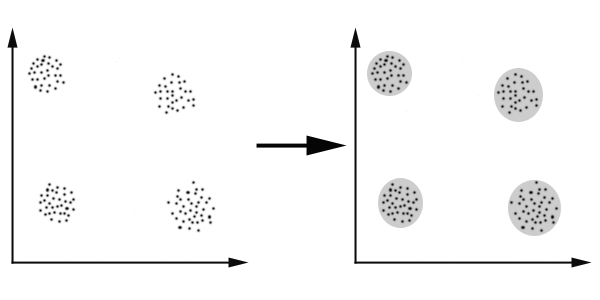
 K-means算法原理
K-means算法原理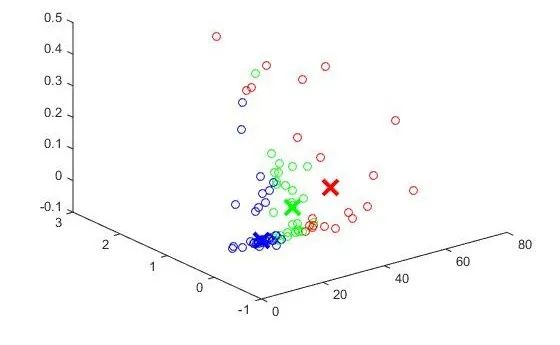
 and
and .
.


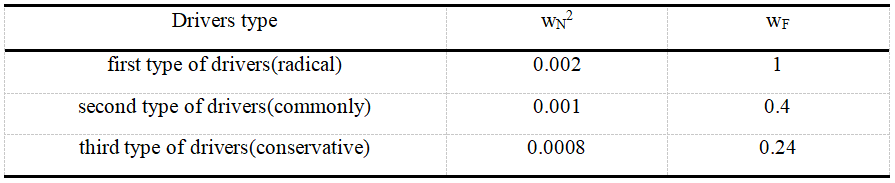
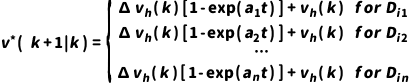
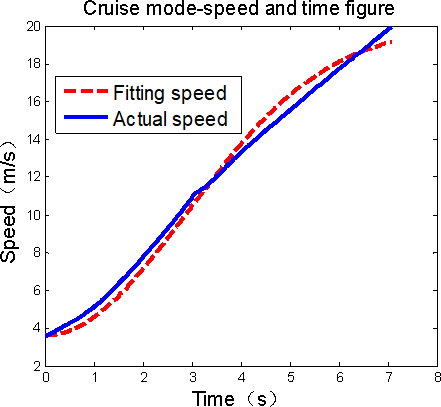
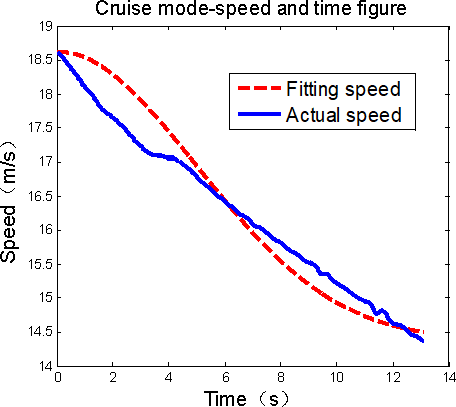
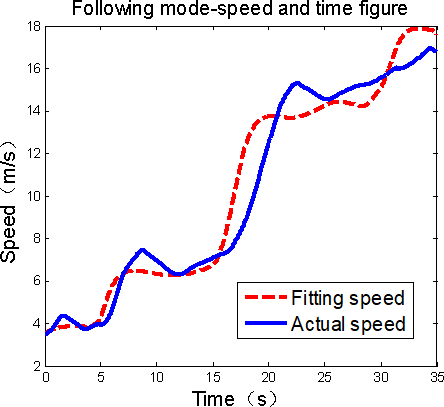
 通过计算’k’时刻的速度表示下一个’(k+1)’时刻的预期速度。
通过计算’k’时刻的速度表示下一个’(k+1)’时刻的预期速度。 表示驾驶员设置的巡航速度,
表示驾驶员设置的巡航速度, 表示速度差阈值,
表示速度差阈值, 表示当前巡航速度与后车辆速度之间的速度差,,
表示当前巡航速度与后车辆速度之间的速度差,, 是当前“k”采样时间的后车辆速度,速度的变化过程由参数a决定。
是当前“k”采样时间的后车辆速度,速度的变化过程由参数a决定。
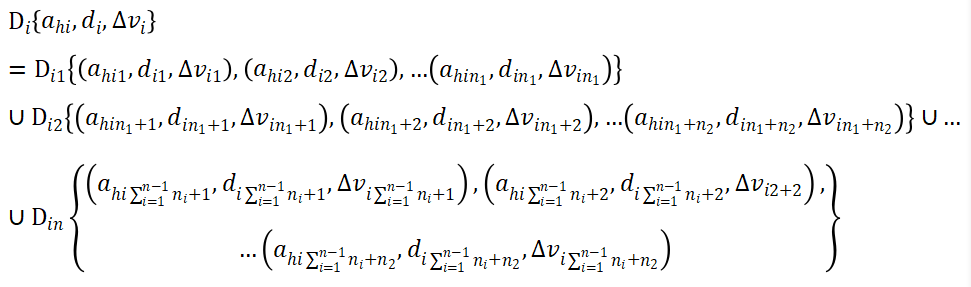
 (i=1,2,3)被划分为n个子集,k个子集的子集数为
(i=1,2,3)被划分为n个子集,k个子集的子集数为 :
:
 的
的 ,基于带遗忘因子的最小二乘算法的参数
,基于带遗忘因子的最小二乘算法的参数 的估计方差为:
的估计方差为:


 和
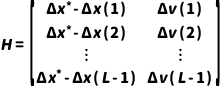
和 是迭代中的过程矩阵,
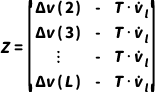
是迭代中的过程矩阵, 是输出,,
是输出,, 是可观测数据矩阵。观测长度为L,采样周期为T。因此:
是可观测数据矩阵。观测长度为L,采样周期为T。因此:

 。
。 

 .。
.。

 。
。

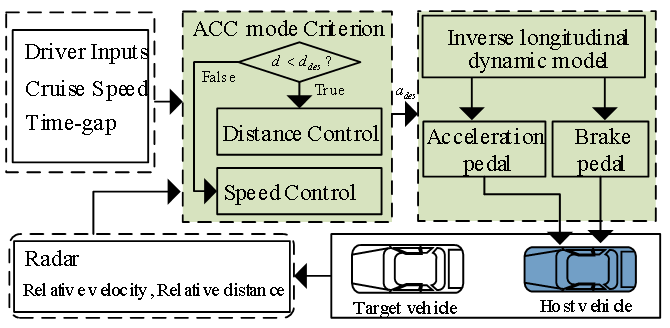
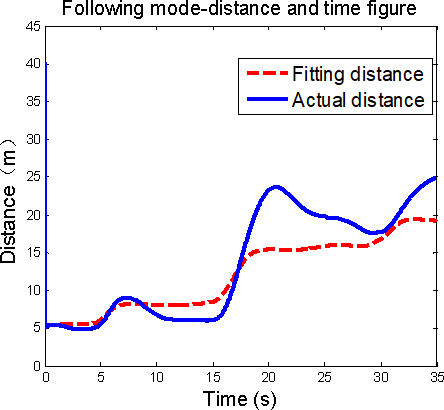
 表示最小跟车距离,
表示最小跟车距离, 表示后车速度。
表示后车速度。






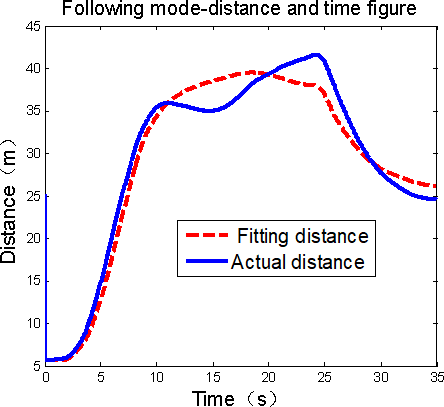
 ,相对车辆距离为
,相对车辆距离为 ,预期车辆距离为
,预期车辆距离为 ;观察步长为L。
;观察步长为L。





 .。
.。
 。
。
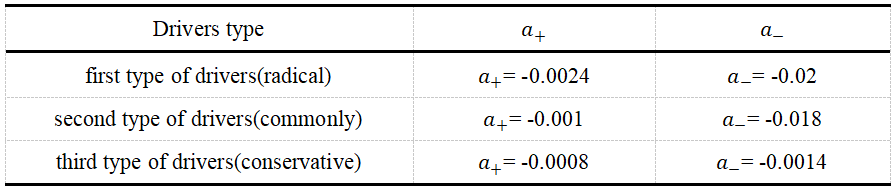
 最小,
最小, 最小。conservative的最大,最大;
最小。conservative的最大,最大;