在当今科技飞速发展的时代,全球竞争日益激烈,科技实力成为国家综合国力的关键体现。自动驾驶技术作为前沿科技领域,对于国家发展有着重要意义。
渡众自动驾驶车车对抗赛,旨在激发科技人才的创新热情和爱国情怀。通过这样的比赛,鼓励科研人员和学生投身于人工智能、机器人、自动化、计算机、汽车等相关专业的人才培养方案、课程体系、实验实训条件等方面的建设,提升我国在该领域的技术水平,增强科技竞争力。同时,比赛也将培养出更多掌握先进技术的人才,为国家发展储备力量,用科技捍卫国家尊严,为民族复兴助力。
本次竞赛秉持 “以赛促教”“以赛促学” 的理念。对于教育者而言,竞赛促使教师不断更新教学内容和方法,将前沿技术融入教学,提高教学质量。对于学生和参赛者,这是检验和提升自身能力的绝佳平台,激发他们主动学习新知识、探索新领域,培养实践能力和创新思维。
本次竞赛,参赛团队成员,需要掌握C++/Python、图像动态瞄准、人工智能、ROS、嵌入式系统、自动控制、通信等相关技术知识。相关前置课程知识可登录渡众机器人开发者社区(https://www.bjdzrobot.com/smartcar.html)课程中心获取。
1、 本赛项面向全国全日制在校研究生、本科生和职业院校学生。
2、 本赛项为团体赛形式,每支参赛队由不超过5名学生(其中最多1名研究生)和不超过2名指导教师组成。
3、 所有参赛队必须以学校为单位进行报名,不得跨校组队。比赛分本科和职业院校两个组别,报名时须明确参加的组别。
4、 所有参赛队选手所提供的个人信息必须真实、准确、有效,否则取消参赛资格,参赛队伍报名成功后,不得调整和更换参赛队员。
比赛分为两个阶段:分区赛和国赛阶段。分区赛采用单循环小组赛赛制,国赛阶段采用淘汰赛制。
以32支队伍为例说明。
A第一轮(十六强赛,BO3)
B第二轮(八强赛,BO3)
C第三轮(四强赛,BO3)
D第四轮(半决赛,BO3)
E第五轮(决赛,BO3)
