

概述
RT-Thread 对SPI总线的驱动,抽象出了spi bus 的设备驱动,我们基于S32K146 的硬件学习spi bus 设备驱动。
RT-Thread 官方文档https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/spi/spi对SPI总线驱动有详细说明。
SPI总线驱动适配
驱动涉及的主要结构体为如下:
rt_spi_device:app 通过该结构体和bus 绑定通过bus 控制spi总线
rt_spi_bus spi bus总线设备抽象
rt_spi_ops bus设备依赖的底层操作函数
结构体关系如下:
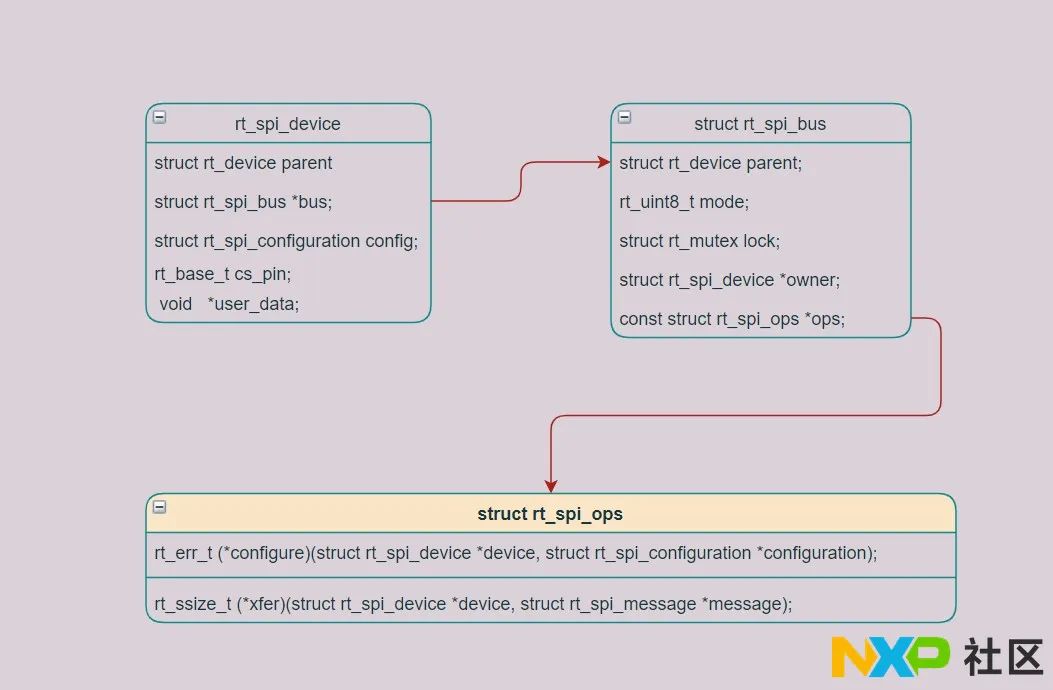
对于总线设备的驱动对接我们需要实现对应的ops函数。
使用S32 Design Studio 工具配置spi1
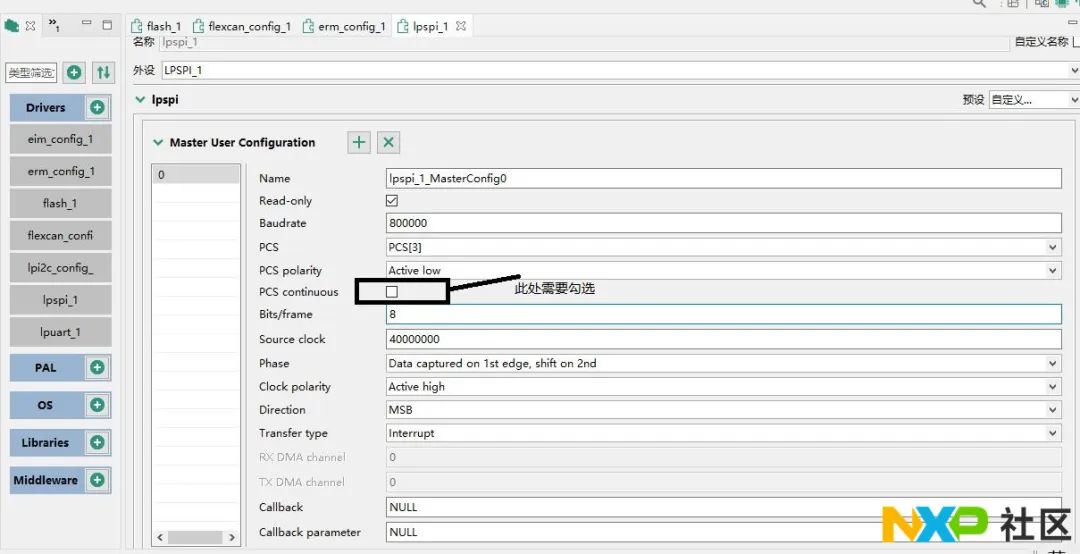
本次实验使用的是lpspi1 ,首先使用S32 Design Studio 工具生成pinmux 和 clk 初始化配置代码。
配置SPI1 master 参数
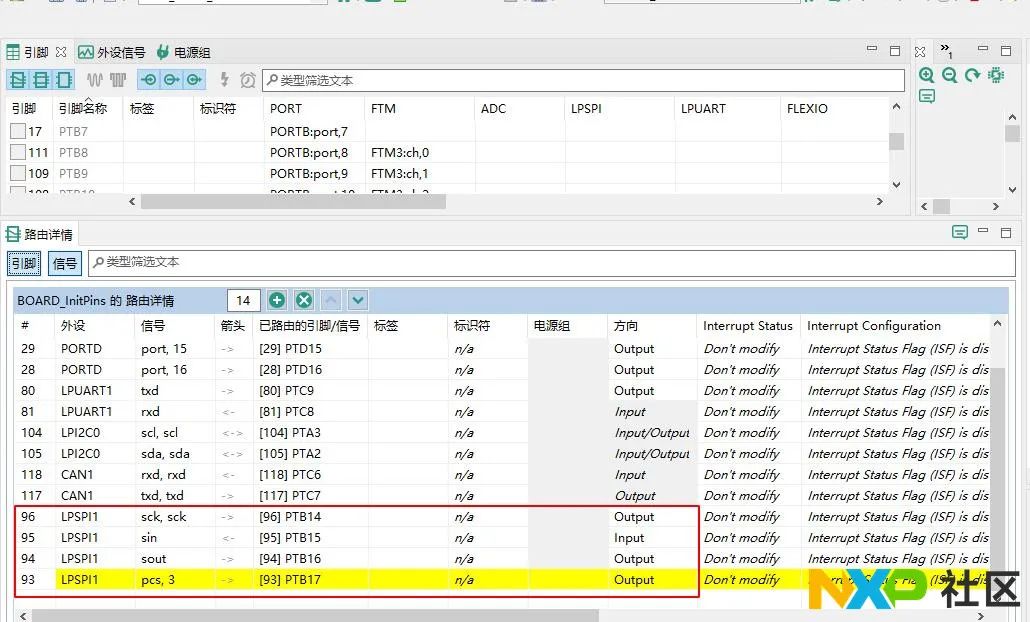
配置pimmux
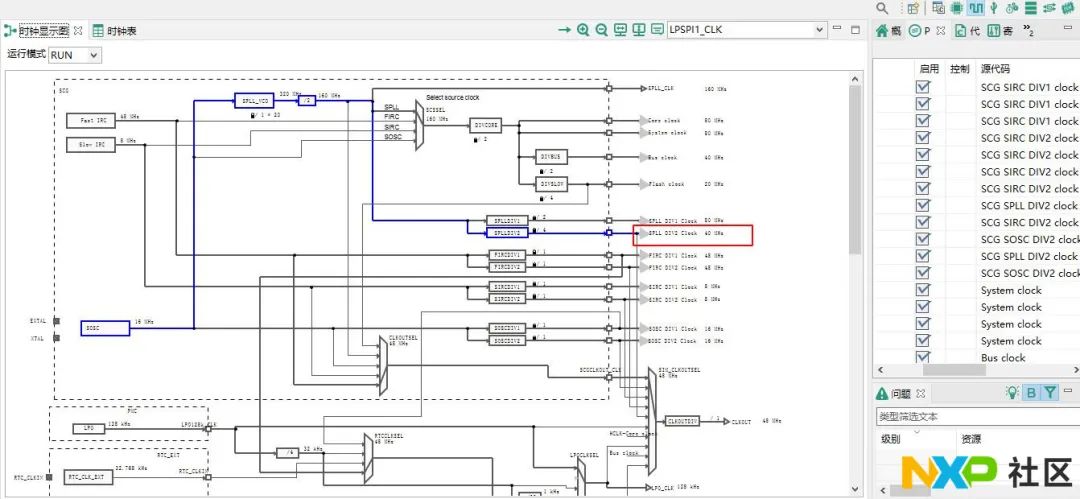
配置clk
适配SPI1 ops 函数至RT-Thread
根据上面的梳理,依赖芯片层实现ops函数并开启spi设备驱动
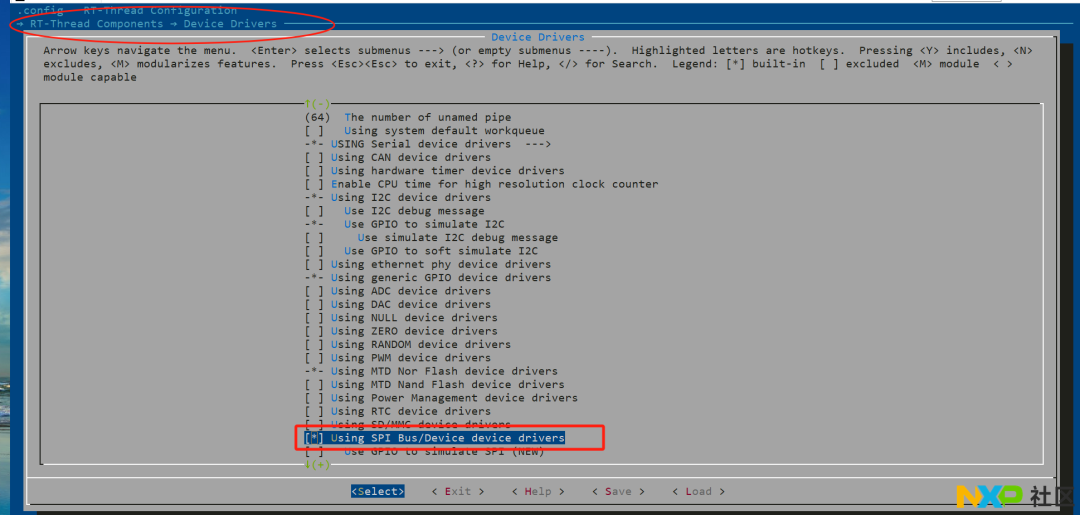
config ops函数
tatic rt_err_t spi_configure(struct rt_spi_device* device,struct rt_spi_configuration* configuration){struct rt_spi_bus * spi_bus = (struct rt_spi_bus *)device->bus;struct s32k_spi *spi_device = (struct s32k_spi *)spi_bus->parent.user_data;status_t ret;RT_ASSERT(device != RT_NULL);RT_ASSERT(configuration != RT_NULL);/* config spi init spi bus *///LPSPI_DRV_MasterDeinit(spi_device->instance);switch(configuration->mode & RT_SPI_MODE_3){case RT_SPI_MODE_0:spi_device->masterconfig->clkPhase = LPSPI_CLOCK_PHASE_2ND_EDGE;spi_device->masterconfig->clkPolarity = LPSPI_SCK_ACTIVE_LOW;break;case RT_SPI_MODE_1:spi_device->masterconfig->clkPhase = LPSPI_CLOCK_PHASE_1ST_EDGE;spi_device->masterconfig->clkPolarity = LPSPI_SCK_ACTIVE_LOW;break;case RT_SPI_MODE_2:spi_device->masterconfig->clkPhase = LPSPI_CLOCK_PHASE_2ND_EDGE;spi_device->masterconfig->clkPolarity = LPSPI_SCK_ACTIVE_HIGH;break;case RT_SPI_MODE_3:spi_device->masterconfig->clkPhase = LPSPI_CLOCK_PHASE_1ST_EDGE;spi_device->masterconfig->clkPolarity = LPSPI_SCK_ACTIVE_HIGH;break;}/* MSB or LSB */if(configuration->mode & RT_SPI_MSB){spi_device->masterconfig->lsbFirst = false;}else{spi_device->masterconfig->lsbFirst = true;}if(configuration->max_hz < 10000000)spi_device->masterconfig->bitsPerSec = configuration->max_hz;spi_device->masterconfig->bitcount = configuration->data_width;ret = LPSPI_DRV_MasterInit(spi_device->instance,spi_device->status,spi_device->masterconfig);RT_ASSERT(ret == STATUS_SUCCESS);ret = LPSPI_DRV_MasterSetDelay(spi_device->instance, 1, 1, 1);RT_ASSERT(ret == STATUS_SUCCESS);return ret == STATUS_SUCCESS ? RT_EOK:RT_ERROR;
xfer ops 函数
truct s32k_spi{struct rt_spi_bus spi_bus; /* spi bus device */lpspi_master_config_t * masterconfig; /* lpspi master config */lpspi_state_t * status; /* lpspi driver status */uint32_t instance; /* spi instance id */char * bus_name;}s32k_spi_t;static rt_ssize_t spixfer(struct rt_spi_device* device, struct rt_spi_message* message){struct rt_spi_bus * spi_bus = (struct rt_spi_bus *)device->bus;struct s32k_spi *spi_device = (struct s32k_spi *)spi_bus->parent.user_data;status_t ret;RT_ASSERT(device != NULL);RT_ASSERT(message != NULL);ret = LPSPI_DRV_MasterTransferBlocking(spi_device->instance,message->send_buf,message->recv_buf,message->length,1000);RT_ASSERT(ret == STATUS_SUCCESS);return ret == STATUS_SUCCESS ? message->length:0;
添加如下初始化代码像系统注册spibus设备
