 芝能汽车出品
芝能汽车出品
特斯拉最近发布了即将推出的无线电动汽车充电站的详细信息,这一充电站在之前的 Robotaxi 发布会上已经亮相。特斯拉过去对无线充电的兴趣不大,但现在随着 Robotaxi 的推出,显然已经改变了策略。
电动汽车依赖于传统的有线传导充电方式,而无线充电技术(Wireless Power Transfer, WPT)为这一问题提供了全新的解决方案。
通过无线充电技术,电动汽车能够摆脱电缆束缚,实现更便捷的能量补给,这一次我们可能找到了无线充电的方案。

Part 1
无线充电技术基础
无线充电技术的发展,电动汽车无线充电系统逐渐被推向市场,无线充电系统由地面发射端和车载接收端组成,通过非接触式耦合传输能量。
地面端将电网的工频交流电转换为高频交流电,并通过地面发射线圈与车载接收线圈之间的磁场耦合作用,将能量传递到车载接收端,再通过电能转换装置将电能传输到电池。
无线充电不仅消除了电缆连接的繁琐,还可以通过无线通信方式(如WiFi、蓝牙)实现地面端与车载端的智能交互。根据不同的能量传输方式,无线充电技术可以分为近距离无线充电和远距离无线充电。
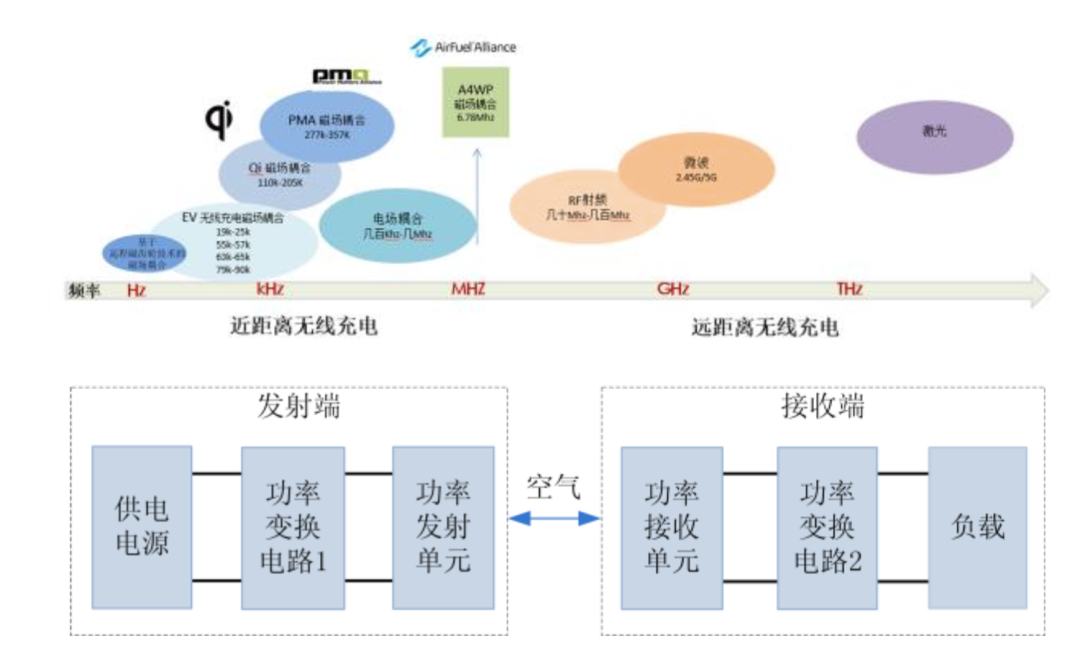
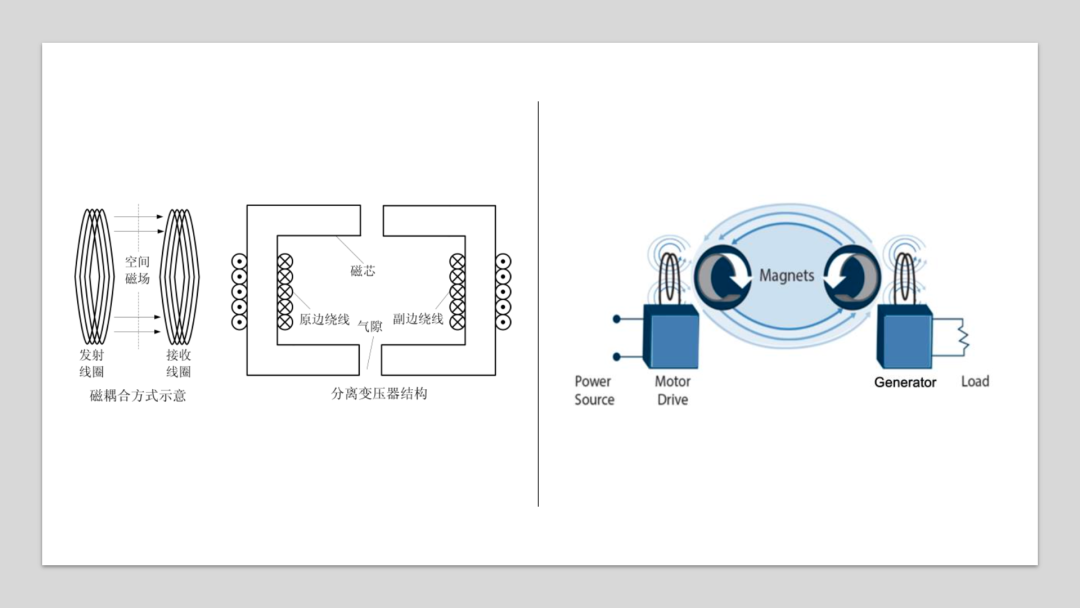
● 磁场耦合式无线充电:磁场耦合是目前电动汽车无线充电的主流技术。
其工作原理类似于变压器,通过发射线圈与接收线圈之间的磁场谐振实现能量传输。磁场耦合式充电技术的传输距离通常在几厘米至几十厘米之间,效率较高。
近年来,基于磁齿轮的无线充电技术也有所发展,通过电机驱动磁体运动,实现较低频率下的能量传输。
● 电场耦合式无线充电:电场耦合通过两个分离的极板形成电容,传递电能。
