


本文为读者投稿,分享的是一个四川省电子设计竞赛一等奖作品。
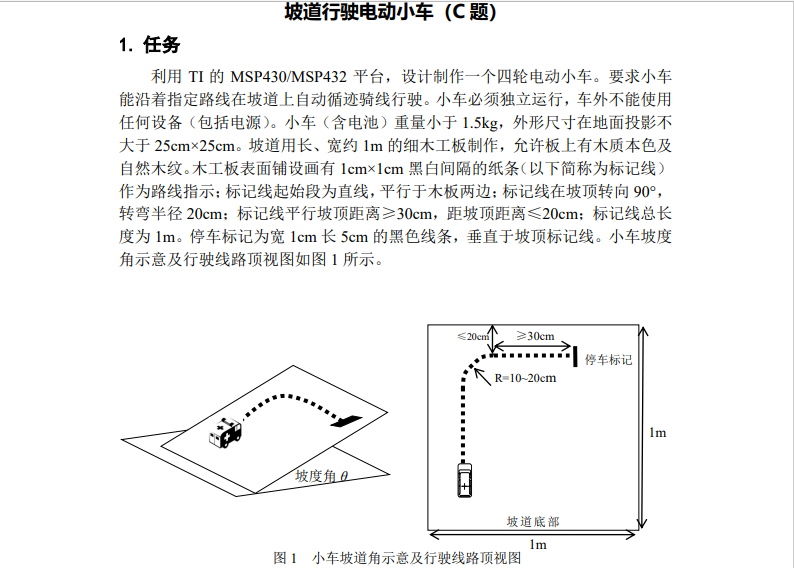
今年的四川省电子设计竞赛共有四道题目,基于我们对做车比较了解,所以选择了c题————坡道行驶电动小车,该题目要求如下:
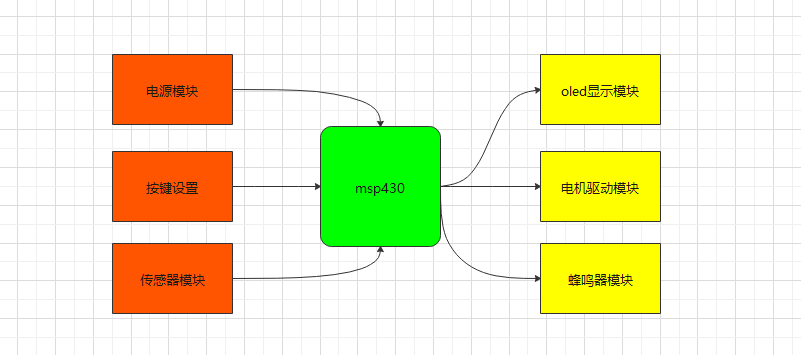
由于竞赛题目要求必须用msp430作为主控芯片,所以没办法,只能短时间来了解它,熟悉它。还好之前的师兄有430的开源库和例程,所以单片机的底层部分不用我们来担忧。
我们采用的是L298N电机驱动模块。L298N可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压,可以直接用单片机IO口提供信号;而且电路简单,使用比较方便。
由于是坡道小车,所以电机一定要选择大功率大力矩的电机,这样才能给小车足够的爬坡力,
由于题目要求我们必须循迹,所以我们采用四组光电传感器,检查赛道上黑线,调整路径,之所以加四组,就是为了防止赛道上黑点模块没有检测到,预防小车跑出路径,使其一直能够循迹跑完整个赛道。
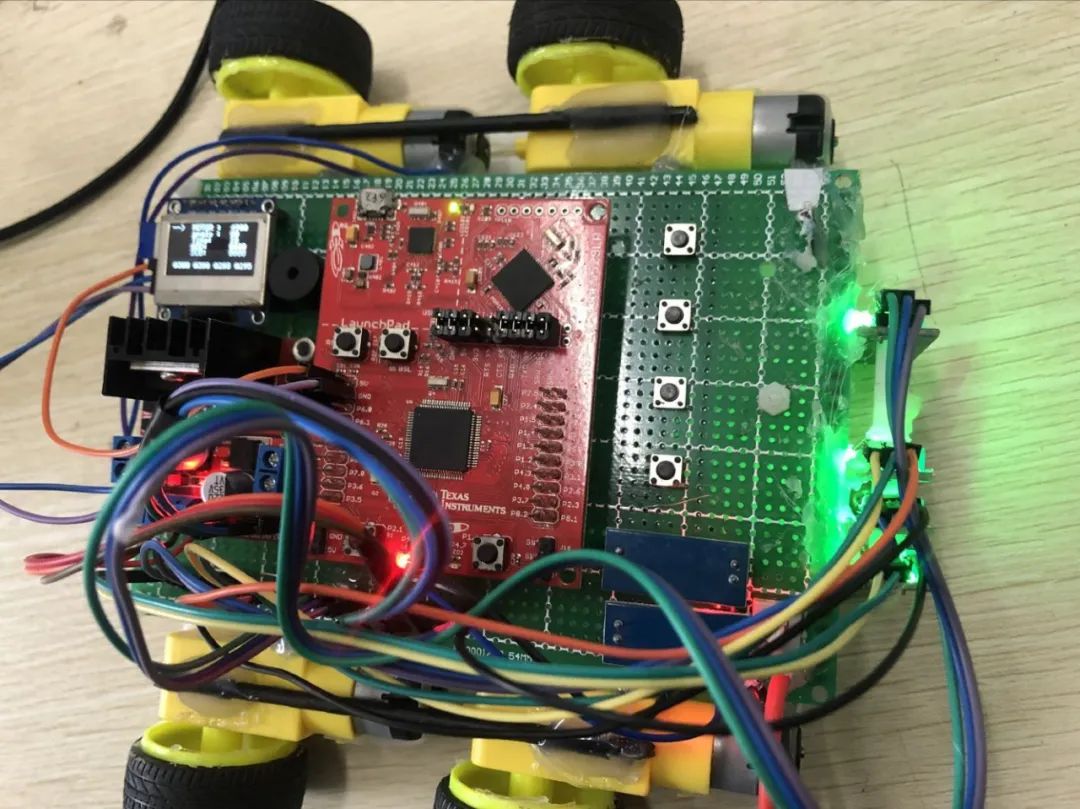
我们采用的是普通万能板,质量很轻,不会给车太大的压力,而且安装也方便。
在我看来,一个车的车轮及其车胎决定了这个车的极限,所以对于这两个东西一定要选好,这样车才能爬的更高,跑的更快。
对于此次比赛而言,我们采用3D打印塑料车轮,车胎则用硅胶胎,其质量轻,摩擦力大,后来发现硅胶胎也比较硬,容易打滑,就用了玩具小车的车胎,这样的摩擦力更好。
我们把四路光电传感器置于车头,无限接近于地面却又不会挨着地面以防其产生摩擦。这样就能更好的采值。
由于我安装的四路电机,放弃了舵机转向方案,而且整个路线是固定的,所以我们取巧,初始时便直接使右边电机的PWM大于左边的电机,这样造成一个差速,它会缓慢的往左偏移。
而在赛道上,由于有黑点的存在,一旦我传感器采到值,那么便会降低右电机的PWM,增加左电机的PWM,使其短暂的往右偏移,之后再次回到之前的差速状态。
也就是说我整个控制电路的系统,车身在不停的缓慢的往左偏,只有传感器采到值之后,小车才会回转一点,这便是我们的取巧方式。(我右边设有三个传感器,再加上我初始右移时速度很缓慢,所以不存在传感器采不到黑点的值。)
最后,但当两个传感器同时检测到黑线时,便停车,蜂鸣器也会叫。如此这般,就能实现整个赛道的循迹。
