前两天,看到太原理工大学的这位小姐姐,使用她制作的缩微电磁车模进行比赛的视频。其中的车模不仅小巧玲珑,运行轻快稳定,而且在赛道上能够完成弯道、 十字路口等赛道的运行。很多同学不仅好奇,这位小姐姐手中的车模究竟是如何制作的?
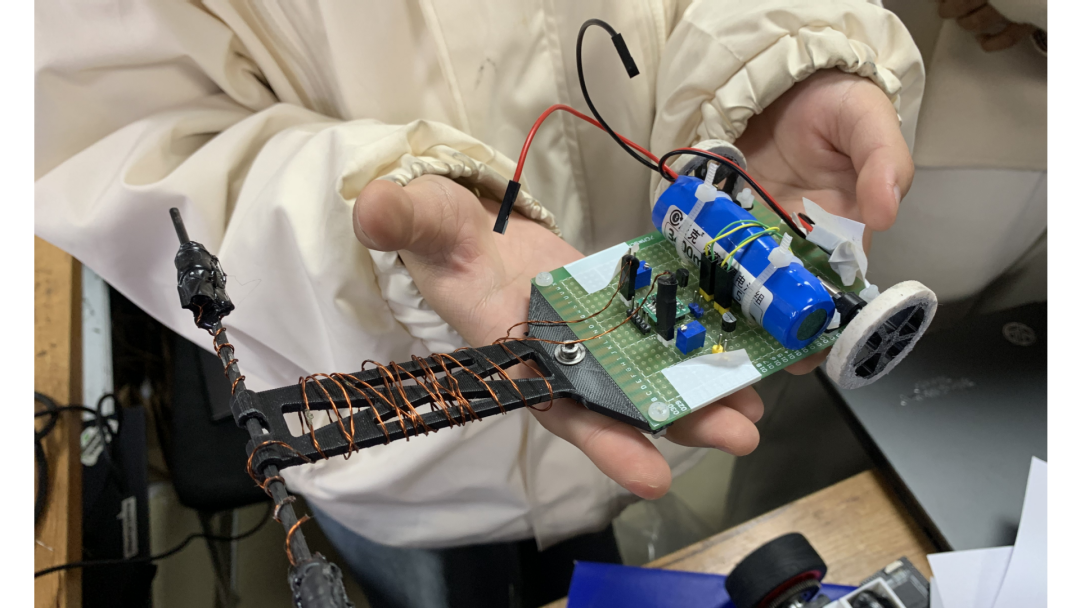
当看到她手中的车模,大家就会发现,这个车模的控制,实际上只是包含有一些运放和三极管。并没有使用可编程单片机进行控制。在这个太原理工大学智能车基地的培训资料中,给出了车模制作的电路原理。同学们就是根据这个手册来完成车模硬件电路设计,并且通过调试,能够完成赛道的比赛。下面给大家介绍一下这个指导手册中给出的设计原理。
如果要维持这个后轮双驱微型车模运行在赛道的中心,需要能够有某种控制机制,来纠正车模运行过程中的位置偏差。在赛道中间,铺设有导引电线。电线里面通有 20kHz 的交变电流。车模两个后轮转动不仅可以驱动车模前进。而且根据两者之间的差速可以改变车模的转向。在赛道中心的电磁线周围,分布着中心大,两边小的交变磁场。车模前端的横梁上包含有两个工字型的电感,可以感应到磁场的大小。
