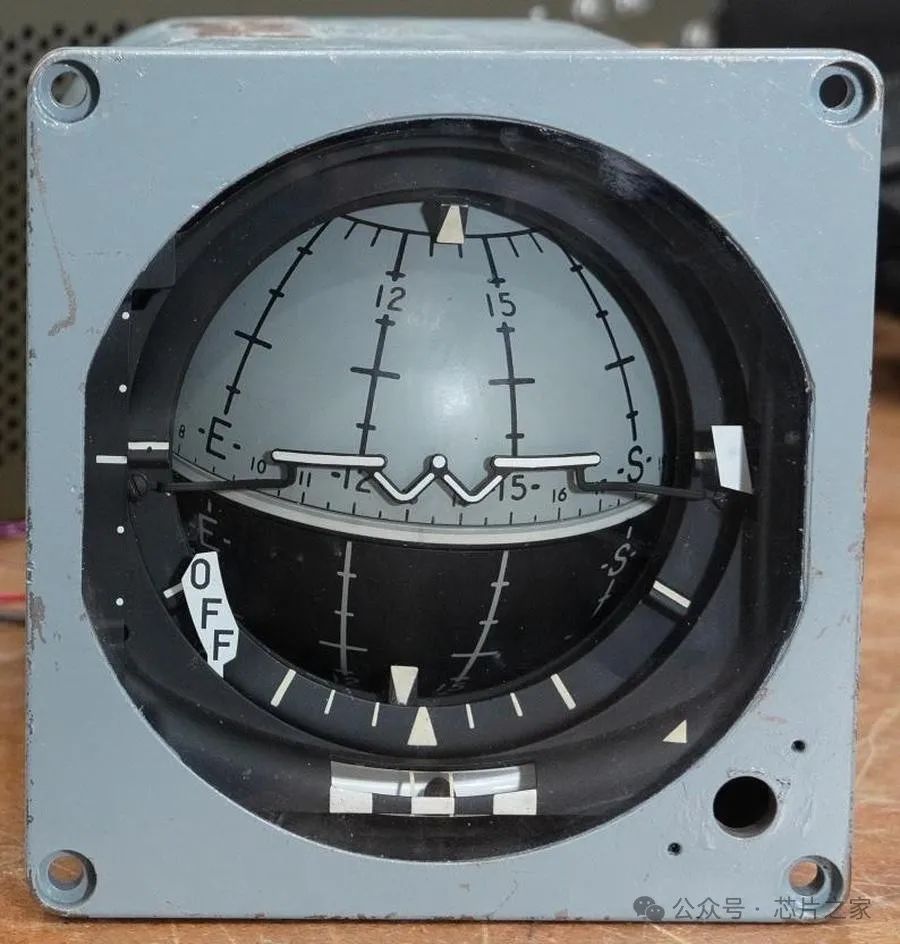
最近淘到了一个F-4战斗机上用的一个姿态指示器,这是一种使用旋转球显示飞机方向的仪器。普通飞机中,人工地平仪显示两个轴(俯仰和滚转)的方向,但 F-4 指示器使用旋转球显示三个轴的方向,添加了方位角(偏航)。 这里有个不明白的地方,如何在三个轴上旋转的:它如何能向各个方向转动,同时仍然附着在仪器上。
F-4战斗机
F-4 是一款超音速战斗机,生产于 1958 年至 1981 年,共生产了 