本次比赛是红蓝双方智能车在规定场地上的攻防对抗类比赛。红蓝双方全自动驾驶小车通过完成穿越障碍、物资抢占、动态打靶、相互攻击等任务,制定自己的战术和策略,得分多的一方获胜。双方小车可以通过云台上的激光发射器和车身前后左右的激光接收靶进行攻击与防御。
A. 物理环境比赛场地
本次比赛场地为 3.5×5 米的城市场景,呈对角线对称的长方形场地,中间有 4 块 40×15 厘米的隔离带掩体将场地左右平分。红蓝双方每块区域为四横三纵的单车道道路,每侧都有 5 块物资识别区域与一块基地区域,其中数字1、2、3…20是可能放置物资的位置编号。单车道宽 25 厘米,营造出较为真实的对战环境,为参赛选手的智能汽车提供了具有挑战性的行驶空间。
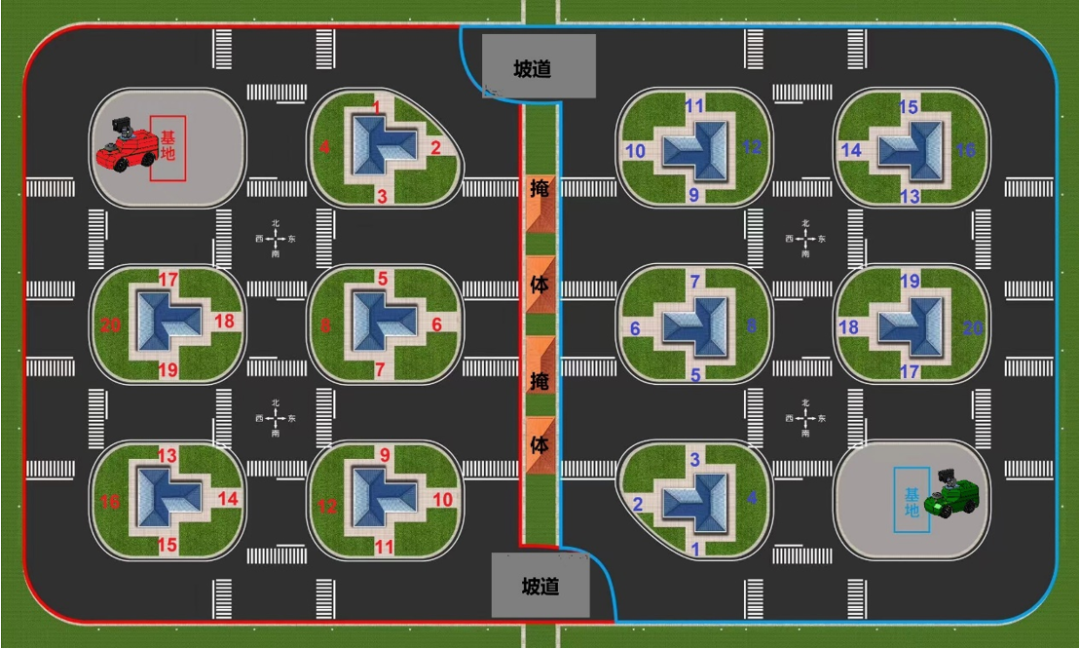
▲ 图3.2.1 比赛场地示意图B. 赛场环境
智能机器人比赛场地为无磁场干扰环境。地图由刀刮布绘制而成。考虑到竞赛场地环境可能存在表面不平整、边框上有裂缝、光照条件有变化等因素,各参赛队在设计智能机器人时,需要考虑各种环境下的应对措施。
C. 物资位置
双方场地标有数字1、2、3…20是可能放置物资的位置编号。
3.2.2 比赛用车模
在分赛区选拔赛及全国总决赛,将采用如下所示的DZACS智能小车作为对抗车模。
DZACS智能小车套件产品外观:

▲ 图3.2.2 渡众DZACS智能小车外观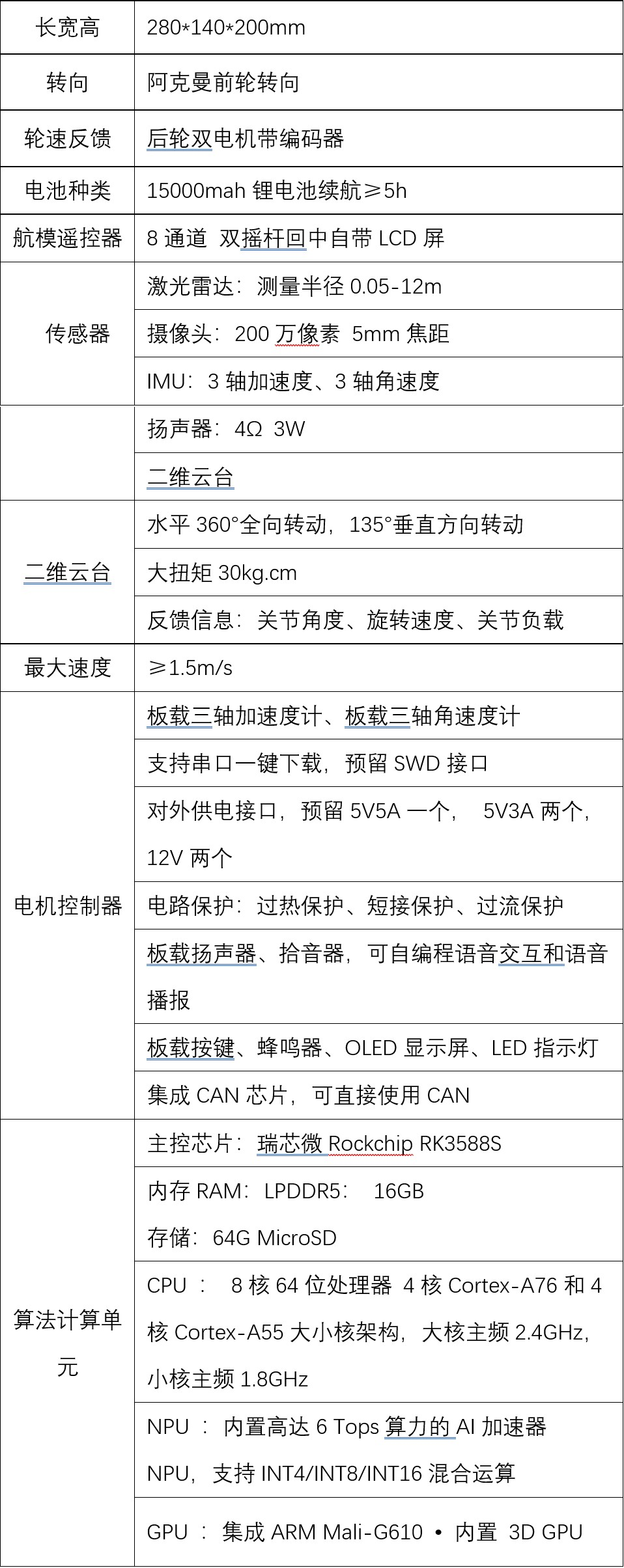
1. 随机抽取物资编号:参赛队伍将各自的智能车放置在基地位置,裁判系统现场随机生成红蓝方对称位置的各4个物资编号,参赛队员在熟悉场地前提下,根据物资编号自行规划动态全局导航路径。以及如何打击对方的路径以及抢占对方物资的路径。此过程将在大屏幕上实时显示,确保公平公正。
2. 两分钟准备:双方队伍有 2 分钟的调试时间,在此期间可以检查车辆的各项性能,调整算法参数,进行路径规划的预演等。
(1)当比赛时间达到 3 分钟时,比赛结束。
(2)如果一方把对方的血条全部打掉,则该方获胜;如果时间到双方都未打掉对方全部血条,则以得分算输赢。