但当前面的设计都完成了,那么加上坡度之后,只需要改变电机的PWM,不停的记录数据就行。我们总共有四个按键,模式键,加减键,发车键。
我们将每个角度坡道不同时间所需的PWM写入数组,最后再显示在液晶上,通过按键改变角度及时间,那么初始便会有不同的PWM,这样比赛时就不会慌乱。
void ccd_collect(void)
{
unsigned int i = 0;
P6OUT|=CLK; //拉高
P3OUT&=~SI; //拉低
P6OUT&=~CLK; //拉低
P3OUT|=SI; //拉高
P6OUT|=CLK; //拉高
P3OUT&=~SI; //拉低
for(i=0;i<128;i++)
{
//delay1();
P6OUT&=~CLK; //拉低
//delay1();
ccd_data[i] = ADC_getdata(4)>>4;
P6OUT|=CLK; //拉高
}
tsl1401_finish_flag = 1;
}
void motor_control(void)
{
if((MOTOR<(2600+angle*250)) && (start_flag==0))
{
delay_time=Stime;
delay_time=delay_time+(200-MOTOR/50);
while((delay_time > Stime))
{
TA0CCR1 = 3000+angle*250;
TA0CCR2=0;
TA0CCR3 = 3000+angle*250;
TA0CCR4=0;
}
start_flag=1;
}
if(ADC_getdata(1)>1500) ADC_1 = 1;
else ADC_1 = 0;
if(ADC_getdata(2)>1500) ADC_2 = 1;
else ADC_2 = 0;
if(ADC_getdata(3)>1500) ADC_3 = 1;
else ADC_3 = 0;
if(ADC_getdata(4)>1500) ADC_4 = 1;
else ADC_4 = 0;
if(stop_flag == 0)
{
if(ADC_1 && ADC_2)
{
delay_time=Stime;
if((125-MOTOR/50) <25) delay_time+=25;
else delay_time=delay_time+(125-MOTOR/50);
OLED_Print_Num04(90,4,Stime);
while((delay_time > Stime))
