

一、前言
前两天,针对使用单个达林顿三极管对 电磁导航信号进行来复式放大检波,用于驱动微型电磁车模的方案进行了测试。不过当时,所使用的电磁导航信号还是使用的信号源制作的。现在实际利用比赛中正式信号源测试一下这个方案。
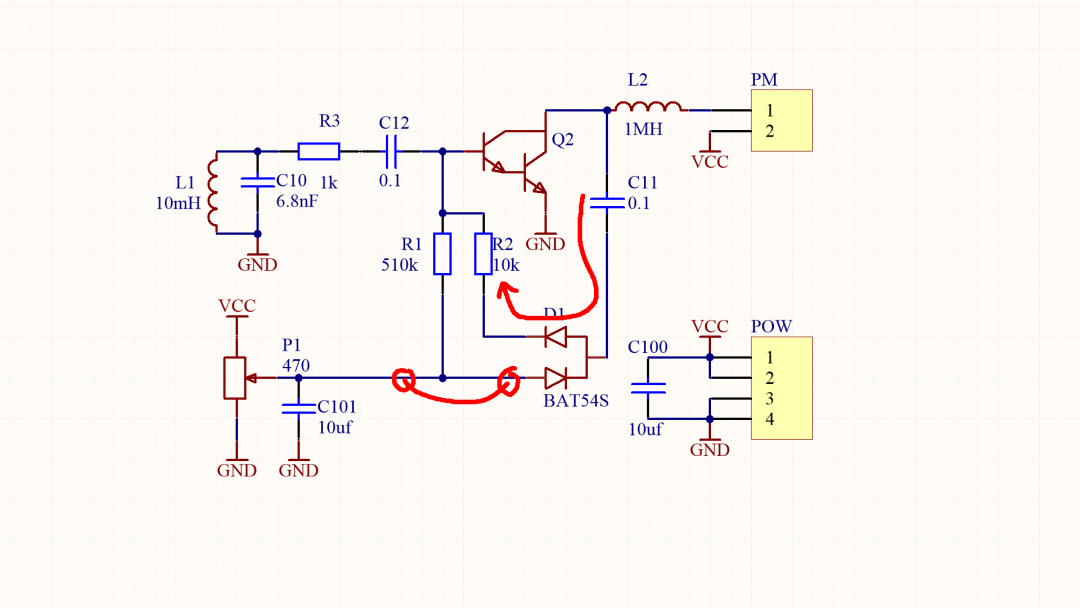
这是前两天设计的达林顿三极管来复式放大检波电路。其中存在的问题就是 达林顿三极管基极偏置电压有 1.2V。这就使得放大后的信号进行倍压检波的电压存在一个死区,只有当倍压检波输出电压超过1.2V 才能够推动三极管进一步放大直流信号。现在对电路进行了修改。将倍压检波二极管的下管不再连接地线,而是连接到达林顿三极管的基极偏置直流电压上。这样,就可以在信号比较小的时候,就能够提高达林顿三极管输出直流电流的大小。
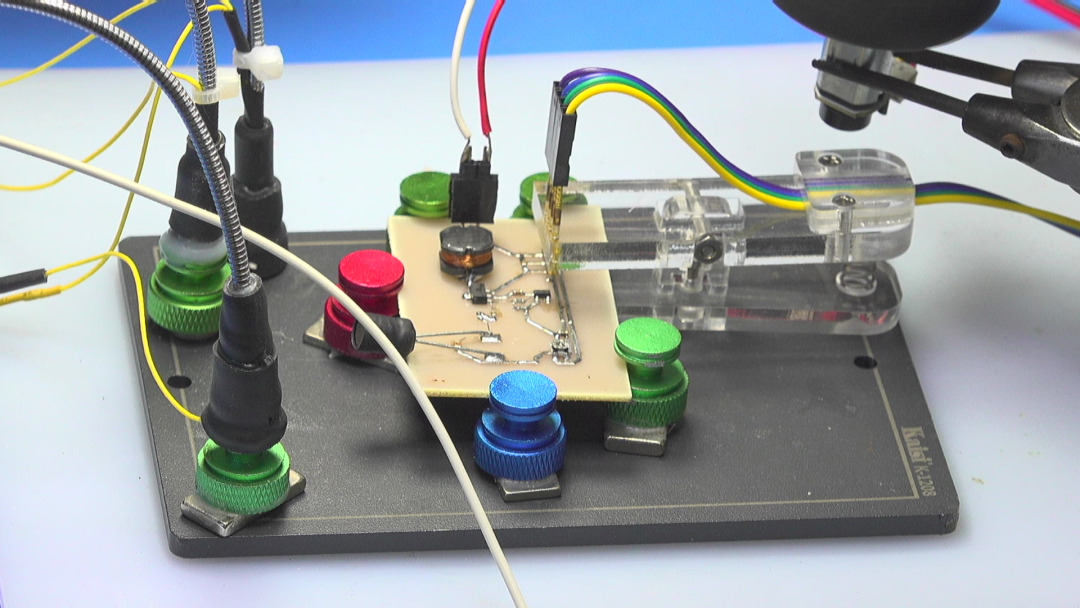
这是利用一分钟制板得到的测试电路板。根据电路图,焊接电路板,其中的倍压检波中的两个肖特基二极管使用了 BAT54s 器件。手中的白色电线中间通有 100mA 20kHz 的交变电流,靠近 10mH 接收电感 ,微型电机开始旋转。