有人说,20世纪是电的世纪,21世纪是光的世纪;知光解电,再小的个体都可以被赋能。追光逐电,光赢未来...欢迎来到今日光电!

 在这两个坐标系的坐标
在这两个坐标系的坐标  和
和  。那么根据坐标系转换公式,我们可以得到:
。那么根据坐标系转换公式,我们可以得到:
 就代表我们希望求出来的相机到机器人的转换矩阵。 和 为补1后的“齐次坐标”:
就代表我们希望求出来的相机到机器人的转换矩阵。 和 为补1后的“齐次坐标”:  ,这样我们的齐次坐标变换矩阵 便可以同时包含旋转以及平移。 的个数大于我们求解的转换矩阵维度同时这些点线性不相关,我们便可以通过伪逆矩阵计算出来 :
,这样我们的齐次坐标变换矩阵 便可以同时包含旋转以及平移。 的个数大于我们求解的转换矩阵维度同时这些点线性不相关,我们便可以通过伪逆矩阵计算出来 :
 直接拟合两组坐标之间的关系:
直接拟合两组坐标之间的关系: 在两个坐标系的坐标 和 并且测量出来多组数据,我们就可以很方便地计算出来坐标变换矩阵。当然在实际过程中我们有可能很难同时测量出来固定点 在两个坐标系的坐标,在后面我会分相机和机器人的情况讨论如何用一些小trick来尽量实现这个测量目标,如何进行标定,以及如何进行标定精度的验证。
在两个坐标系的坐标 和 并且测量出来多组数据,我们就可以很方便地计算出来坐标变换矩阵。当然在实际过程中我们有可能很难同时测量出来固定点 在两个坐标系的坐标,在后面我会分相机和机器人的情况讨论如何用一些小trick来尽量实现这个测量目标,如何进行标定,以及如何进行标定精度的验证。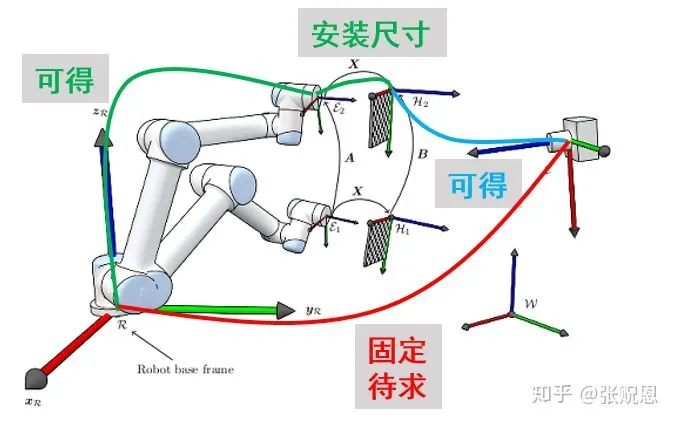
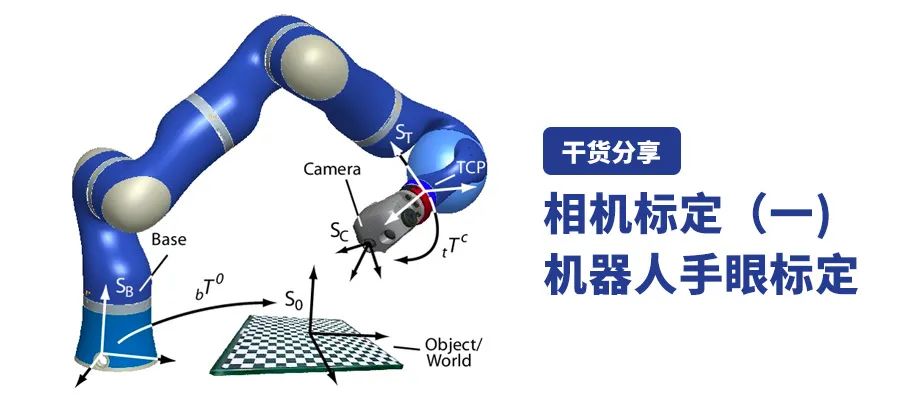
 。注意我们这里用的base而不是robot来表示机器人基座坐标系,因为需要与机器人其他部分的坐标系进行区分。机器人基座坐标系是固定不动的,而其他的关节,例如机器人末端坐标系end,是不断变化的。考虑到相机是固定在一个位置,因此相机只有相对于基座坐标系才是固定不动的,这样我们的待求量 是一个固定参数,标定才有意义。 在机器人基座坐标系下的坐标
