第二十届全国大学生智能汽车竞赛将于2025年暑期举行,竞速比赛规则 已于2024年11月公布。竞速比赛分为9个赛题组,其中“智能视觉组”具有较为复杂的机器视觉处理和模型车运动控制任务,因此专门针对智能视觉组继续比赛细则描述。比赛细则正式文档将会公布在全国大学生智能车竞赛网站(http://www.smartcarrace.com/)。
在智能汽车竞赛竞速比赛规则中对于智能视觉组比赛任务有了初步的描述。摘抄如下:
比赛场地兼容室内PVC赛道。智能视觉组需要在赛道上布置粘贴有图片的正方体箱子,车模在赛道的路径引导下完成立方体目标的发现,并要求对放在立方体上的图片或实物进行识别,将立方体按照图片或实物内容的“电子外设”和“常用工具”两个物品大类分别推离到赛道左右,同时也会考察0-99的手写体数字识别,如果图片的内容是手写数字,则需要按照数字的奇偶性分别推到赛道的左右(奇数推离左边,偶数推离右边),并对图片的小类识别或数字识别结果进行顺序记录,本次比赛完毕后通过小车自带屏幕按序号显示出来供裁判核对结果。
视觉组允许最多3人组队。
与室内赛道竞速组比赛环境类似,赛道采用PVC耐磨塑胶地板材料制作,材料与前几届室内竞速赛比赛相同。赛道规格、尺寸、形状、间距等与竞速组一致,比赛场地部署在室内无阳光直射的场地,地面保持基本平整。比赛场地外30cm左右距离可以设置高度30cm左右的围挡,以防止竞赛车模冲出赛场。
视觉组的基本比赛任务为:
(1) 使用福莱全向车模(Y)制作赛车,小车从起跑线前1米范围内出发沿赛道运行一周,再次通过起跑线后自动停止在起跑线后1米范围内;
(2) 赛道上还分布有外表粘贴有图案的立方体(粘贴于立方体上平面),立方体本身六面均为红色;
(3) 车模检测到立方体后,要求识别上面的图案种类并讲识别结果做好记录;
(4) 识别完成后需要小车将立方体按“电子外设”、“常用工具”大类分别推离到赛道左右,电子外设类推向左边,常用工具类推向右边;若立方体上是“手写数字体”,则奇数推向左边,偶数推向右边。箱子须完全推离赛道,立方体可能放赛道中央,也可能放在偏离中央的两侧,立方体尺寸为12cm×12cm×12cm;
(5) 完成一周运行后,需要按顺序将依次遇到的图片内容和手写体数字显示到小车自带显示屏上,供裁判判罚识别是否正确,不再要求小车设计复杂的机械结构对图片进行分类搬运。不允许增加机械臂推开箱子,只允许控制车体移动来推动箱子。
(6) 智能视觉组还将探索增强现实的手段应用到赛题中,但不影响参赛选手的前期制作准备和调试,区别在于用于被识别的图片是真实的图片还是增强现实叠加上去的图片,智能视觉组相关数据集将另行发布。
为方便同学们更清晰的理解,下面将从箱子的结构、图片内容以及推动要求详细描述视觉组的道具及任务。
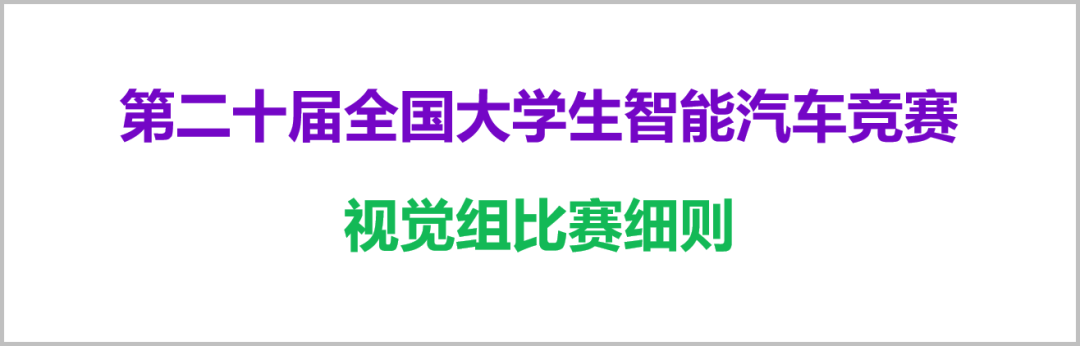
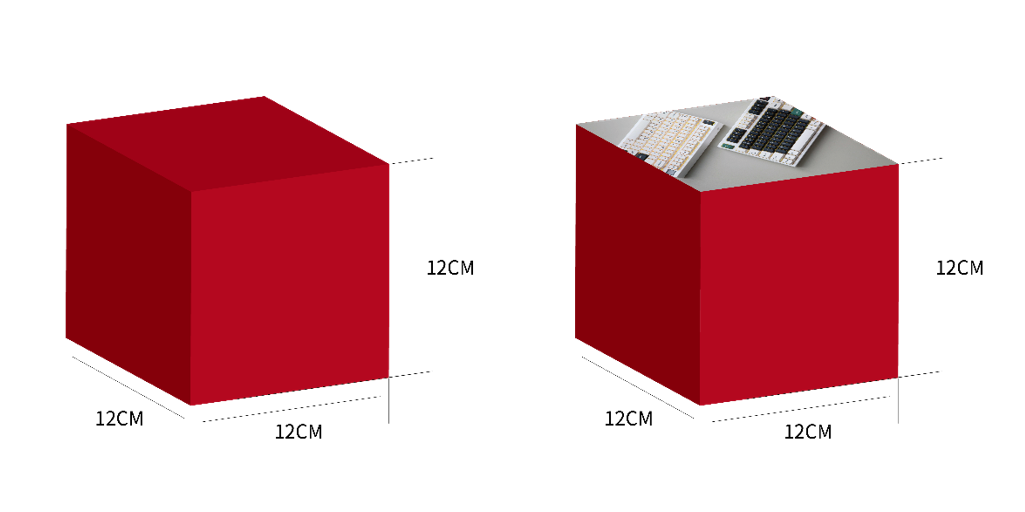