5000 多架,是有史以来产量最多的美国超音速飞机,也是越南战争中的主要战斗机,90年代的海湾战争也有使用,F-4战斗机可以携带核弹。

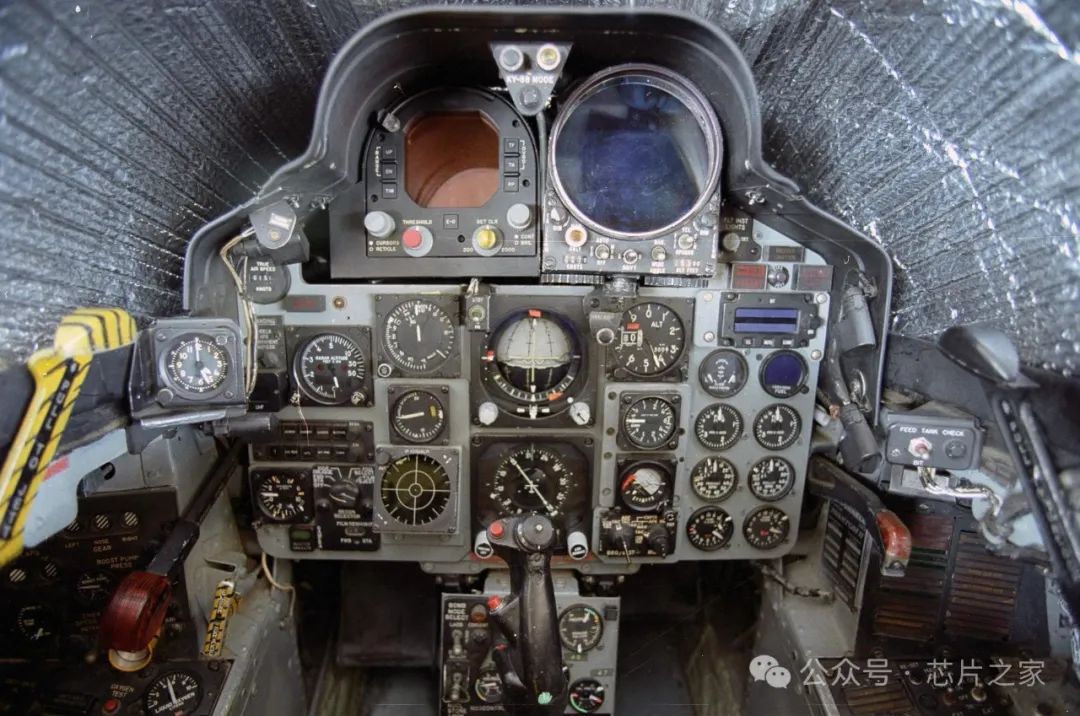
F-4 是双座飞机,雷达拦截官坐在飞行员后面的座位上控制雷达和武器。两个驾驶舱都有一个塞满仪表的面板,侧面还有额外的仪表和控制装置。如下图所示,飞行员面板的中央位置有一个三轴姿态指示器,就在红色雷达瞄准镜的正下方。