。注意我们这里用的base而不是robot来表示机器人基座坐标系,因为需要与机器人其他部分的坐标系进行区分。机器人基座坐标系是固定不动的,而其他的关节,例如机器人末端坐标系end,是不断变化的。考虑到相机是固定在一个位置,因此相机只有相对于基座坐标系才是固定不动的,这样我们的待求量 是一个固定参数,标定才有意义。 在机器人基座坐标系下的坐标  和 在相机坐标系下的坐标 。那么怎么去测量这些点的坐标呢?接下来我们需要用到一个标定神器:棋盘格。
和 在相机坐标系下的坐标 。那么怎么去测量这些点的坐标呢?接下来我们需要用到一个标定神器:棋盘格。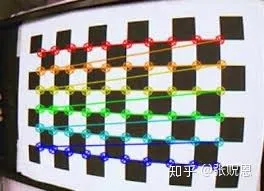
 ,但是这是二维坐标,通过相机内参和物体的深度信息我们可以计算出来 ,这个我们之后会分为3D相机和2D相机进行讨论。我们可以假设已经测量出来了,接下来我们只要测量出来对应的棋盘格点在机器人中的坐标 ,便可以标定出来机器人和相机之间的转换矩阵 。棋盘格在标定的时候,会固定在机器人的末端,而机器人的末端坐标系(end)到基座坐标系(base)可以通过机器人正向运动学计算得到。那么我们可以通过如下关系测量出来棋盘格点在机器人基座坐标系的坐标 :
,但是这是二维坐标,通过相机内参和物体的深度信息我们可以计算出来 ,这个我们之后会分为3D相机和2D相机进行讨论。我们可以假设已经测量出来了,接下来我们只要测量出来对应的棋盘格点在机器人中的坐标 ,便可以标定出来机器人和相机之间的转换矩阵 。棋盘格在标定的时候,会固定在机器人的末端,而机器人的末端坐标系(end)到基座坐标系(base)可以通过机器人正向运动学计算得到。那么我们可以通过如下关系测量出来棋盘格点在机器人基座坐标系的坐标 :
 和
和  分别代表机器人末端坐标系(end)到基座坐标系(base)的转换矩阵和棋盘格坐标系(board)到机器人末端坐标系(end)的转换矩阵。其中 可以实时根据机器人正运动学得到,而 可以通过设计一个固定尺寸的棋盘格得到。当棋盘格尺寸以及安装固定后,我们可以设棋盘格的左上角点为原点,然后测量或者根据设计尺寸得到棋盘格原点到机器人末端坐标原点的平移坐标。另外棋盘格平面一般与机器人末端平面平行,这样该原点的法向量也知道了,接下来便可以计算得到 。