尽管电场耦合具有实现高频率和高效能量传输的潜力,但由于空气的介电常数较小,极板尺寸和传输距离的限制使其在电动汽车领域的应用较少。
远距离无线充电利用射频、微波或激光传输电能,理论上可以实现数米甚至更远的充电距离,微波方式通过定向天线传输能量,可实现一对多设备同时充电,远距离无线充电在能量传输效率和安全性方面仍面临巨大挑战,尚未大规模商业应用。
电动汽车无线充电系统的主要优势在于其便利性和自动化潜力,特别是在公共交通和共享车辆领域,车辆可以通过驻车或行驶时的地面感应装置进行自动充电,省去了人工插拔电缆的操作,现在我们找到了L4级别自动驾驶电动汽车的补能方式。
无线充电的主要优势在于简化了充电过程。尽管给汽车充电并不是特别困难或耗时的任务,但特斯拉认为,随着自动驾驶技术的发展,无线充电将变得更加重要。
如果汽车可以自动驾驶,那么 Robotaxi 回来以后,能够自行充电而无需人工干预将是非常方便的,早期的无线充电技术效率较低,但最新的解决方案,如磁共振充电,已经能达到与有线充电相当的效率,大约为95%。
特斯拉新视频展示了无线充电板的工作情况,充电速率达到25千瓦,这个速度不如特斯拉超级充电网络的直流快速充电,但已经超过了典型的交流充电。

Part 2
电动汽车无线充电的系统构成
电动汽车无线充电系统通常采用磁耦合的方式,其主要包括地面发射端和车载接收端。
● 地面端负责将工频交流电转换为高频交流电,再通过发射线圈生成磁场,
● 车载端通过接收线圈将磁场能量还原为电能并传输至电池。
无线充电系统的设计需要考虑多个因素,如功率传输效率、传输距离、安全性及电磁环境等。为了提高系统的可靠性,无线充电系统还需具备异物检测、活物检测、引导对齐等辅助功能。这些技术确保了充电过程的高效、安全。
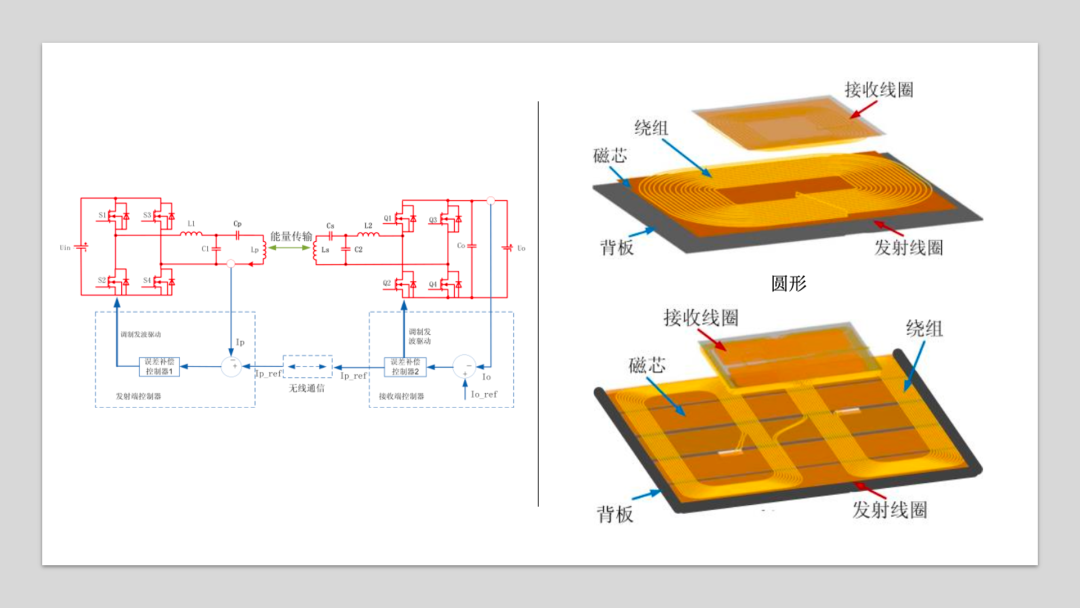