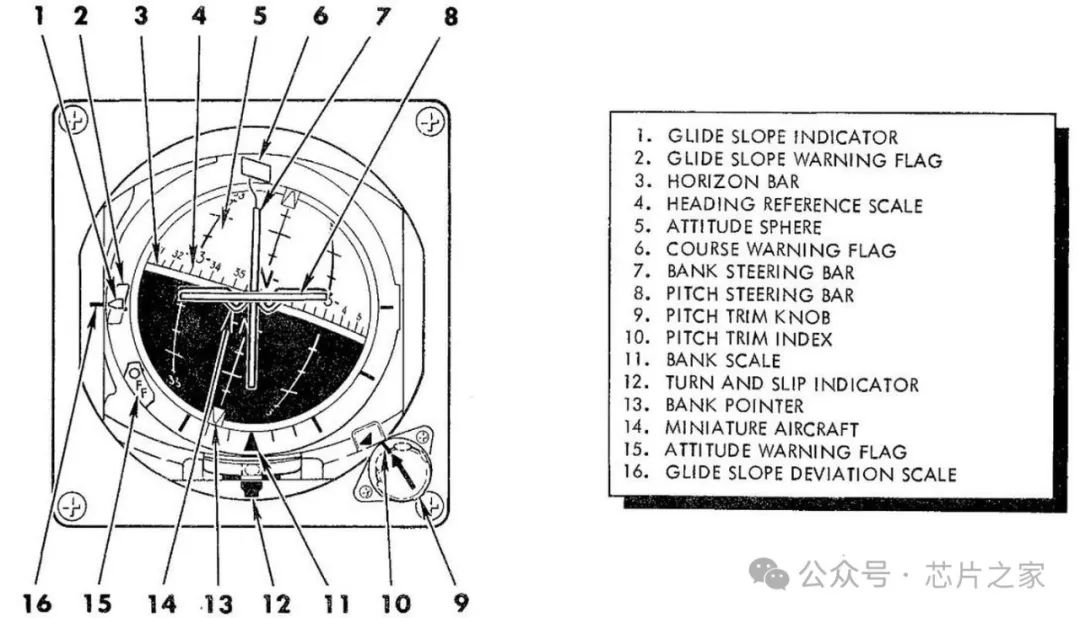
三个轴显示飞机的位置。如果飞机沿飞行轴左右滚动,则滚动轴指示飞机的角度,如果飞机向上或向下俯仰,则俯仰轴指示飞机的角度,最后,方位角轴指示飞机前进的罗盘方向,该方向会因飞机左转或右转(偏航)而改变。指示器还具有移动指针和状态标志的作用。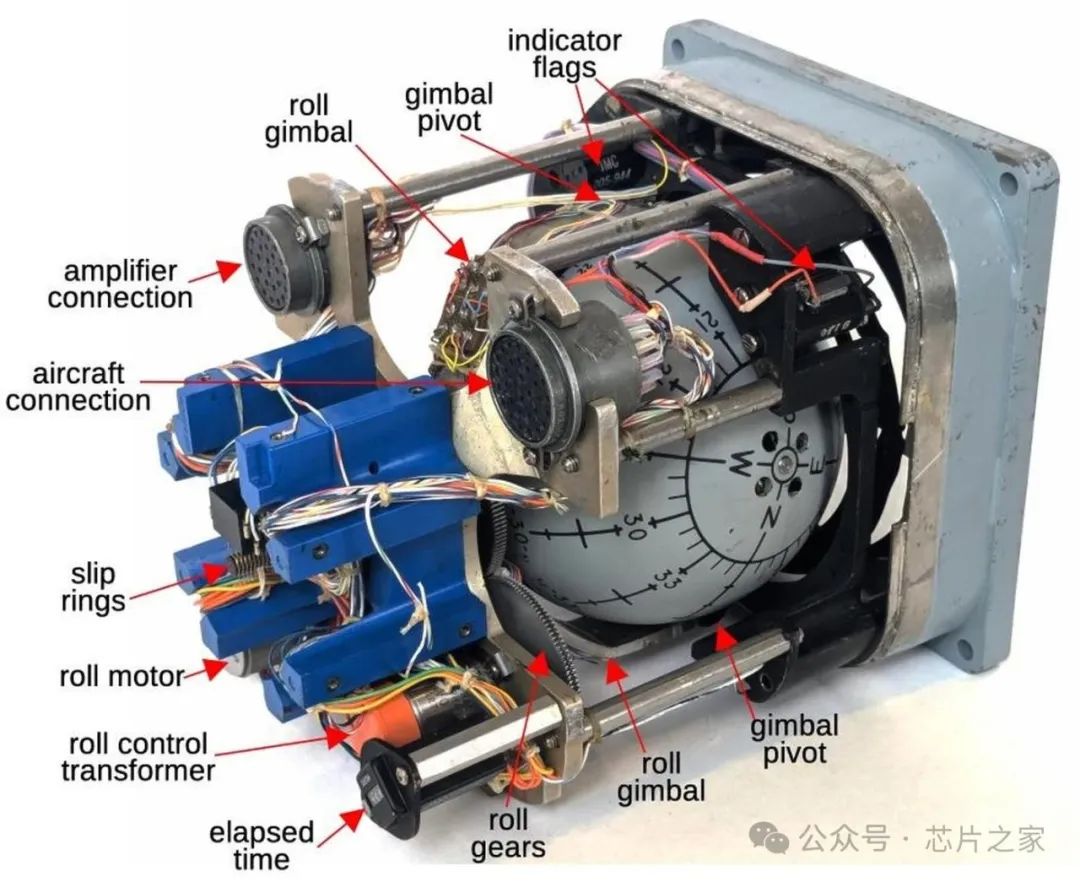
方位电机使球壳围绕方位轴旋转,而机构本身保持静止。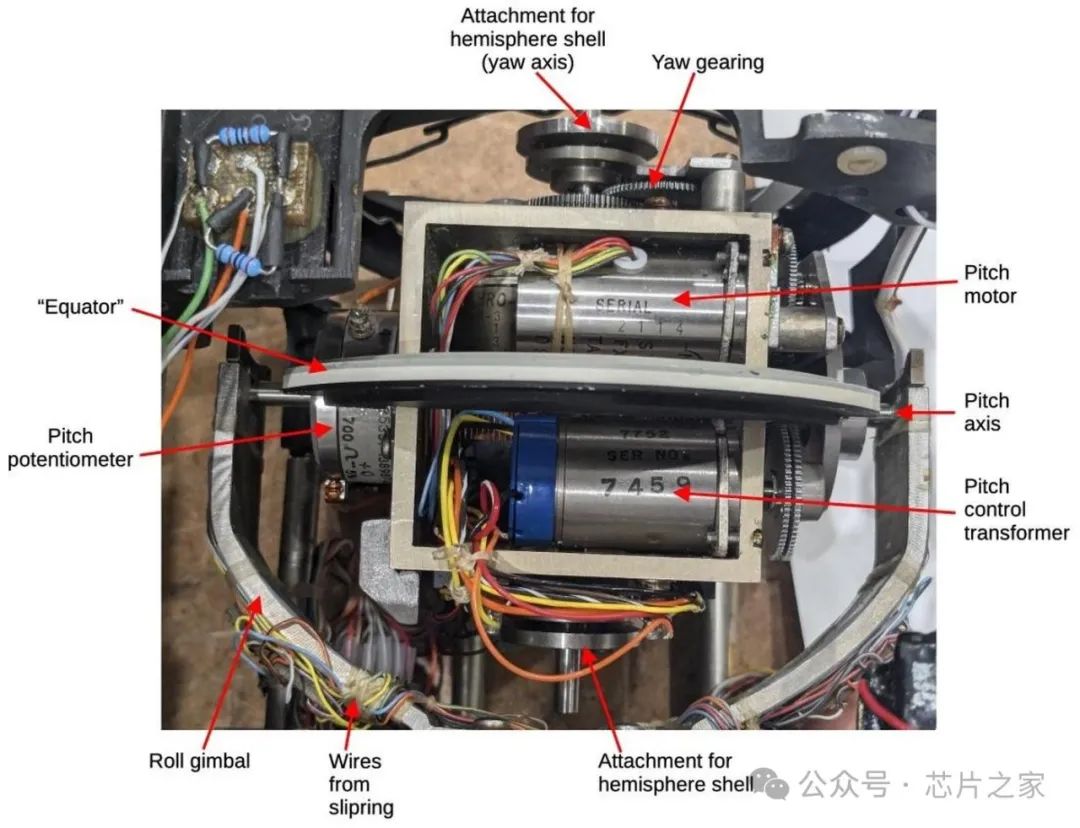