分别代表机器人末端坐标系(end)到基座坐标系(base)的转换矩阵和棋盘格坐标系(board)到机器人末端坐标系(end)的转换矩阵。其中 可以实时根据机器人正运动学得到,而 可以通过设计一个固定尺寸的棋盘格得到。当棋盘格尺寸以及安装固定后,我们可以设棋盘格的左上角点为原点,然后测量或者根据设计尺寸得到棋盘格原点到机器人末端坐标原点的平移坐标。另外棋盘格平面一般与机器人末端平面平行,这样该原点的法向量也知道了,接下来便可以计算得到 。  代表棋盘格角点在棋盘格坐标系下的坐标,这个同样根据设计棋盘格的尺寸得到。另外我们需要注意棋盘格的角点在机器人坐标系和在图像坐标系的顺序需要一一对应,但是一般的方形棋盘格会有旋转对称的问题,即我们无法区分出来棋盘格的原点是左上角点还是右下角点,因此手眼标定时我们也可以用下面的非对称棋盘格。
代表棋盘格角点在棋盘格坐标系下的坐标,这个同样根据设计棋盘格的尺寸得到。另外我们需要注意棋盘格的角点在机器人坐标系和在图像坐标系的顺序需要一一对应,但是一般的方形棋盘格会有旋转对称的问题,即我们无法区分出来棋盘格的原点是左上角点还是右下角点,因此手眼标定时我们也可以用下面的非对称棋盘格。 ,然后根据图像识别加相机内参和深度信息得到棋盘格在相机坐标系中的坐标 ,我们便可以根据节1所述的方法计算得到相机到机器人的转换矩阵:
,然后根据图像识别加相机内参和深度信息得到棋盘格在相机坐标系中的坐标 ,我们便可以根据节1所述的方法计算得到相机到机器人的转换矩阵: ,转换为棋盘格在相机坐标系中的坐标 。
,转换为棋盘格在相机坐标系中的坐标 。
 为目标点的深度值,3D相机能够测出来目标点的深度,从而能够计算出目标点的3维坐标。列数
为目标点的深度值,3D相机能够测出来目标点的深度,从而能够计算出目标点的3维坐标。列数  和行数
和行数  为目标点在图像中的坐标。
为目标点在图像中的坐标。  代表目标点在相机坐标系下的三维坐标。
代表目标点在相机坐标系下的三维坐标。  和
和  为焦距,用于描述像素单位和三维坐标单位之间的比例关系。
为焦距,用于描述像素单位和三维坐标单位之间的比例关系。 和
和  为相机光心在图像中的投影位置,用于计算图像原点和相机坐标系原点之间的位移。。相机内参一般相机提供方会给出,有的相机提供方还会直接提供计算好的三维点云信息。如果相机提供方只给出了一个深度图,也没有给相机内参,则需要我们通过张正友标定法,标定出来相机的内参。opencv,python,matlab等提供了完善的内参标定工具包,可以直接使用。
