

传感器融合增强自主移动
机器人的导航能力和安全性
工业5.0背后的理念是人类与人工智能(AI)驱动的机器人一起工作,发展愿景则是这些机器人用于支持人类,而不是取代人类。自主移动机器人(AMR)可以提高生产效率、增强安全性,并为制造商节省大量成本。由于这些原因,AMR的采用将扩展到几乎所有行业。在此之前,AMR仍必须克服多项挑战,而克服这些挑战的关键之一,在于纳入各种传感器和新兴的传感器融合领域。本文将为您介绍传感器融合技术的发展,以及由安森美(onsemi)所推出的相关解决方案。

AMR应用前景看好但也面临挑战

AMR具有可减少成本、提升安全性、增加效率的应用特性,因此吸引着越来越多行业开始采用,依据调查显示,2022年全球AMR市场价值为86.5亿美元,预计2022年至2028年复合年增长率(CAGR)将为18.3%。虽然AMR的发展前景看好,但采用AMR也面临着诸多的挑战。
采用AMR的首要挑战是其运行的不同应用和环境的数量相当多样,常见的AMR的用途包括仓库、农业技术、商业景观、卫生保健、智慧零售、安全和监控、送货、存货,以及拣选和分类。在所有这些不同的环境中,AMR都有望在人员周围安全运行。
不过,由于应用情况的复杂性,也使得AMR的工作极具挑战性。作为人类,有些情况是我们视为理所当然,但AMR会难以应对的。例如,想象一个送货机器人在运送包裹的途中,看到路径中间有一个球,相信机器人可以毫无问题地识别出球,并避免撞击到球,但它是否足够聪明,能够预见到一个小孩子可能会跑出去捡球呢?诸如此类的复杂情况还有很多,像是AMR是否能够使用与识别安装在路边杆子上的90度反射镜,来观察拐角处的状况,并提前预测交通情况呢?AMR能够知道它不能在新浇筑的混凝土上行走吗?这些对人类来说是已经习以为常的事,但对AMR却带来了挑战。
也许这些人们容易理解的情况,对机器人来说更具挑战性。然而,如果使用了合适的传感器,AMR将可比人类更容易检测到明亮阳光下的物体。但浇筑的混凝土和溢出的液体则可能很难被识别,此外,像是边缘、悬崖、坡道和楼梯,对AMR来说都是挑战。还有一些特殊情况,比如遇到有人故意破坏AMR,这便又激发设计出逃生机动系统的需求。想要解决上述的许多挑战,则需要人工智能使用最先进的大型语言模型(LLM)和各种类型的高性能传感器。

