点击蓝字 关注我们
工业电机驱动器是当今全球工业的支柱,其能耗约占所有工业应用能耗的近三分之二。
相关法规越来越严格,市场对大幅降低工业电机驱动器能耗的需求变得愈加迫切。交流电机通常可直接由交流电源驱动。然而,为了提高能效和加强控制,通常需要采用变频驱动。
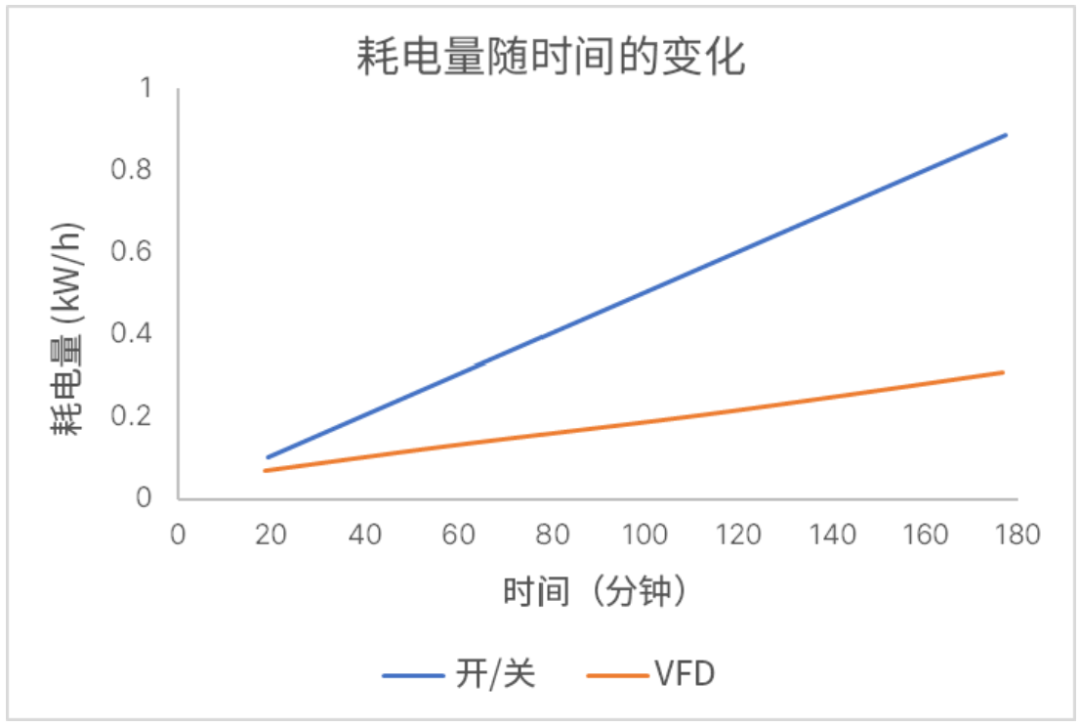
相较于传统的节流控制, 采用变频驱动 (VFD) 的工业驱动系统能效更高。安森美 (onsemi)提供各种各样的 VFD 产品,包括 MOSFET、 IGBT、 二极管、 功率集成模块 (PIM) 和智能功率模块 (IPM)。
子系统中使用的其他器件和技术包括:栅极驱动器、运算放大器、 位置传感器、 温度传感器, 以及其他用于控制和感知的器件。
借助现代半导体和新型电机架构,电机驱动器的能效和寿命可得到提升。
工业驱动器应用于众多工业领域,包括过程自动化、 风扇控制、 液体和气体泵、 机器人、 物料搬运、 机床、 石油和天然气工业等。

👉二氧化碳减排潜能
电机用途广泛, 从小家电到重型设备都有应用。多个信息来源表明,全球大约一半的电力被电机驱动器消耗。工业应用消耗的电力占到世界总发电量的近三分之一。工业领域自动化程度加速提高,工业电机系统的数量预计仍将持续增加。如今,可持续发展和能效逐渐成为热门话题。因此,更新现有方案和新部署的系统以尽可能提高能效至关重要。