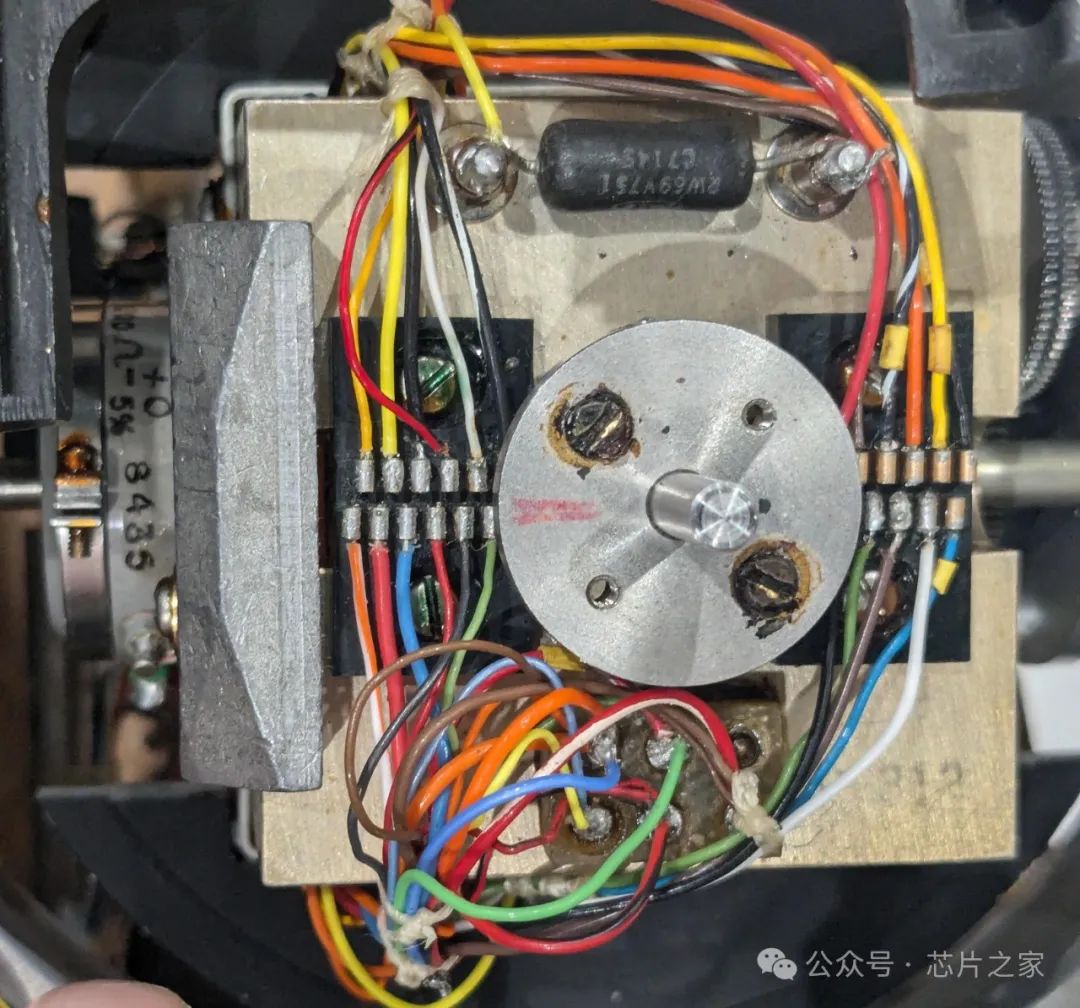
解决方案是使用两组滑环来实现电气连接。下图显示了第一个滑环组件,它处理围绕滚动轴的旋转,这些滑环将仪器的固定部分连接到旋转的滚动万向架。黑色底座和垂直电线连接到仪器上,而中间的条纹轴与球组件外壳一起旋转。在轴内部,电线从圆形金属触点连接到滚动万向架。
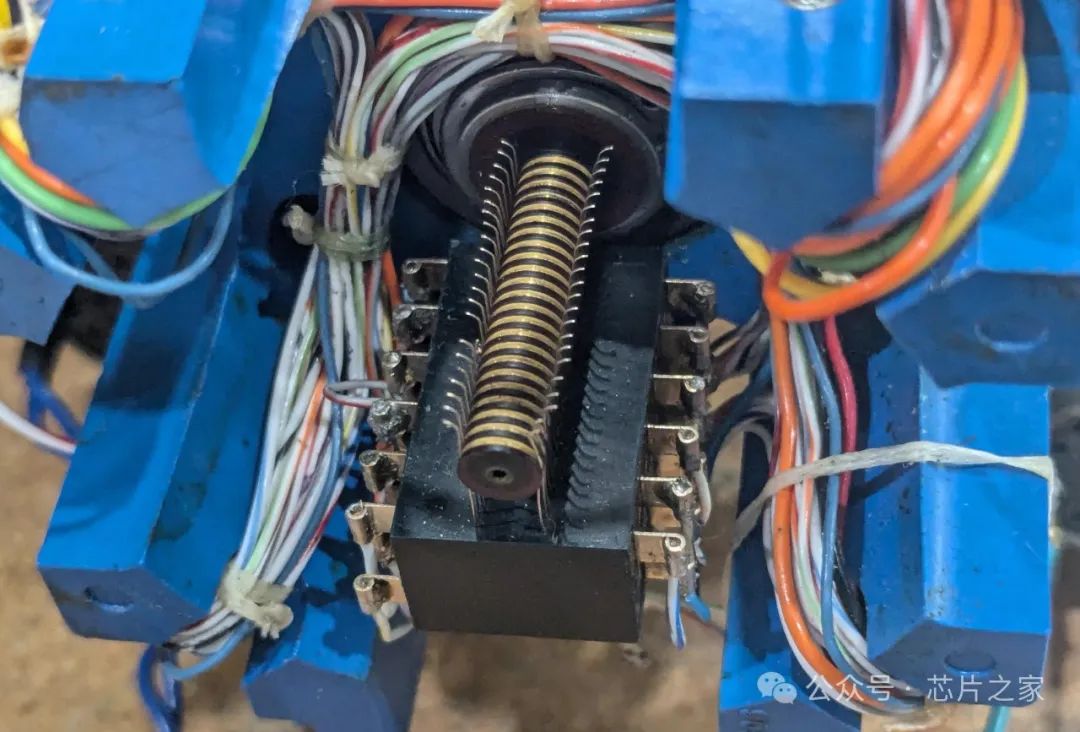