{
OLED_Print_Num04(30,4,Stime);
OLED_Print_Num04(60,4,delay_time/2);
TA0CCR1 = MOTOR;
TA0CCR2=0;
TA0CCR3 = MOTOR;
TA0CCR4=0;
}
TA0CCR1=0;
TA0CCR2=0;
TA0CCR3=0;
TA0CCR4=0;
OLED_Print_Num04(90,6,Stime/200);
SPEAK_ON;
Dly_ms(100);
SPEAK_OFF;
stop_flag = 1;
}
}
if(stop_flag == 0)
{
if(ADC_2 || ADC_3 || ADC_4)
{
//右转
if(MOTOR<(2650+angle*250))
{
TA0CCR1 =6000+angle*250;
TA0CCR2=0;
TA0CCR3 = 0;
TA0CCR4=3000-angle*250;
turn_flag_R = 1;
}
else
{
TA0CCR1 = (AN_K1/2)*3;
TA0CCR2=0;
TA0CCR3 = 0;
TA0CCR4=MOTOR/2;
}
}
else
{
if(turn_flag_R)
{
delay_time=Stime+10;
while((delay_time > Stime))
{
if(angle>=5) TA0CCR1 = 4000+angle*250;
else TA0CCR1 = 3500+angle*250;
TA0CCR2=0;
if(angle>=5) TA0CCR3 = 4000+angle*250;
else TA0CCR3 = 3500+angle*250;
TA0CCR4=0;
}
turn_flag_R = 0;
}
else
{
TA0CCR1 = MOTOR;
TA0CCR2=0;
TA0CCR3 = MOTOR;
TA0CCR4=0;
}
}
}
}
以上就是本次的分享,如果觉得文章不错,转发、在看,也是我们继续更新的动力。
猜你喜欢:
省电子设计竞赛一等奖作品分享(一)
省电子设计竞赛一等奖作品分享(二)
省电子设计竞赛一等奖作品分享(三)
2020年精选原创笔记汇总
干货 | 结构体、联合体嵌套使用的一些实用操作
工具 | 手把手教你在VSCode中使用Git
1024G 嵌入式资源大放送!包括但不限于C/C++、单片机、Linux等。在公众号聊天界面回复1024,即可免费获取!