实现高效、安全的电能传输是电动汽车无线充电技术的核心。在功率变换电路中,高频逆变和高频整流技术是关键,直接影响系统的整体充电效率。
未来,新型电力电子器件(如SiC、GaN等宽禁带半导体材料)的应用有望进一步提升系统的能量转换效率和传输功率。系统的控制技术也是无线充电的核心之一。
频率跟踪、阻抗匹配及功率控制技术的优化能够确保系统在不同环境下的稳定运行。
随着自动驾驶技术的发展,无线充电系统还需与智能泊车系统相结合,以实现车辆的自动对齐和精准充电。
无线充电技术仍面临能量传输效率、设备互操作性和安全性等方面的挑战。未来,技术的发展方向主要集中在以下几个方面:
● 提高能量传输效率:通过改进磁耦合设计和采用新型半导体器件,这块问题不大。
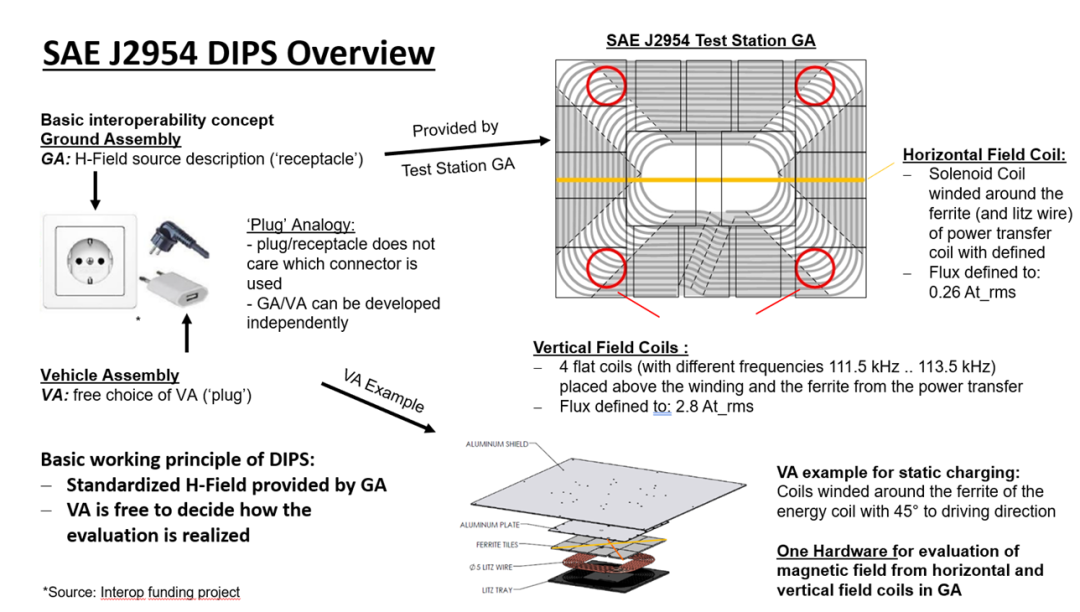
● 标准化:统一的技术标准和协议将有助于实现不同设备间的兼容性,推动无线充电技术的大规模推广,这块问题也不大。
● 安全性与电磁辐射:未来的无线充电系统需进一步优化电磁兼容设计,确保其对周围环境和人体的安全。
当然现在最大的可能可能需要对齐和引导,找到位置才能好的处理。
通过车载摄像头和传感器采集周围环境的图像数据和距离数据,然后实时规划泊车路径并开始泊车。
在泊车过程中,系统实时计算发射线圈和接收线圈之间的位置偏移矢量,并将该位置偏移矢量发送给电动汽车。
电动汽车接收到位置偏移矢量后会暂停泊车。当接收到的位置偏移矢量在预设的时间内不发生变化时,系统重新规划泊车线路并继续泊车。
当车辆到达目标位置后,再次暂停泊车,并判断泊车位置是否满足无线充电需求。
通过在泊车过程中根据发射线圈和接收线圈之间的位置偏移矢量暂停和重新启动泊车。
小结
特斯拉的L4 级别的车辆对无线充电技术看来是比较刚需的。