在球体内部,第二组滑环为滚动万向架上的接线和球体机构提供电气连接。下图显示了这些滑环的连接,用于处理围绕俯仰轴(照片中为水平轴)的旋转,(滑环本身位于内部,不可见。)从组件中伸出的轴围绕方位角(偏航)轴旋转,半球附在金属盘上。方位角轴不需要滑环,因为只有球壳旋转,电子设备保持静止。
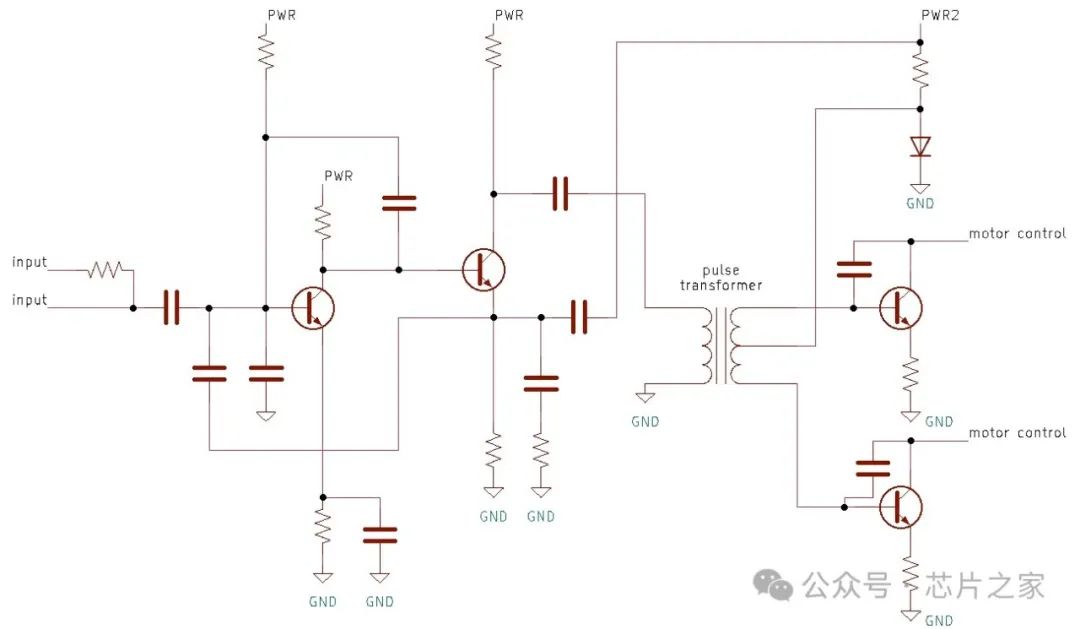
这里大概解释下伺服回路是如何控制电机的,姿态指示器由外部陀螺仪驱动,接收指示横滚、俯仰和方位角位置的电信号。