预计 2024 年至 2029 年, 工业电机驱动器市场将以 5% 至 5.5% 的平均复合增长率 (CAGR) 增长,市场规模将从 255 亿美元扩大到 327 亿美元。发展中经济体的快速工业化是推动此增长的一大关键动力。目前, 市场对优化流程和提升能效的需求日益迫切。与燃气涡轮机等其他方案相比,电力驱动器往往能效更高,维护需求更少。
《2020 年电机系统市场评估》 (MSMA) 报告显示,美国的电机驱动系统蕴藏着巨大的节能减排潜力,每年可节省超过50 亿美元成本,并减少 4300 多万吨的二氧化碳排放。控制器和电机是需要改进的重点。
变频驱动有助于改善电机控制器, 显著提高电机在变化负载下的能效。以往, 许多系统的额定功率过大。这种做法虽然延长了系统的使用寿命,但同时也降低了系统的整体能效。通过实现负载匹配和变频驱动,系统的能效可以提升 10% 以上。
前述的 2020 年 MSMA 报告指出,采用更高能效的电机,例如永磁同步电机, 可以让美国每年节省 45,000 GWh 的电力。宽禁带 (WBG) 半导体虽然初始投资更高,但可进一步提高系统的能效。此类半导体的其他优势包括工作温度更高、工作电压更高和开关频率更高,有助于减小无源器件的尺寸并降低成本。
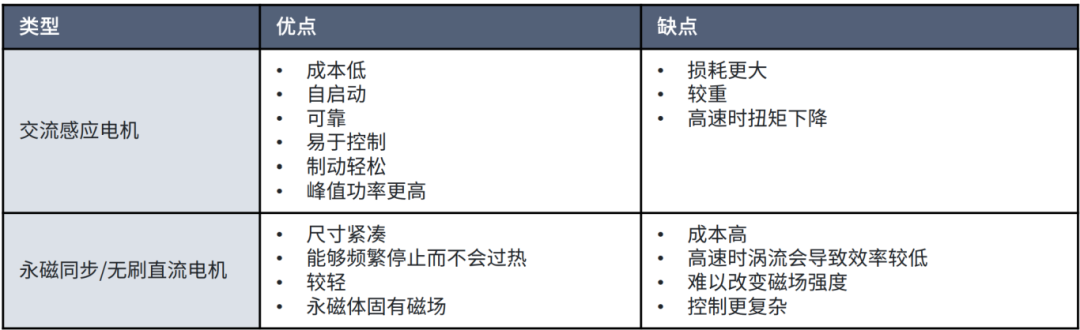
以前广泛使用的直流电机采用机械电刷在定子和转子之间换向,这种设计导致噪声高、 维护需求大、 能效低且散热性能差。相比之下,无刷电机采用电子换向, 因此能效更高、 更安静, 几乎不需要维护,使用寿命更长。然而, 无刷电机的控制更加复杂。交流电机主要有三种类型:交流感应电机 (ACIM)、 永磁同步电机 (PMSM) 和无刷直流 (BLDC) 电机。