导航信号是由智能车竞赛中的电磁电源驱动的。这个模块是龙邱公司给我发送过来的模块。能够看到,随着电感与导线之间的距离变化,电机转速也随着发生变化。由此验证了,应用单个达林顿三极管的确可以完成信号的放大与电机驱动。现在所使用的电机是带有减速齿轮箱。这样可以获得更大的驱动扭矩。达林顿三极管的偏置是由电路板上的电位器设定,可以确定电路输出静态电流。使用三极管制作的驱动电路,虽然比起使用运放显得更加复杂,但是更能说明三极管信号放大检波的功能。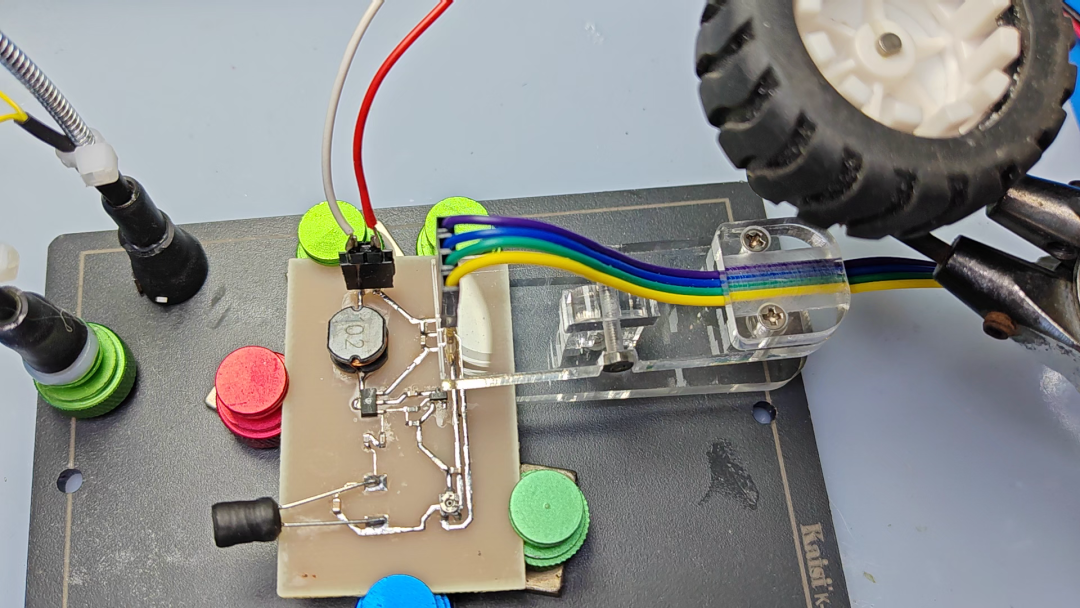
本文测试了达林顿三极管完成信号放大检波驱动的功能。只有达林顿三极管强度的增益,使得单管便可以完成从信号放大检波,到电机驱动的功能。说实在的,如果从电路的简介方面,还不如使用一个运放完成前端信号处理更加方便。

使用达林顿管实现来复式检波: https://zhuoqing.blog.csdn.net/article/details/143922583
[2]利用来复式检波实现单管驱动电机: https://zhuoqing.blog.csdn.net/article/details/143729339