xtern void LPSPI_DRV_IRQHandler(uint32_t instance);void S32K14X_LPspi1_Master_Slave_IRQHandler(void){/* enter interrupt */rt_interrupt_enter();LPSPI_DRV_IRQHandler(1);/* leave interrupt */rt_interrupt_leave();}/* private rt-thread spi ops function */static struct rt_spi_ops s32k_spi_ops ={.configure = spi_configure,.xfer = spixfer,};static struct s32k_spi spi1;int rt_hw_spi_init(void){int result = 0;/* config spi strruct */spi1.instance = INST_LPSPI_1;spi1.masterconfig = &lpspi_1_MasterConfig0;spi1.status = &lpspi_1State;spi1.spi_bus.parent.user_data = (void *)&spi1;spi1.bus_name = "spi1";result = rt_spi_bus_register(&spi1.spi_bus, spi1.bus_name, &s32k_spi_ops);RT_ASSERT(result == RT_EOK);LOG_D("%s bus init done", spi1.bus_name);if(result == RT_EOK){INT_SYS_InstallHandler(LPSPI1_IRQn,S32K14X_LPspi1_Master_Slave_IRQHandler,NULL);}return result;}INIT_APP_EXPORT(rt_hw_spi_init);
验证
添加如下测试代码输入 spi10 open/config/readid 命令打开并挂载到spi1总线,并读取板子上的spi flash 的id信息