与 20 世纪 60 年代的航空电子设备一样,信号由同步器传输,同步器使用三根电线指示角度,姿态指示器内的电机旋转,直到指示器的三个轴的角度与输入角度匹配。
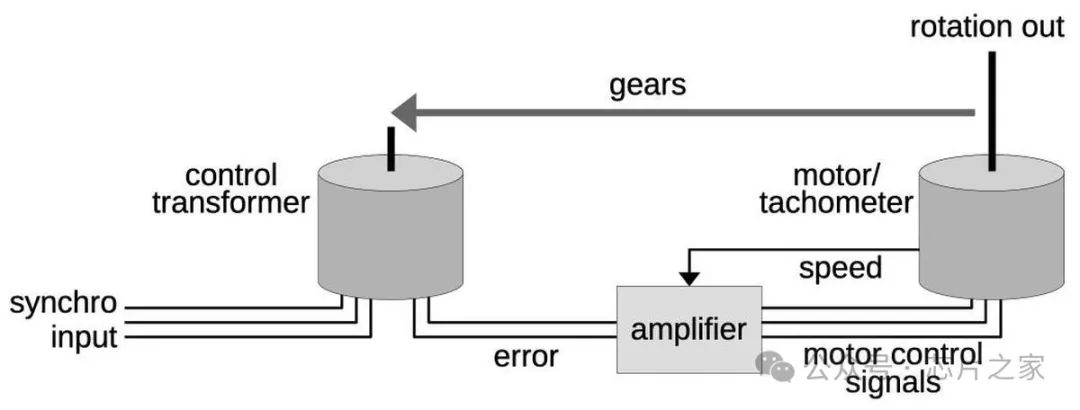
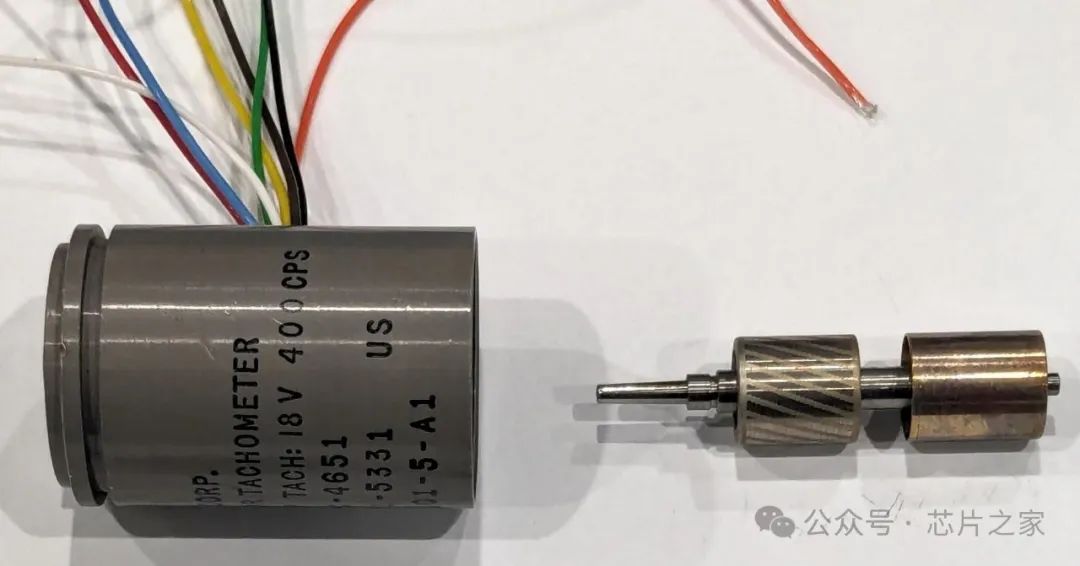
每个电机由伺服环路控制,如下图所示。目标是将输出轴旋转到与三根同步线指定的输入角度完全匹配的角度。这里的关键是,一种称为控制变压器的设备,它接收三线输入角度和物理轴旋转,并生成一个误差信号,指示所需角度和物理角度之间的差异。