LIN协议起源
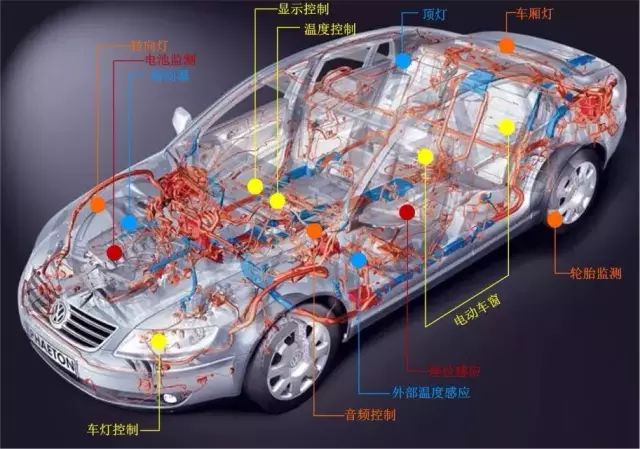
LIN协议起源LIN由汽车行业开发,用作经济高效的子总线系统,其属于CAN的下层网络,是SAE规范的汽车A类网络,适用于对总线性能要求不高的车身系统,如车门、车窗、灯光等智能传感器、执行器的连接和控制,LIN实现了一种具有成本效益的智能传感器和执行器的通讯方式。
LIN联盟成立于1999年,并发布了LIN1.0版本。最初的成员有奥迪、宝马、克莱斯勒、摩托罗拉、博世、大众和沃尔沃等,如下图2为LIN协议的发展史。

图2 LIN协议发展史
LIN协议的数据帧结构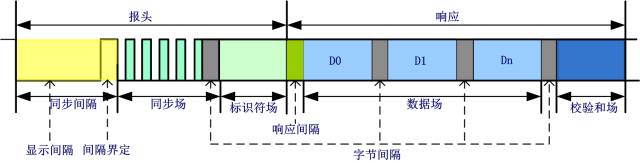
报文头包含同步间隙、同步域和报文标识符场(0~63)。
响应报文由1-9个字节构成:其中2、4或8个字节的数据场和1个校验和场(LIN1.3)。
报文帧之间有帧间间隔分隔。
报文与响应之间有帧内响应空间分隔。
最小帧间间隔和帧内响应空间均为0。
最大长度收到报文帧的最大长度FRAME_max限制。
那为什么用户解码LIN协议会出现数据长度识别错误和校验解码出错问题呢?原因是使用了与输入信号不对应的LIN协议版本进行解码,不同版本的LIN协议存在差异,如下所述。
 LIN2.0相对于LIN1.3最主要的差异
LIN2.0相对于LIN1.3最主要的差异
支持最多8个字节的数据序列。
取消了受保护标识符中的数据长度字段,即传输长度不再受限于ID,并将最后一个字节视为校验和。
校验和的验算包括了受保护标识符。
支持自动波特率检测功能。
对零星帧进行了定义。
网络管理的定时用秒来定义,而不是用比特数来定义。
简化状态管理和直接向网络汇报,应用变得标准化。
增加强制节点配置命令以及一些可选择的命令。
增加了诊断功能。
致远电子CAN FD/LIN接口卡USBCANFD-400U是致远电子最新款国产USB转CAN FD/LIN接口卡,配套国产汽车总线工具链软件ZXDoc,可以完成各类项目测试,详情欢迎咨询我们。