为相机光心在图像中的投影位置,用于计算图像原点和相机坐标系原点之间的位移。。相机内参一般相机提供方会给出,有的相机提供方还会直接提供计算好的三维点云信息。如果相机提供方只给出了一个深度图,也没有给相机内参,则需要我们通过张正友标定法,标定出来相机的内参。opencv,python,matlab等提供了完善的内参标定工具包,可以直接使用。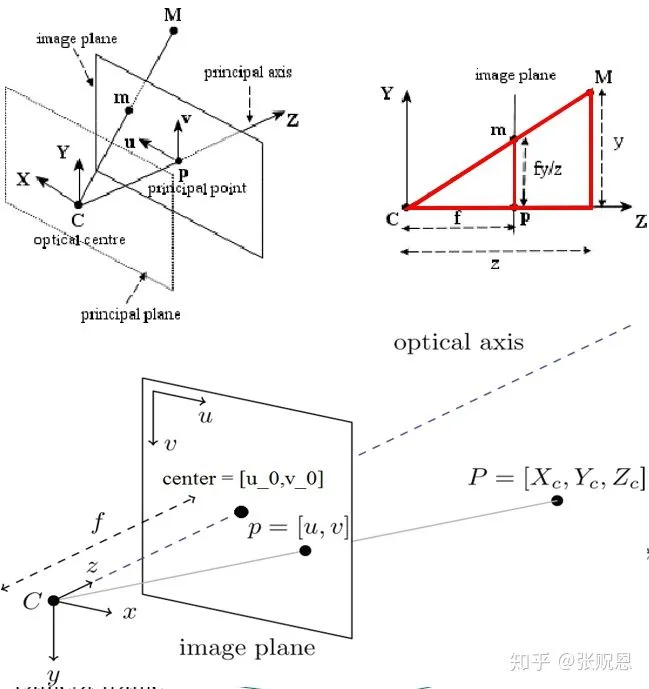 ,因此2D相机一般用于一个平面的物体识别。这样我们只需要估计出一个平面的 坐标,然后便可以根据式[6] 计算得到目标点在相机坐标系下的三维坐标 。
,因此2D相机一般用于一个平面的物体识别。这样我们只需要估计出一个平面的 坐标,然后便可以根据式[6] 计算得到目标点在相机坐标系下的三维坐标 。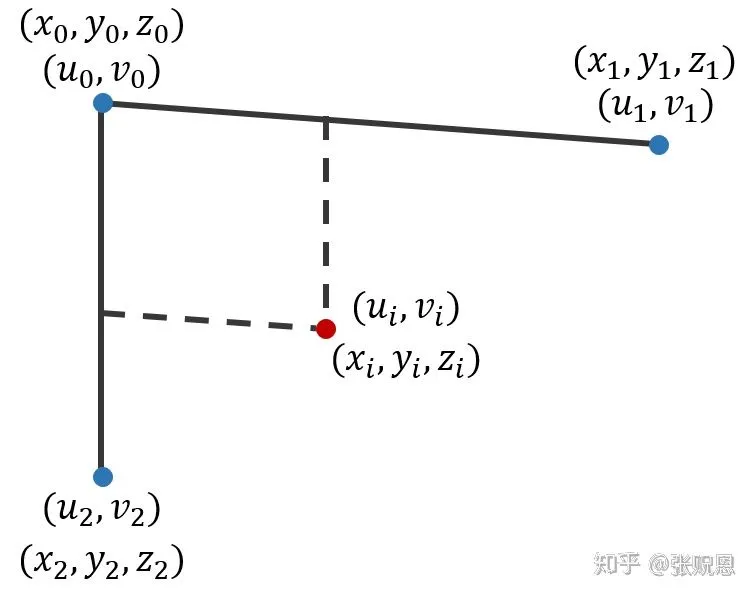
 ,
,  ,
,  。然后我们可以构建平行四边形,用两个坐标轴的向量去计算目标点在图像坐标系的坐标
。然后我们可以构建平行四边形,用两个坐标轴的向量去计算目标点在图像坐标系的坐标  。注意这里的坐标轴不需要是直角坐标轴,从而更加符合实际情况,因为实际贴标志物时不可能做到两条坐标轴完全垂直。
。注意这里的坐标轴不需要是直角坐标轴,从而更加符合实际情况,因为实际贴标志物时不可能做到两条坐标轴完全垂直。


 ,
,  ,
,  ,这三个点应该在一个平面上。因为式[9]计算出来的是一个比例关系,因此根据相似三角形的原理,我们可以计算出目标点点在机器人基座坐标系base的坐标
,这三个点应该在一个平面上。因为式[9]计算出来的是一个比例关系,因此根据相似三角形的原理,我们可以计算出目标点点在机器人基座坐标系base的坐标  :
: 转换为在机器人基座坐标系的三维坐标 。这个方法需要目标平面与相机平面平行,但是不需要知道目标点的深度值,也不需要参考点为直角坐标系。
转换为在机器人基座坐标系的三维坐标 。这个方法需要目标平面与相机平面平行,但是不需要知道目标点的深度值,也不需要参考点为直角坐标系。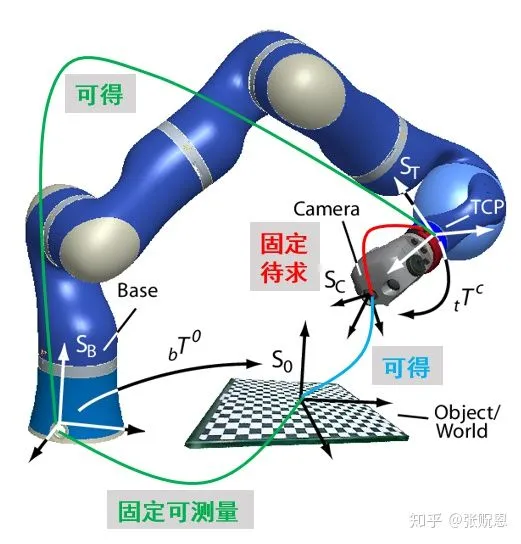
 。而根据Fig 6图中的各个坐标系的关系,我们可以列出来如下的坐标变换方程:
。而根据Fig 6图中的各个坐标系的关系,我们可以列出来如下的坐标变换方程: 代表固定在某个位置的棋盘格的点到机器人基座坐标系的坐标。这个坐标的计算有两种途径:(i)在机械臂末端装上探针,直接由末端去触碰棋盘格点,根据机器人正向运动学得到的末端到基座坐标系的转换矩阵 加上棋盘格角点到末端坐标系的坐标