(3)平局:在比赛过程中,如果出现平局的情况,即双方得分相同,则需要加时2分钟,加时阶段,双方血量恢复,且各有20发子弹;
裁判系统分为车端和裁判端,旨在精确、公平地评判比赛过程中的各种行为和状态,保障比赛的顺利进行。车端裁判系统位于车后端且自带 WiFi,与裁判端协同工作,确保比赛信息的准确采集和处理。
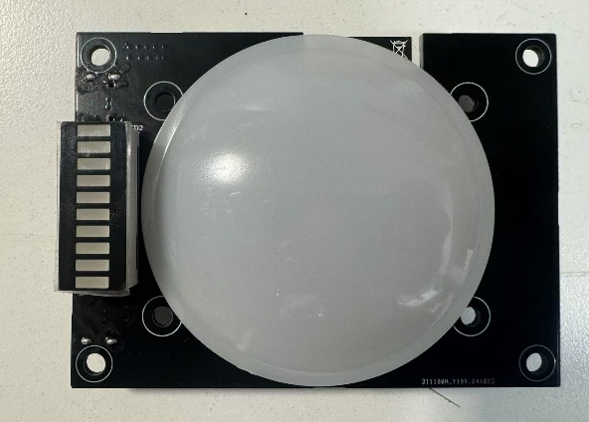
▲ 图3.4.1 车载裁判系统正面1、动态全局路径规划支持
2、调试监督
3、物资抢占判定
4、车车对打监控
5、动态打靶判定
6、信息展示
车载靶子模块有明显的灯光效果供机器人自动识别瞄准算法的开发。
比赛过程中,参赛队按照裁判员指令依次上场。每场比赛仅允许两支参赛队的2台车模竞赛,同时只允许双方各三名队员上场。上场后即进入比赛2分钟准备阶段。车模初始是遥控模式,根据裁判员发出“倒计时3、2、1,发车”口令后,裁判通过航模切换到自动驾驶模式从而起动车模。
赛场内会提前安装用来运行数字环境的计算机平台和用于展示的显示器,参赛队在发车指令前需要提前在提供的2分钟内准备计算机平台与车模的通讯连接、加载车模软件和计算机平台软件。
1、 各参赛队对车模的编程与调试只能在调试区进行,调试区可提供部分赛段供车模测试。不能在比赛场地进行调试。
2、 参赛队员在检录后才能进入比赛准备区。裁判员对参赛队的车模及备品备件工具进行检查,所用器材必须符合组委会相关规定与要求。
3、 参赛队员在比赛准备区,不得上网下载任何资料;比赛期间禁止手机联网车模。每支参赛队仅允3名参赛队员到达比赛场地,其他队员留在准备区。
4、 在两轮比赛间隔期间,参赛队可以将车模带回调试区进行维修和修改程序,下一轮比赛时,仍按原定比赛编号上场比赛。
5、 竞赛过程要求
(1) 发车手(参赛队员A、B)准备
根据裁判员的口令,参赛队选出参赛队员A领取自己的车模,不得对其他参赛队的车模进行故意碰撞或损坏。参赛队员A、B在引导员指引下进入比赛场地,未在5分钟规定时间内到场的参赛队视为弃权。
(2) 比赛开始
裁判员确认参赛队参赛队员A准备好后,将发出“3,2,1,开始”的倒计时口令。参赛队员A应在开始口令发出后,起动车模。