立方体是由纸箱制作而成的中空立方体,表面为红色。立方体为边长12cm的正方形,图片或实物以及手写数字放置在立方体正上方。
▲ 图2.1.1 立方体尺寸示意图及图片防止示意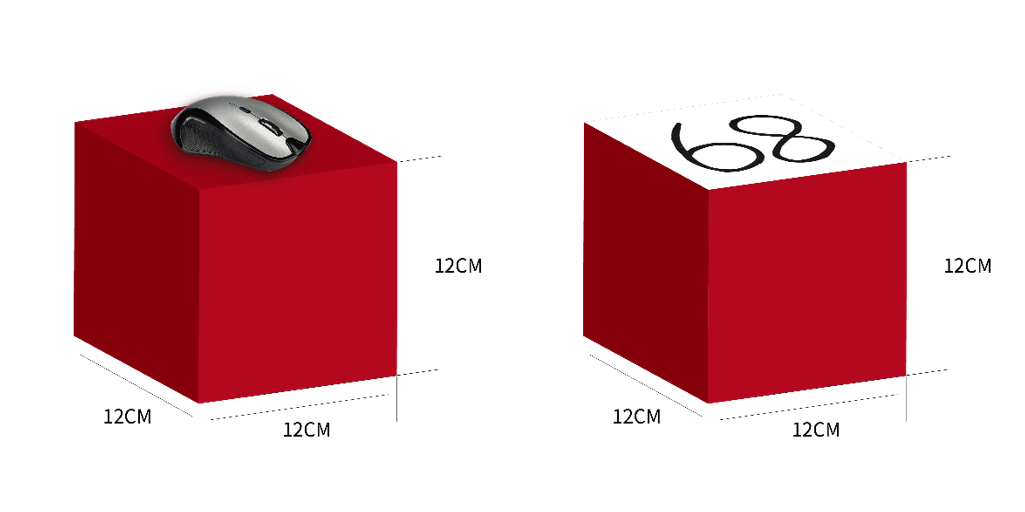
▲ 图2.1.2 立方体实物以及手写体防止示意图片目标为彩色打印或者喷涂有用于识别的图片,图片不再有黄色边框,均为无框图片,图片边长为12cm,如下所示。
▲ 图2.1.3 目标图片尺寸示意手写数字体组委会不统一发放数据集,比赛前由志愿者或者选手现场手写数字,用于比赛,边长为12cm,手写体数字范围是0-99,为区分6和9,可以在手写体6和9的下方加下划线。
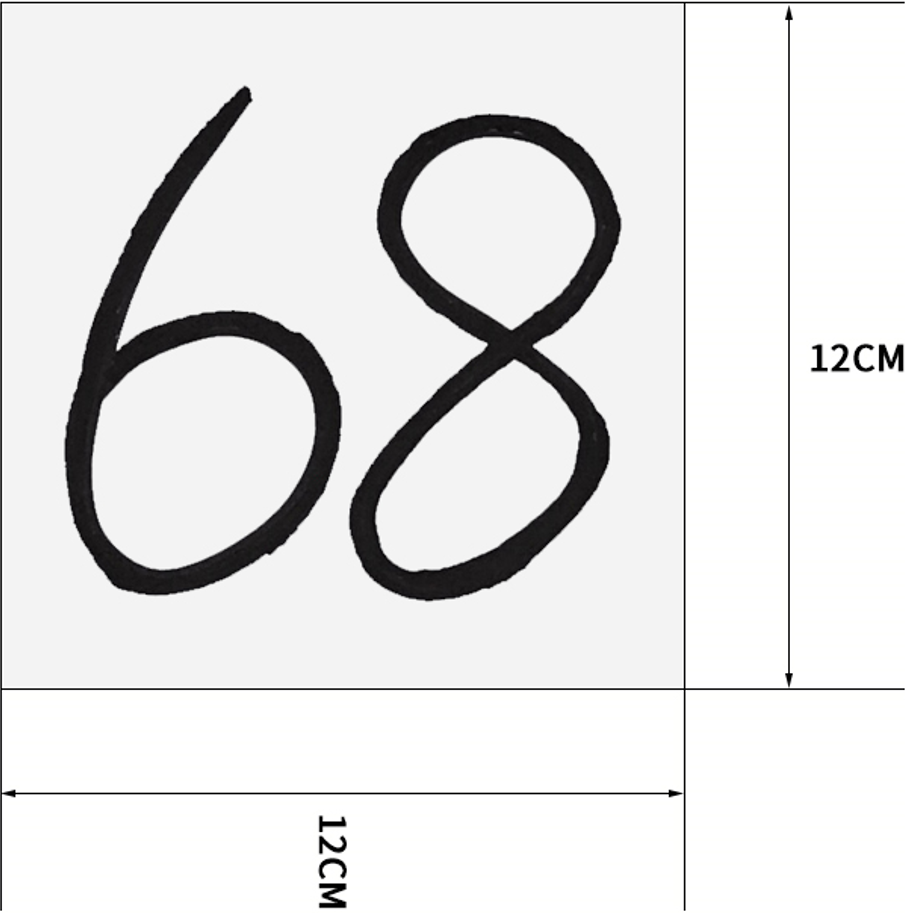
▲ 图2.1.4 手写体2位数字示意本届竞赛智能视觉组主题为工程师周边,分为“电子外设”和“常用工具”及“手写数字”三大类,每一大类又包括有若干小类,图片共15个小类(还可能出现未公布的小类),完整的目标图片数据集,竞赛组委会将会另行发布。

▲ 图2.2.1 数据集示意图如上文智能视觉组任务所述,赛场内存在两种摆放形式的立方体,一种是摆放在赛道中间任意位置,一种是摆放在赛道两旁(赛道内),小车从起跑线后出发后,沿赛道行驶并同步搜索立方体,发现立方体后,小车自行完成图片识别,并根据识别结果按要求推离至赛道两旁。如下动图所示:
▲ 图2.2.6 小车自动出发
▲ 图2.2.7 小车自动识别并将箱子按照要求推理赛道示意图
▲ 图2.2.8 小车按赛道引导回到起跑线自动停止1、 小车放置在赛道上斑马线后1米范围内出发,行进过程中可以任意出入赛道,无需严格循迹,但沿赛道行进会更方便的找齐所有箱子,箱子可能位于除起跑线前后50cm、十字路口、圆环出入口外的赛道上任意位置;
2、 小车上需自行配备有显示屏,每一圈比赛完成后需要按赛道引导方向顺序显示依次遇到的图片识别结果,并显示有序号,且显示内容需要和赛题里的小类名称一致。要求显示清晰可辨认,便于裁判阅读判罚,显示格式如下:
| 序号 | 内容 |
|---|---|
| 1 | 钳子 |
| 2 | 示波器 |
| 3 | 鼠标 |
| 4 | 68 |
| … | … |
3、 不允许小车只完成少量识别和箱子推离就直接回到起跑线的比赛方式,完成的比例由比赛现场情况进行确定,如果未达到完成比例则算比赛失败。高于或等于完成的比例则算完赛,遗漏和错误的箱子按罚时标准加罚。(分赛区和总决赛的完成率要求均由组委会现场确定)
4、 箱子和图片没有方向限制,不一定是正放,由现场裁判随机放置箱子的位置和图片的方向,基本要求是箱子之间的距离超过50cm,可以位于任意赛道元素上(除起跑线前后50cm、十字路口、圆环出入口外的赛道上任意位置)。