代表固定在某个位置的棋盘格的点到机器人基座坐标系的坐标。这个坐标的计算有两种途径:(i)在机械臂末端装上探针,直接由末端去触碰棋盘格点,根据机器人正向运动学得到的末端到基座坐标系的转换矩阵 加上棋盘格角点到末端坐标系的坐标  ,我们可以得到固定的棋盘格角点在机器人基座坐标系的坐标 。(ii)接下来我们在末端装上camera,因为3D相机可以直接测量出棋盘格角点以及对应的3D坐标 ,所以我们加上机器人末端到基座坐标系的转换矩阵 和相机坐标系到机器人末端坐标系的转换矩阵 便可以求出来棋盘格在机器人基座坐标系的坐标 。不过很不幸,相机坐标系到机器人末端坐标系的转换矩阵 是我们的待求量,我们还不知道,因此我们需要对式[11]进行下简单的变换:
,我们可以得到固定的棋盘格角点在机器人基座坐标系的坐标 。(ii)接下来我们在末端装上camera,因为3D相机可以直接测量出棋盘格角点以及对应的3D坐标 ,所以我们加上机器人末端到基座坐标系的转换矩阵 和相机坐标系到机器人末端坐标系的转换矩阵 便可以求出来棋盘格在机器人基座坐标系的坐标 。不过很不幸,相机坐标系到机器人末端坐标系的转换矩阵 是我们的待求量,我们还不知道,因此我们需要对式[11]进行下简单的变换: 。 在机器人坐标系中的坐标可以由两种途径获得,一种是直接通过机器人末端触碰的方式得到测量值
。 在机器人坐标系中的坐标可以由两种途径获得,一种是直接通过机器人末端触碰的方式得到测量值  ,另外一种是通过相机识别加标定出来的转换矩阵得到预测值
,另外一种是通过相机识别加标定出来的转换矩阵得到预测值  。通过测量几组不同位置的目标点,我们可以比较测量值 和预测值 的距离误差。通过计算各个点的误差的均值和标准差,最终我们可以计算得出标定结果的系统误差(均值)和随机误差(标准差)。
。通过测量几组不同位置的目标点,我们可以比较测量值 和预测值 的距离误差。通过计算各个点的误差的均值和标准差,最终我们可以计算得出标定结果的系统误差(均值)和随机误差(标准差)。
申明:感谢原创作者的辛勤付出。本号转载的文章均会在文中注明,若遇到版权问题请联系我们处理。

----与智者为伍 为创新赋能----

联系邮箱:uestcwxd@126.com
QQ:493826566