如果车模正好处在赛道中央,两个电感左右关于电磁线对称,两个电感输出的信号幅度相同。如果车模偏向了一边,这样两个电感输出的交变信号就会有高有低。如果使用左右两个信号的高低分别控制对称一边的电机转速,这样便可以形成一个自动调整方向的控制机制。比如车模偏左,右边的电感输出信号偏大,使用它控制左边电机转速增加,这样车模便会自动往右转动,直到车模重新回到赛道中间。这就是控制的基本原理。
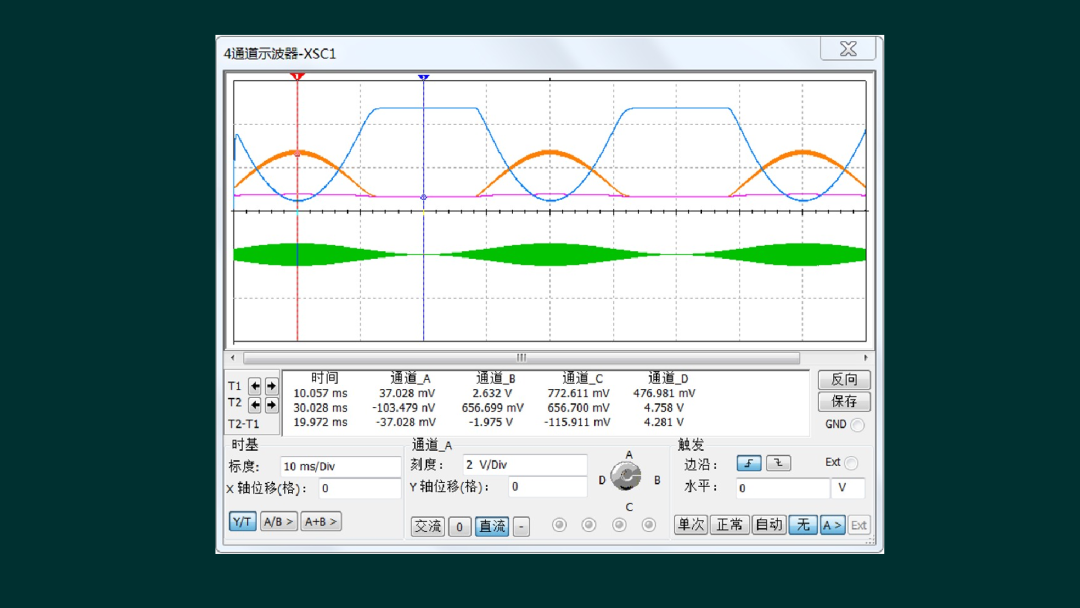
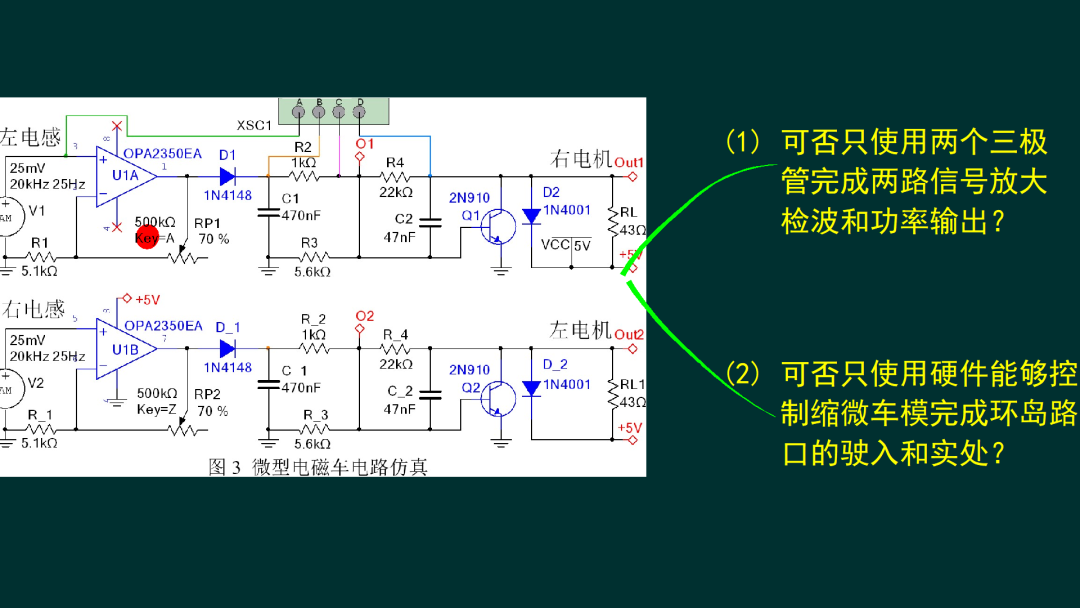
下面,让我们通过设计参考方案手册了解一下同学们制作车模硬件设计电路原理。这是设计手册中给出的仿真参考电路。左边的调幅信号源代表着输入工字型电感感应到的磁场信号。经过一个轨道轨运算放大电路进行单边放大,实际上也实现了信号的半波检波。再经过二极管对电容进行充电,也实现了滤波,滤波后的电压信号正比于输入信号的幅度,通过R2 给后面三极管提供基极导通电流,经过三极管放大之后,驱动外部电机。左右两个电感信号,分别控制对面的两个电机的转速。实现车模自动转向控制。