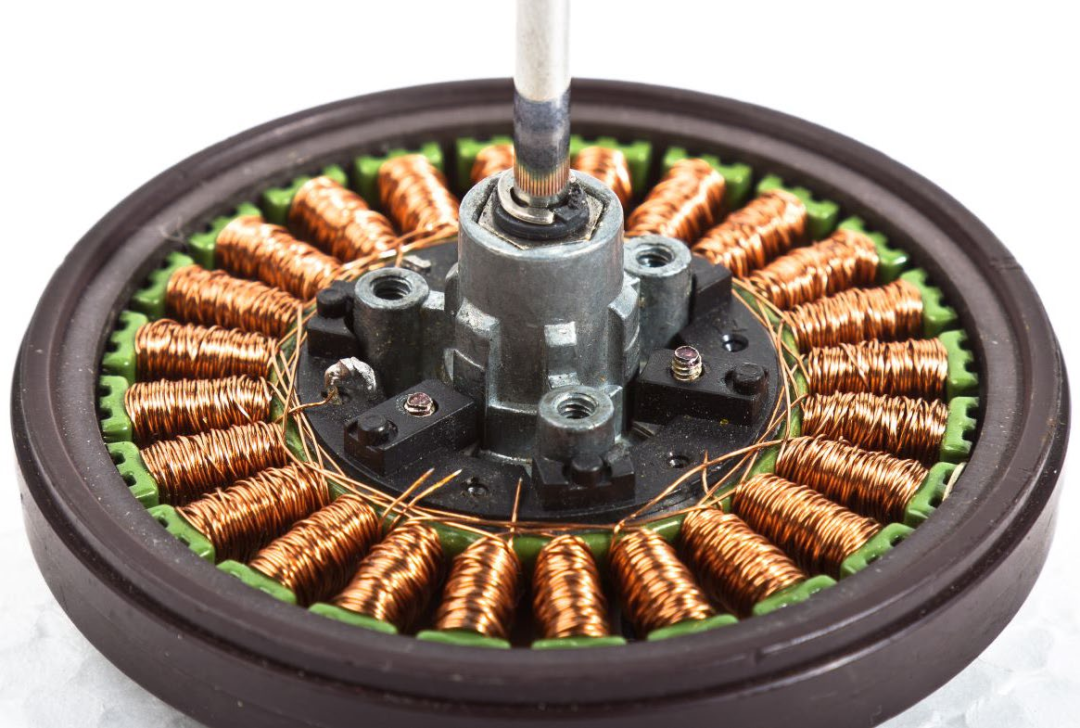
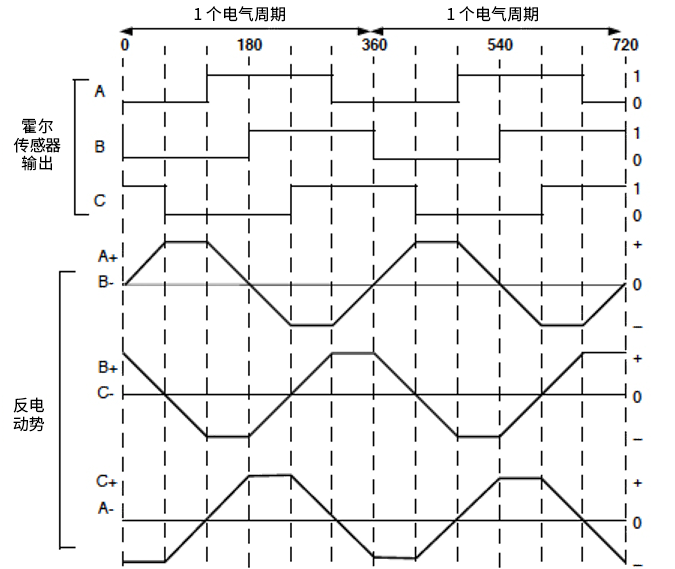
永磁同步电机 (PMSM) 和无刷直流 (BLDC) 电机所采用的定子与 ACIM 相同, 但转子中包含永磁体。这种设计不需要感应电流,因此能效更高 在这类电机中,转子速度等于定子电磁场的速度,也就是同步运行。PMSM 和 BLDC 的区别在于控制方式和反电动势 (BEMF) 响应。BLDC 的 BEMF 响应是梯形的, 而 PMSM 的响应是正弦的。
ACIM 和 PMSM/BLDC 非常适合连续运行且需要精确的速度和扭矩控制的场景, 通常用于传送带、物料搬运系统、 泵和压缩机等重型应用。因包含永磁体, 这些电机的成本较高。
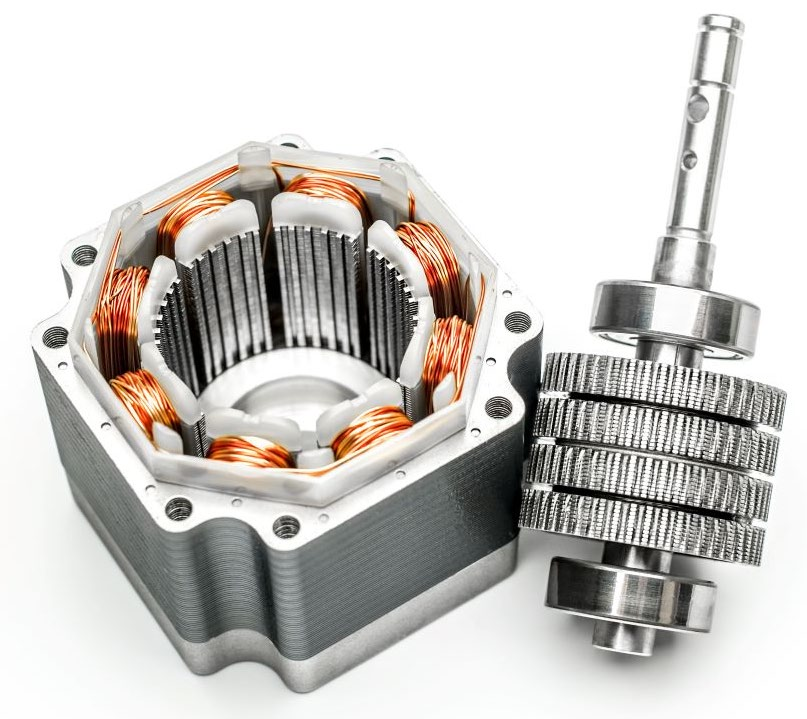
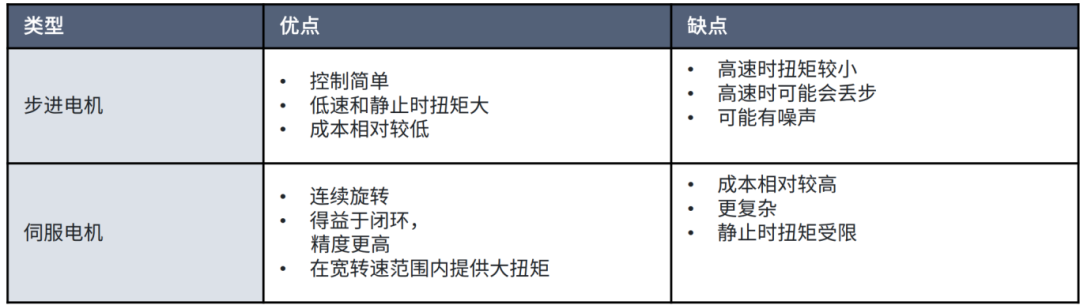
步进电机和伺服系统用于精确定位和受控运动场景,广泛用于驱动机械臂、 装配线、 升降辅助设备和其他需要保持和定位的类似应用。此类系统的特点是高准确性和良好的可重复性。
步进电机的转子通常包含永磁体和多个小齿,而齿数决定了步数。定子也有小齿, 但数量少于转子。就分布方式而言,有些与转子上的小齿对齐,有些则反之。定子线圈分为两组独立线圈。通电后, 线圈产生的磁场使齿部对齐, 从而使转子精确地转动一步。通过反复给两组线圈通电, 无需任何反馈即可实现非常精确的运动, 这种方式称为开环控制。
