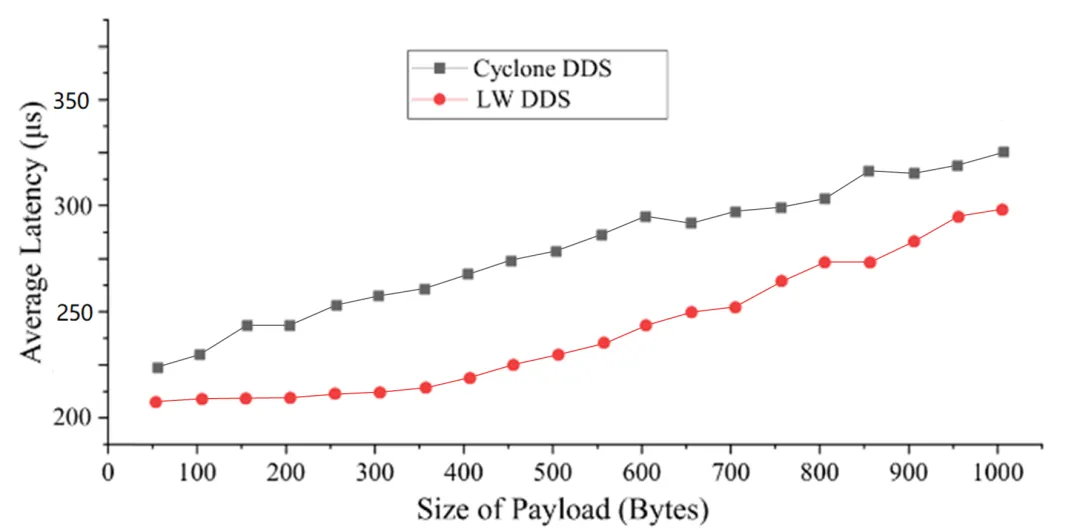
图4 MCU平台轻量化DDS时延性能对比
算力共享:智能汽车的未来趋势
随着智能驾驶、车载娱乐等功能的日益复杂,对车载计算能力的需求呈指数级增长。然而,受限于成本、功耗等因素,简单地堆砌硬件并非长久之计。算力共享作为一种创新的解决方案,通过在不同ECU(电子控制单元)之间动态分配和共享计算资源,实现资源利用率的最大化,最大化“压榨”车载控制器的计算能力。
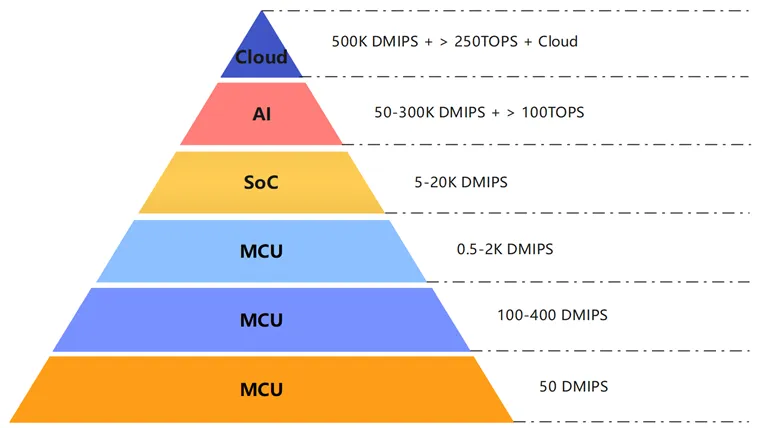
图5 汽车不同处理器的算力
DDS如何实现算力共享
DDS以其数据为中心、发布/订阅的通信模式,为算力共享提供了天然的支撑。
算力需求发布:需要额外算力的ECU可以发布算力需求信息,包括所需的计算类型、数据量、实时性要求等。
算力资源发布:拥有空闲算力的ECU可以发布算力资源信息,包括可提供的计算类型、性能指标等。
任务接受决策:拥有空闲算力的ECU在收到请求后决策是否接受任务,并第一时间反馈任务状态。
数据传输与结果返回:任务相关的数据通过DDS高效、可靠地传输到执行ECU,计算结果再通过DDS返回给需求方。
DDS在算力共享中的优势
实时性:DDS的实时通信能力保证了算力需求和资源信息的及时传递,以及任务调度和数据传输的低延迟。
可靠性:DDS的可靠传输机制确保了任务数据和计算结果的完整性和正确性,避免因数据丢失或错误导致的计算错误。
可扩展性:DDS的分布式架构使其能够灵活地适应车内网络的变化,支持新增ECU的接入和算力资源的动态调整。
应用场景
自动驾驶:在复杂的驾驶场景中,自动驾驶系统需要处理海量传感器数据,进行实时感知、决策和控制。通过算力共享,可以将部分计算任务分配给其他ECU,减轻主控ECU的负担,提高系统的响应速度和稳定性。
车载娱乐:车载娱乐系统对图形处理、音视频解码等计算能力的需求越来越高。通过算力共享,可以充分利用车内其他ECU的空闲资源,提升娱乐系统的性能和用户体验。
OTA升级:在进行OTA(空中下载)升级时,需要对大量数据进行校验和更新,对计算能力的需求较高。通过算力共享,可以加快升级过程,减少车辆停机时间。
结语
基于DDS实现的丰富应用场景为智能汽车的未来发展提供了巨大的潜力。联合电子车载DDS通信解决方案通过提供高性能、高可靠性、高安全性的通信基础设施,以及算力共享,为智能网联域融合提供了强有力的支持。我们相信,随着DDS技术的不断发展和完善,DDS中间件和基于DDS的应用场景将在智能汽车领域发挥越来越重要的作用,推动汽车智能化进程的加速发展。
推荐阅读
END
更多报告获取,欢迎加入知识星球(聚焦智能驾驶产业、智能座舱产业、新能源电动产业)!
免责声明
本文来源于网络收集,版权归原创作者及其公司所有,分享仅用于学习、交流,如有侵权请告知删除。
END