放大器以适当的方向驱动电机,直到误差信号降至零,为了改善伺服环路的动态响应,转速表信号用作负反馈电压。这可确保电机在系统接近正确位置时减速,因此电机不会超出位置并振荡。(这有点像 PID 控制器。)

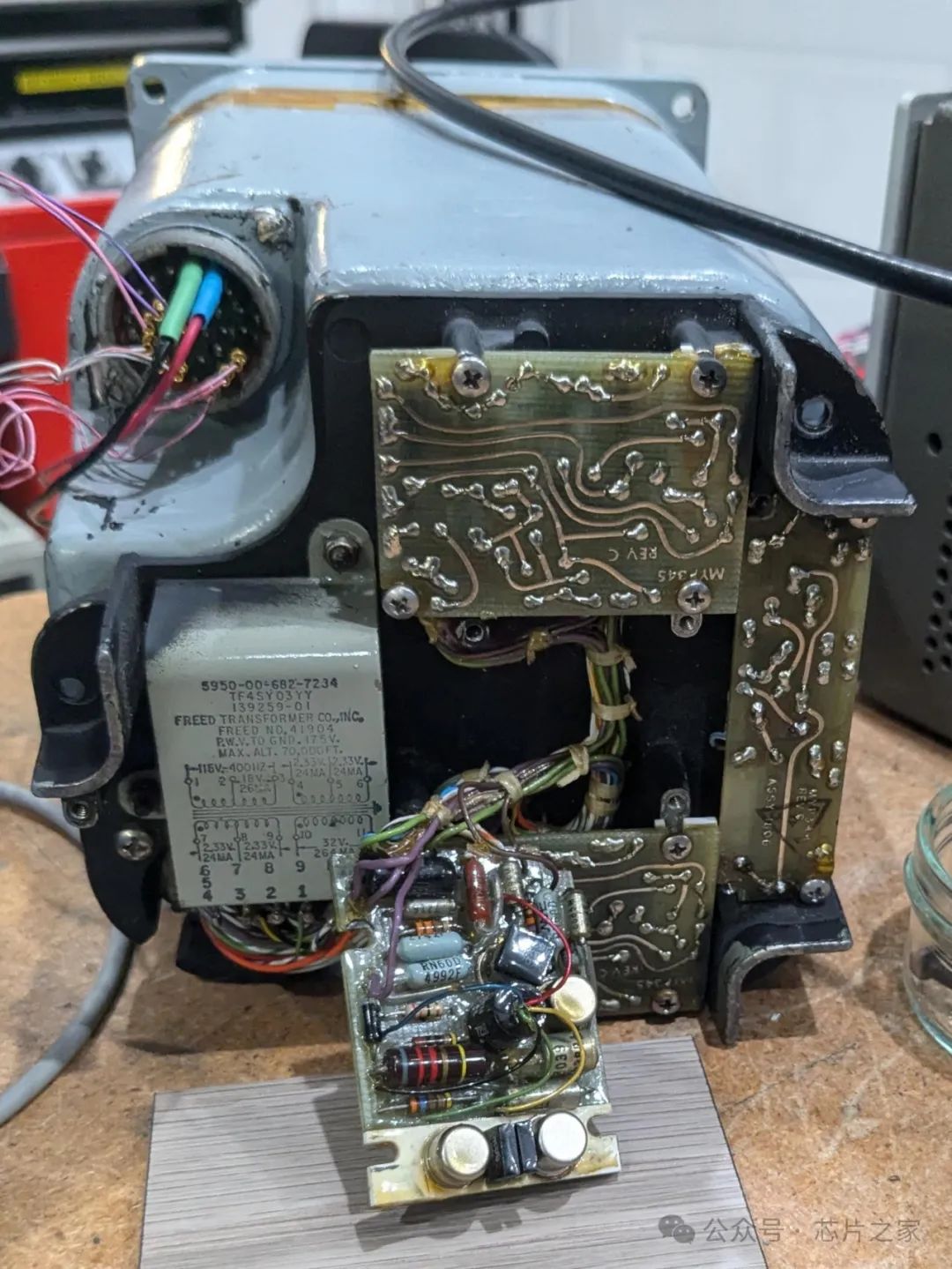
放大器组件包含三个独立的误差放大器,每个轴一个,每个包含三个放大器板(用于横滚、俯仰和方位角)、一个直流电源板、一个交流变压器和一个微调电位器。