(3) 车模重新起动
车模如因车速过快冲出场地或车辆不受控制。可由参赛队员A提出重新启动;
每支参赛队单场比赛最多允许启动三次;
重新启动指参赛队员A向裁判员提出请求,裁判员同意后,参赛队员A将车模重新放置在发车区起动。
每重新启动一次,扣3分。
(4) 车模到达指定区域
车模到达指定区域的标准:车模至少3个轮子在指定区域内(含压线)停住,视为到达指定区域。车模冲过指定区域未能及时停住,视为未能到达指定区域。
单场比赛总限时为5分钟,计时完毕后,将直接终止单场比赛,统计比分。裁判员吹哨示意比赛结束后,参赛队员A应立即让车辆停止,将车模交回检录区,等待确认比赛积分结果。裁判员和助理裁判员将单场比赛计分统计表交给参赛队确认,参赛队应当场确认签字,如有争议应提请裁判长仲裁。参赛队员签字确认成绩后,可将车模搬回调试区进行维修或修改程序。
(1) 参赛队使用的车模需要粘贴裁判组发放的统一参赛号标签,参赛前要放在指定检录区进行核验。整个比赛过程中,不允许更换不同的车模参加比赛(除硬件。故障外)
(2) 车模按裁判员指令进行发车启动,不得抢跑。第1次误启动将受到裁判员的警告,车模回到启动区重新等待启动。第2次误启动将被取消比赛资格。
(3) 车模不得高速冲撞场地,如发生上述失控情况,第1次将受到裁判员警告,第2次将被取消比赛资格。
(4) 车模不得故意冲撞对方车辆,如导致对方车辆不可正常导航,积分算排名,取消比赛资格。
(5) 如果有参赛队员或者其使用的车模造成比赛模型损坏,不管有意还是无意,将警告一次。该场该任务不得分,即使该任务已完成。
(6) 不听从裁判员的指令将被取消比赛资格。
本次赛事相关培训资料、规则解读等在渡众机器人智能汽车竞赛专区(https://www.bjdzrobot.com/smartcar.html)持续更新。本赛事最终解释权归组委会所有。
赛事报名、规则补充及后续通知,请关注TsinghuaJoking公众号(卓晴老师)、北京渡众机器人公众号、竞赛QQ群消息等。
□ 报名咨询