步进电机驱动器可以是单极的,也可以是双极的。双极步进电机的电流在两个方向上流动, 并且需要全桥逆变器来驱动两组绕组中的每一组。相比之下, 单极步进电机只需要电流单向流动,控制更加简单。此类电机可通过简单的高侧或低侧开关进行控制, 成本效益更佳。
伺服电机在闭环控制系统内运行。系统采用编码器的反馈来比较电机的实际位置与所需值。闭环可保障准确控制位置。伺服电机系统主要由三部分组成:电机、 反馈装置和控制电路。电机产生机械动力,可以是有刷直流电机、BLDC 电机、 PMSM 电机或 ACIM 电机。反馈装置提供有关电机位置、 扭矩和速度的信息。控制电路负责比较所需位置与实际位置,并调整输出以纠正存在的任何差异。
👉电机控制技术
梯形控制算法又称六步控制法,是较简单的控制算法,通过让电流同时流过两相, 第三相悬空, 使得电机有六种离散状态。此方法可产生高扭矩, 但与其他更先进的算法相比, 噪声和振动较大。
在正弦控制中,施加于电机绕组的电流波形是正弦波形,这种方法可降低扭矩纹波。但需要精确同步和识别转子位置,因此实现起来更加复杂。
与正弦控制相比, 磁场定向控制 (FOC) 在高速下可提供更高能效, 在动态负载下的性能也比上述技术更优异。在整个换向过程中, FOC 让定子和转子保持九十度对齐来优化电机扭矩, 从而降低扭矩纹波, 让旋转过程更平稳、 更静音。
间隔分布。
未完待续,下期将主要介绍方案概述,帮助您全面了解工业电机驱动设计要点。
⭐点个星标,茫茫人海也能一眼看到我⭐