includestruct rt_spi_device spi1_device;static void spi10(int argc,char *argv[]){rt_err_t ret;struct rt_spi_configuration cfg;uint8_t sendbuff[4] = {SPF_R_JEDEC_CMD,0x00,0x00,0x00};uint8_t recvbuff[4] = {0x00,0x00,0x00,0x00};if(!strcmp(argv[1], "readid")){rt_spi_transfer(&spi1_device,sendbuff,recvbuff,4);rt_kprintf("read did [%x][%x][%x]\n",recvbuff[1],recvbuff[2],recvbuff[3]);}else if(!strcmp(argv[1], "open")){ret = rt_spi_bus_attach_device(&spi1_device,"spi10","spi1",NULL);if(ret != RT_EOK)rt_kprintf("attach spi1 faied %d\n",ret);}else if(!strcmp(argv[1], "config")){cfg.data_width = 8;cfg.max_hz = 8000000;cfg.mode = RT_SPI_MODE_3 | RT_SPI_MSB;rt_spi_configure(&spi1_device,&cfg);}else if(!strcmp(argv[1], "read")){}}MSH_CMD_EXPORT(spi10, spi10 flash test)
输入命令验证已经读取到flash 的Id 信息说明SPI 总线和spi flash 通信ok ,而且系统内也已经多了spi1 bus设备和spi10 的spi 设备节点。
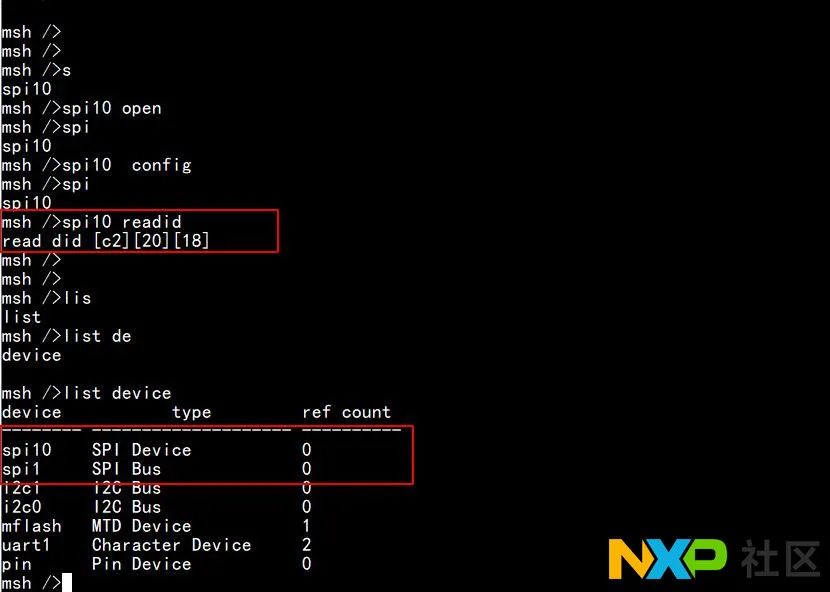
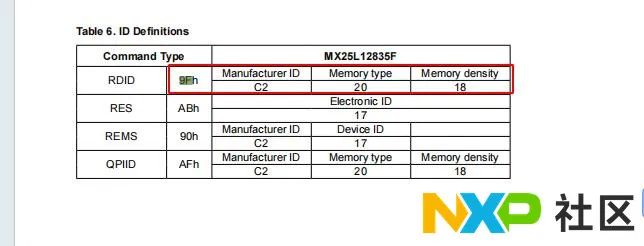
试验读取的did和芯片手册的也是一致的。
测试代码已提交如下路径:
https://gitee.com/andeyqi/rt-thread/tree/dev/bsp/s32k14x


想要在RT-Thread平台或社区投放内容?或想参与相关直播活动及赛事?RT-Thread已开放对接窗口,请通过邮件与我们取得联系,期待合作!