5、 需要注意的是,如果在推箱子的过程中,因为小车动作过度,误将计时器触发停止,则本次比赛直接结束,还未进行识别推离的箱子算作遗漏进行加罚;推箱子过程中,如果误将箱子再次推进赛道造成的重复识别导致记录顺错位影响由选手成绩需自行负责,裁判一律按摆放顺序对应的序号核对结果;
6、 罚时标准:搜索遗漏、推离失败、推离左右错误、小类识别错误均每个罚时30秒。
普通的PVC赛道铺设和竞速组一致,这里不再赘述,智能视觉组在比赛时需要裁判摆放立方体在赛道上,并且需要更换立方体上的图片。但今年的箱子摆放和图片更换比前几年的图片摆放都更加方便,裁判唯一需要记录的是裁判随机摆放的图片内容和顺序,以便于在小车完成一圈比赛后进行核对。整体摆放示意如下图所示:
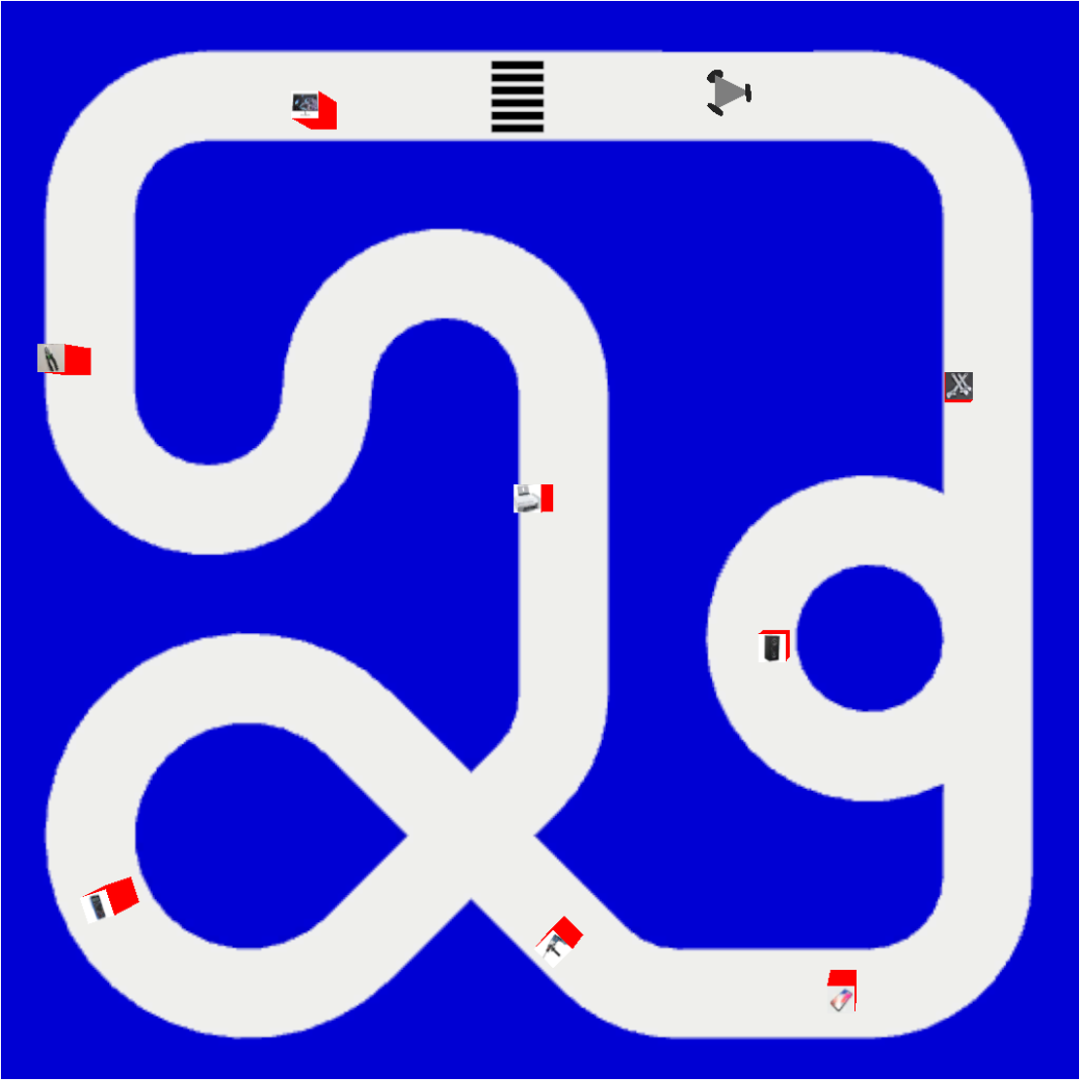
▲ 图4.1 赛道以及箱子摆放示意图组委会在比赛前会筹备虚拟现实、增强现实相关应用,若增强现实叠加图片信息相关技术和裁判系统改版速度能赶上比赛筹备进度,比赛的图片就不需要再人工摆放,直接通过增强现实技术叠加被识别图片信息在立方体上,这样就避免了不同队伍光线不一致对比赛的影响;也避免了人工摆放图片和记录图片以及判罚的人工参与,减少工作量,裁判系统自动实现将图片的虚拟数据叠加到摄像头看到的现实数据里;还增加了用于考察的图片数据集的丰富性,不再受图片打印的局限。但对于同学们的前期准备没有影响,同学们依然按照真实图片、实物、手写数字进行训练和调试。若最终验证下来没有较好的效果,将按照前面四章所描述的细则进行比赛。