这是对电路中几个关键电路信号的仿真结果,可以看到,输入感应交流信号的幅度,会影响三极管输出电压的大小,进而影响电机的转速。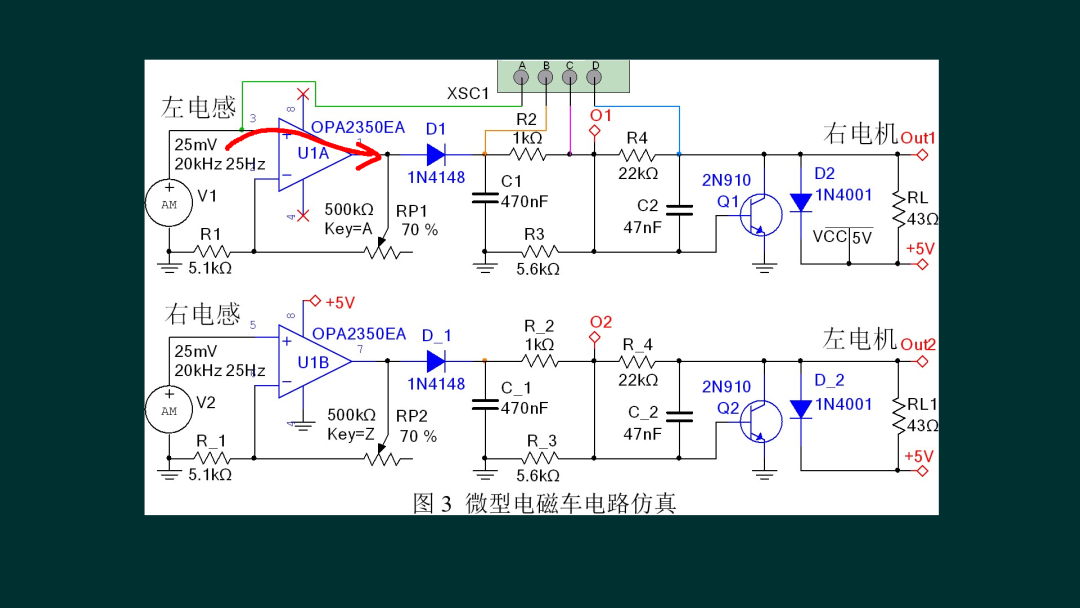
的确,这个控制电路非常精简。适合电子技术初学者进行制作。它甚至没有使用单片机,感觉再复杂那么一点点,就会让人感到小题大做。这种杀鸡用牛刀,对于一位自信而又高傲的设计者来说就是自取其辱。那么问题来了,是否能够将这个电路再进行改进呢 ? 比如,只使用两个三极管便可以完成两路信号的放大检波和功率输出? 不使用运算放大集成芯片,只使用分离元器件完成电路的功能设计。另外,是否可以使用纯硬件方案能够实现对电磁赛道中的环岛的驶入和驶出? 提高电路功能,更能考验同学们对于电子线路的掌握和应用程度。
本文介绍了太原理工大学智能车基地给出的缩微电池车模参考设计方案。基于这个方案,大家可以考虑是否能够进一步简化,或者进一步增加该电路的功能呢?
微型电磁车赛题 | 演示车的设计与调试: https://zhuoqing.blog.csdn.net/article/details/143722454