适用于AMR的高性能传感器
各有其优缺点
AMR可使用不同类型的传感器来侦测环境的状况,这些传感器需要同时定位和建图(SLAM),并提供距离和深度测量。传感器的重要指标包括物体检测、物体识别、颜色识别、分辨率、功耗、尺寸、成本、范围、动态范围、速度,以及是否可以在各种照明和天气条件下运行。
可用于AMR的传感器模式包括CMOS成像、直接飞行时间(dToF)和间接飞行时间(iTOF)深度传感、超声波、雷达、感应定位、蓝牙®低功耗(蓝牙LE)技术、惯性等,每种传感器模式都各自有其优点和缺点。
例如,雷达在弱光或恶劣天气条件下可提供出色的范围和速度,但颜色检测能力较差、初始成本较高,且体积相对较大(这是AMR的一个重要考虑因素)。由于采用大批量的CMOS硅制造工艺,LiDAR的初始成本相对较低,并且在夜间/直射阳光下检测效果很好,但在物体分类方面较差。另一方面,iToF深度传感器具有出色的分辨率和低功耗处理能力。
显然地,仅使用单一传感器模式,将无法提供AMR应对上述所有挑战所需的所有信息。根据应用和环境,AMR将需要几种到多种传感器模式。这些传感器不会单独运行,而是会在称为传感器融合的过程中共同发挥作用。
自主移动机器人如何实现传感器融合
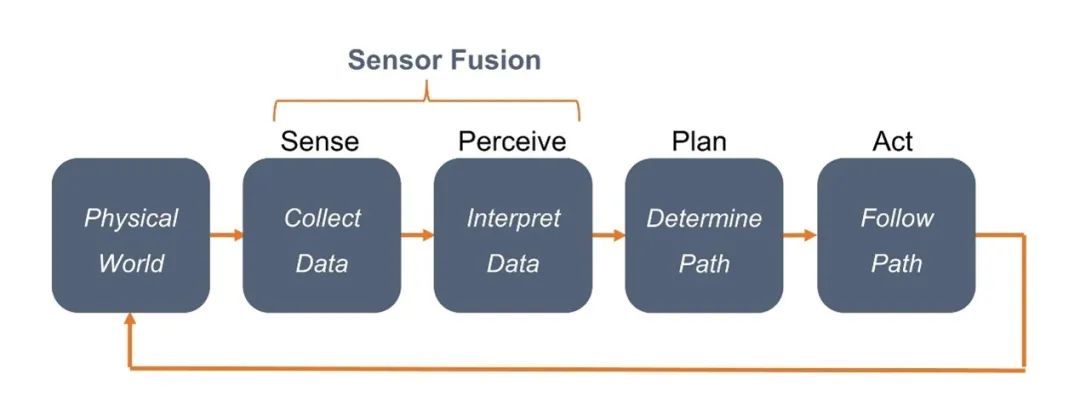
传感器融合是结合两个或多个数据源(来自传感器和/或算法或模型)的过程,以更好地了解系统及其周围环境。AMR中的传感器融合至关重要,因为它提供了更好的可靠性、冗余性和最终的安全性,并使评估结果更加一致、更加准确、更加可靠。
传感器融合结合了两种功能,包括数据收集和数据解释。传感器融合中的“解释数据”步骤需要实施算法或模型。有时传感器融合的结果是为人类生活习惯而设计的,比如作为汽车的辅助帮手,有时它们是为了机器应用的进一步需求而设计的,比如安全系统中的面部识别。
传感器融合具有多种优势,例如可减少信号噪声。通过同质传感器融合可以减少不相关噪声,而通过异构传感器融合可以减少相关噪声。由于其固有的性质,传感器融合通过冗余提高了可靠性。由于至少有两个传感器,如果一个传感器的数据丢失,侦测的质量就会降低,但由于还有其他传感器的数据仍然可用,使其不致于完全失灵。传感器融合还可用于估计未测量的状态,例如当物体或物体的一部分被相机遮挡住而看不到时,以及当物体或表面将光从一个相机反射到另一个相机时,传感器融合使侦测的性能仍具有一定的水平。
由于这些优势及市场的加速采用,传感器融合出现了一些趋势,包括可使用人工智能驱动的算法、增强的对象检测和分类,并可结合用于协作感知的传感器融合与多种传感器模式,以及在不利条件下的环境感知,借助传感器融合可实现360度环视,并可进行实时传感器校准等功能。
提供传感器融合的完整解决方案
AMR中的传感器融合旨在对工业和运输应用产生重大影响,在迈向工业5.0的过程中,安森美致力于提供传感器和子系统,以确保其能够有效实现。安森美的子系统解决方案也相当多样,从坚固耐用的高分辨率成像系统到大功率电机控制,再到高效紧凑的电池充电解决方案,都是利用数十年为汽车行业服务的经验构建的。安森美的解决方案能够共同确保开发工作变得更轻松,并使工业机器人具有足够的适应性和可靠性,能够在最恶劣的环境中行进。
自主移动机器人具有与自动驾驶汽车类似的功能,是由多个子系统组成的复杂设计,允许机器人以最少的人类交互安全地移动、观察和操作。安森美通过可靠的智能电源和传感解决方案最大限度地降低了这种复杂性,为您的设计提供了必要的构建模块。
传感器融合的核心是传感器,如果从传感器获得的数据不好,那么就算使用最好的算法也不会产生高质量的结果。幸运的是,安森美提供了一流的传感器和工具库来支持AMR中的传感器融合。
安森美在智能传感技术领域处于领先地位,安森美可提供各种卷帘快门和全局快门图像传感器的广泛产品组合,在动态范围和运动唤醒等创新功能方面具有行业领先的性能,可满足从可穿戴设备和消费电子产品,到要求苛刻的工业和汽车应用的各种可能的最终应用的要求。
除了图像传感器之外,安森美还提供用于距离检测(LiDAR)的SiPM。该产品组合包括超声波传感器、电感式传感器和支持蓝牙®LE技术的微控制器,支持AoA(到达角)和AoD(出发角),可用于定位。
在此特别介绍NCV75215这款用于超声波停车距离测量应用标准产品(ASSP),其可与压电超声波传感器一起运行,以在车辆/AMR停车期间提供障碍物距离的飞行时间测量,其具备高灵敏度、低噪声操作,允许对标准的75 mm杆进行0.25 m至4.5 m的检测,实际的最小距离由混响的长度决定。在理想条件下,通过完美调谐和匹配的外部电路,可实现0.2 m的最小距离,实际检测范围取决于压电超声波换能器和外部模拟零件。
此器件通过变压器以可编程频率驱动超声波换能器,接收到的回波被放大并转换为数字信号,经过滤波、侦测,并将振幅与存储在内部RAM中的时间相关阈值进行比较,到障碍物的距离则由从传输突发到回声识别的时间来决定。内置的双向I/O线路可用于与主站(ECU)通信,主设备向NCV75215发出I/O线路命令,并通过同一线路报告资料。
结语
自主移动机器人有很多用例,而且它们的采用正在加速,已经出现了一系列最佳实践来支持这种快速采用。首先,必须控制环境以减少AMR可能遇到的潜在碰撞。在制造或仓库设施中为AMR/自动导引车(AGV)指定路程就是这样一个例子。其次,在开发过程中使用数字孪生来模拟确切的用例(包括极端情况)非常重要。最后,将传感器融合与智能传感器、算法和模型结合起来至关重要。安森美能够提供传感器融合的完整解决方案,包含结合图像传感器的高分辨率成像系统到大功率电机控制,再到高效紧凑的电池充电解决方案,能够满足AMR应用的各种需求,若有相关需求,请与艾睿电子或安森美联系,以进一步取得相关的产品与应用信息。


关注
艾睿电子


前往艾睿电子国际商城 | 加入MyArrow获取专属报价
