

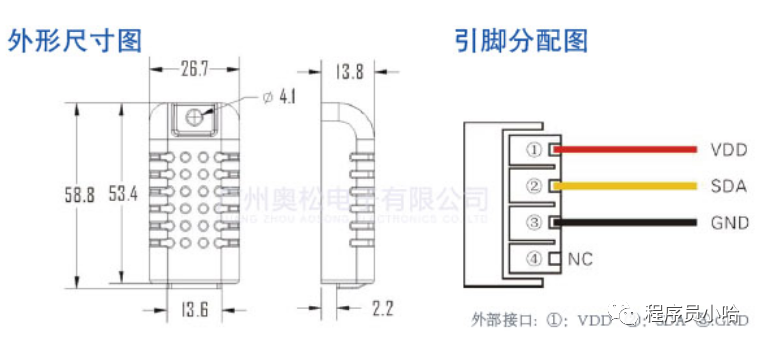
DHT11:
测量范围:20-90% RH 0-50℃
测湿精度:±5% RH
测温精度:±2℃
分辨力:1
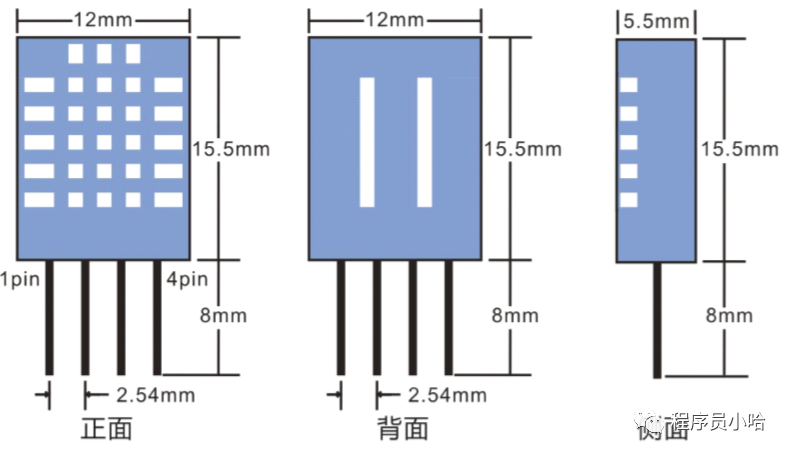
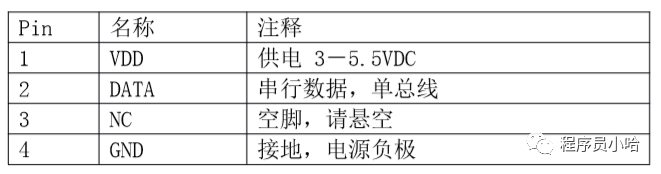
DHT11引脚说明(正面观看,左边的为1脚):
DHT21(AM2301):
测量范围:0-99.9% RH -40~+80℃
测湿精度:±3% RH
测温精度:±0.5℃
分辨力:0.1%RH/0.1℃

典型应用电路:
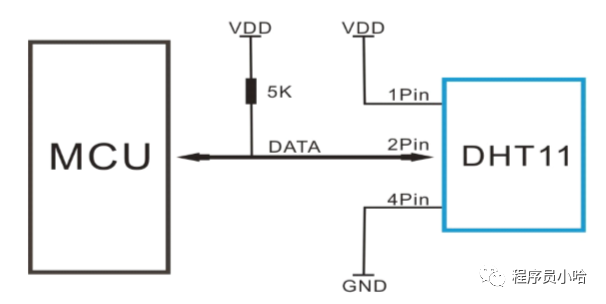
说明:
注意:
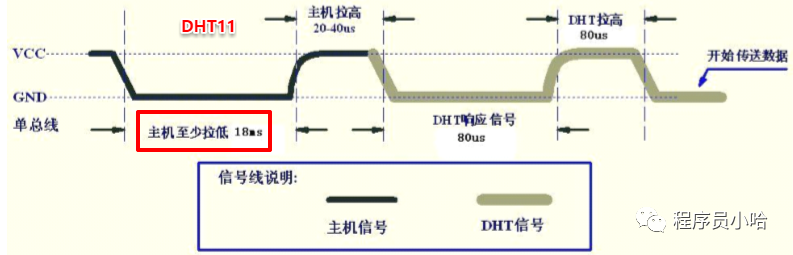
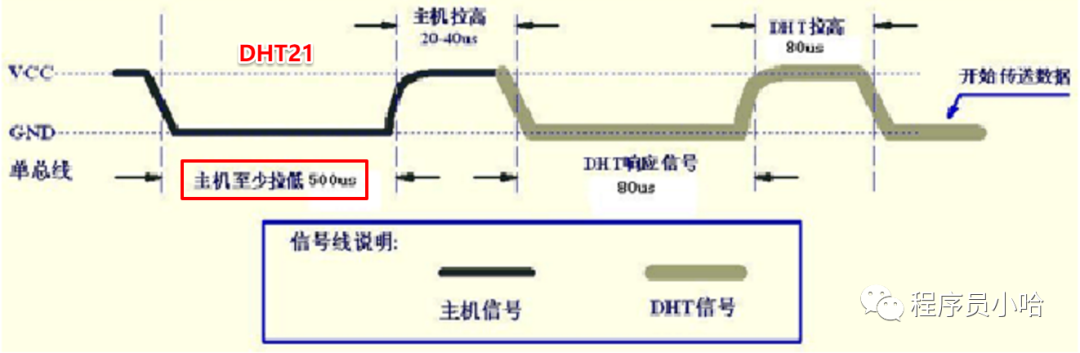
DHT11总线驱动过程:
注意:
40bit数据(5字节数据)数据包:
DHT11
数据格式: 40bit数据=8位湿度整数+8位湿度小数+8位温度整数+8位温度小数+8位校验
DHT21
数据格式: 40bit数据=16bit湿度数据+16bit温度数据+8bit校验和
例子: 接收40bit数据如下:
0000 0010 1000 1100 0000 0001 0101 1111 1110 1110
湿度数据 温度数据 校验和
湿度高8位+湿度低8位+温度高8位+温度低8位=和的低8位=校验和
例如:0000 0010+1000 1100+0000 0001+0101 1111=1110 1110
湿度=65.2%RH
温度=35.1℃
当温度低于0℃时温度数据的最高位置1。
例如:-10.1℃表示为1000 0000 0110 0101
注意:DHT21温湿度数据为16位,DHT11数据为8位,所以尽管两者时序相同,却不能用同样的数据类型计算。