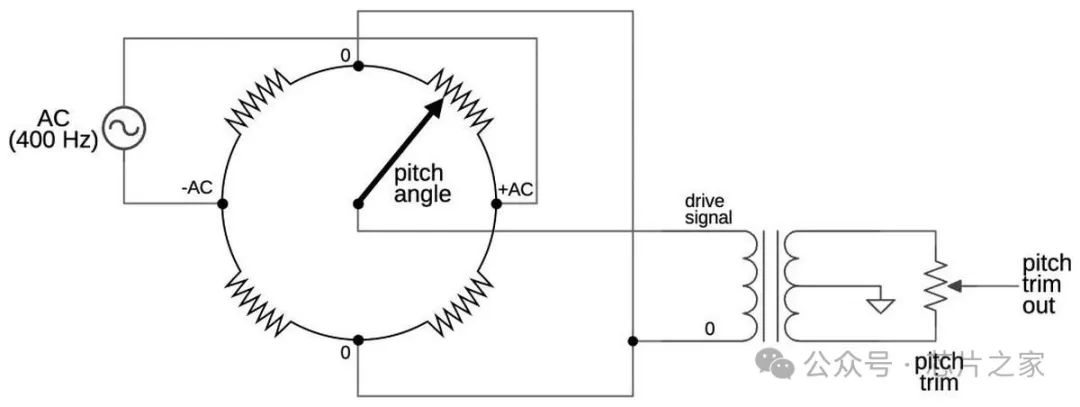
俯仰调整电路
姿态指示器是任何飞机都会用到的关键仪器,在能见度低的条件下飞行时尤其重要。F-4 的姿态指示器超越了普通飞机的人工地平仪,增加了第三个轴来显示飞机的航向。不过,支持第三个轴会使仪器复杂得多。



【拆解】1968年的美国军用计算机
Globus INK 内部:欣赏下用于苏联航天的机械导航计算机
【绝密】泰坦导弹制导计算机内部!

俄S400防空导弹生产线曝光 电路板PCBA工艺略感人
