影响RTOS实时性的因素主要包括任务调度延迟、中断处理延迟、系统负载、任务优先级反转、时钟精度、内存管理等。
1
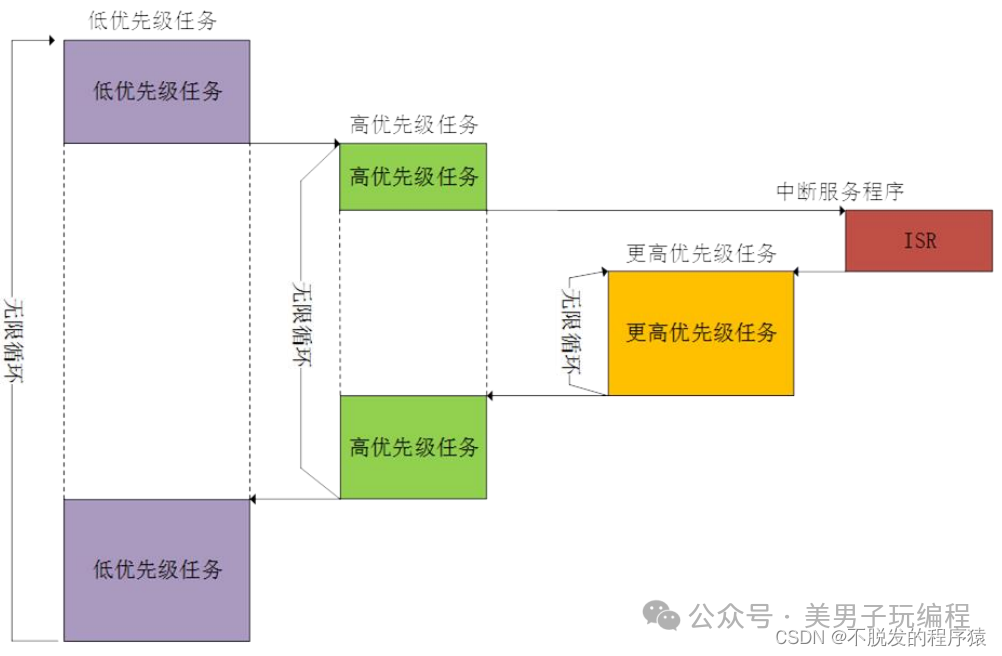
任务调度延迟
任务调度器是RTOS的核心,当一个高优先级任务准备就绪时,调度器需要及时切换到该任务。
调度延迟是指从高优先级任务就绪到开始执行的时间。
调度器算法(如时间片轮转、优先级调度)对调度延迟有很大影响。
使用FreeRTOS中的任务优先级来示例调度的影响,例子中,vTask2的优先级更高,因此每次调度时RTOS都会优先执行它,体现了任务调度对实时性的影响。
void vTask1(void *pvParameters) {for (;;) {// Task 1 has a lower priorityprintf("Task 1 running\n");vTaskDelay(500 / portTICK_PERIOD_MS); // Simulate some work}}void vTask2(void *pvParameters) {for (;;) {// Task 2 has a higher priorityprintf("Task 2 running\n");vTaskDelay(500 / portTICK_PERIOD_MS); // Simulate some work}}int main(void) {// Create tasks with different prioritiesxTaskCreate(vTask1, "Task 1", 1000, NULL, 1, NULL);xTaskCreate(vTask2, "Task 2", 1000, NULL, 2, NULL); // Higher priorityvTaskStartScheduler(); // Start the schedulerfor (;;) {}}
2
中断处理延迟
中断处理是RTOS实时性的重要因素。
系统需要能够快速响应中断,但过多的中断可能导致高优先级任务延迟执行。
因此,中断服务程序(ISR)的设计应尽量短小,避免耗时的操作放在ISR中。
ISR通过vTaskNotifyGiveFromISR将处理任务交给高优先级任务,确保ISR本身尽量短,从而减少中断对实时性的影响。
void vShortISR(void) {BaseType_t xHigherPriorityTaskWoken = pdFALSE;// Notify a task that an interrupt has occurred (short ISR)vTaskNotifyGiveFromISR(xTaskHandle, &xHigherPriorityTaskWoken);// Perform context switch if necessaryportYIELD_FROM_ISR(xHigherPriorityTaskWoken);}
3
系统负载
如果系统负载过高,任务和中断处理可能会被推迟。
合理的负载分配和资源使用可以提高实时性,确保高优先级任务和中断能够及时响应。
在高负载任务运行期间,系统可能难以及时响应其他任务。
可通过vTaskDelay()等函数将任务划分为多个小段,避免单个任务占用过多时间。
void vHeavyTask(void *pvParameters) {while(1) {// Simulate heavy computationfor (int i = 0; i < 1000000; i++) {// Do some heavy work}printf("Heavy task completed\n");}}
4
任务优先级反转
优先级反转发生在低优先级任务持有资源而高优先级任务需要该资源的情况,导致高优先级任务被阻塞。
通过使用优先级继承机制,RTOS可以暂时提升低优先级任务的优先级,解决优先级反转问题。
例子中,优先级反转可能发生,RTOS可以通过优先级继承机制暂时提升低优先级任务的优先级,解决这个问题。
SemaphoreHandle_t xMutex;void vLowPriorityTask(void *pvParameters) {// Low-priority task acquires the mutexxSemaphoreTake(xMutex, portMAX_DELAY);printf("Low-priority task holding mutex\n");vTaskDelay(1000 / portTICK_PERIOD_MS); // Simulate some workxSemaphoreGive(xMutex);}void vHighPriorityTask(void *pvParameters) {// High-priority task tries to take the mutexxSemaphoreTake(xMutex, portMAX_DELAY);printf("High-priority task acquired mutex\n");xSemaphoreGive(xMutex);}int main(void) {xMutex = xSemaphoreCreateMutex();// Create tasks with different prioritiesxTaskCreate(vLowPriorityTask, "Low", 1000, NULL, 1, NULL);xTaskCreate(vHighPriorityTask, "High", 1000, NULL, 2, NULL);vTaskStartScheduler();for (;;) {}}
5
时钟精度
时钟是实时操作系统的基础,所有定时相关的操作依赖时钟。
时钟的精度和抖动会直接影响任务的准确性,特别是在定时器任务和延迟任务的场景下。
例子中,确保任务每100毫秒精确执行一次,如果时钟不够精确或存在抖动,任务的执行时间间隔将会受到影响。
void vTask(void *pvParameters) {TickType_t xLastWakeTime;const TickType_t xFrequency = 100; // 100 msxLastWakeTime = xTaskGetTickCount();for (;;) {// Wait for the next cyclevTaskDelayUntil(&xLastWakeTime, xFrequency);printf("Task running at precise intervals\n");}}
6
内存管理
实时系统的内存管理需要高效且可控。动态内存分配(如malloc())可能导致内存碎片化,降低系统性能。
为避免内存管理对实时性造成负面影响,通常建议使用静态内存分配。
例子中,使用静态内存分配来避免动态分配带来的内存碎片问题,从而提高实时性。
static StackType_t xStackBuffer[1000];static StaticTask_t xTaskBuffer;void vStaticTask(void *pvParameters) {for (;;) {printf("Static task running\n");vTaskDelay(1000 / portTICK_PERIOD_MS);}}int main(void) {// Create a task with statically allocated memoryxTaskCreateStatic(vStaticTask, "StaticTask", 1000, NULL, 1, xStackBuffer, &xTaskBuffer);vTaskStartScheduler();for (;;) {}}
通过合理的设计和优化,可以有效提升RTOS的实时性能,确保系统能够及时响应任务和中断。