/*** @brief 读取40bit数据* @param none.* @retval 1 读取成功,0读取失败.*/int DHT11_ReadData(void){unsigned int cout = 1;unsigned int T_H, T_L, H_H, H_L, Check;//设置IO为输出模式DHT_Set_Output();//1、MCU发送开始起始信号DHT_ResetBit();delay_ms(25); //拉低至少18msDHT_SetBit();delay_us(20); //拉高20~40us//设置IO口为输入模式DHT_Set_Input();//2、读取DHT11响应if(DHT_ReadBit() == Bit_RESET){//等待80us的低电平cout = 1;while(!DHT_ReadBit() && cout++);//等待80us的高电平cout = 1;while(DHT_ReadBit() && cout++);//3、DHT11送出40bit数据//读取8bit的湿度整数数据H_H = DH21_ReadByte();//读取8bit的湿度小数数据H_L = DH21_ReadByte();//读取8bit的温度整数数据T_H = DH21_ReadByte();//读取8bit的温度小数数据T_L = DH21_ReadByte();//读取8位的校验和Check = DH21_ReadByte();//校验数据是否合法,合法的话将数据保存到全局结构体变量中备用if(Check == (H_H + H_L + T_H + T_L)){DHT11.Hum_H = H_H;DHT11.Hum_L = H_L;DHT11.Tem_H = T_H;DHT11.Tem_L = T_L;return 1;}else{return 0;}}return 0;}
数据'0'还是'1'判定规则:
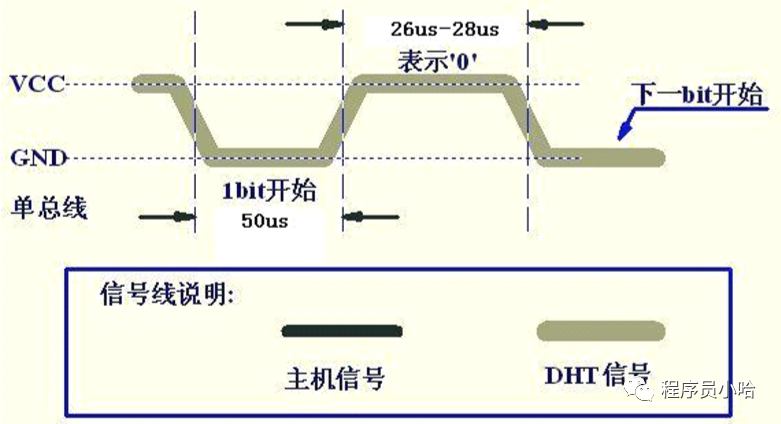
位数据“0”判定图
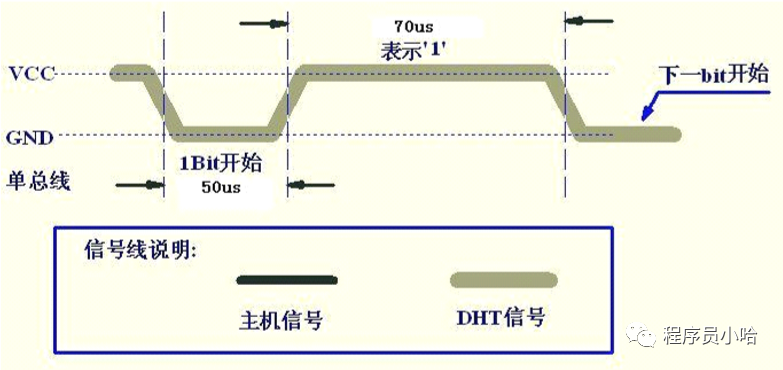
位数据“1”判定图
该函数的具体实现如下:
/*** @brief 读取8bit 数据* @param none.* @retval none.*/int DH21_ReadByte(void){int data=0;char i;char cout;for(i=0; i<8; i++){//1、等待50us低电平结束cout=1;while(!DHT_ReadBit() && cout++);//2、数据拉高后,判断30us后数据总线电平的高低//延时30us之后读取IO口的状态delay_us(30);//先把上次的数据移位,再保存本次的数据位。data = data << 1;if(DHT_ReadBit() == Bit_SET){data |= 1;}//等待输入的是低电平(高电平结束),进入下一位数据接收cout=1;while(DHT_ReadBit() && cout++);}return data;}
对40bit数据处理,得到温湿度数据:
/*** @brief 获取温度* @param none.* @retval Temp, 温度值*/int DHT11_GetTem(void){//return (DHT11.Tem_H << 8 | DHT11.Tem_L); //DHT21return (DHT11.Tem_H*10 + DHT11.Tem_L); //DHT11}/*** @brief 获取湿度* @param none.* @retval Hum,湿度值*/int DHT11_GetHum(void){//return (DHT11.Hum_H << 8 | DHT11.Hum_L); //DHT21return (DHT11.Hum_H*10 + DHT11.Hum_L); //DHT11}
注意:
程序员小哈带你玩转嵌入式,微信搜索:嵌入式从0到1,更多干货等着你。

