点击上方蓝字谈思实验室
获取更多汽车网络安全资讯

智能驾驶系统包括以下几个部分:感知、融合、定位与地图、决策与控制。其中,决策与控制是车辆行驶性能的关键,决策模块根据感知、融合的数据,实时规划出一条目标路径、车速以及加速度等 [1];车辆控制模块,根据实时的目标路径计算出方向盘目标转角。
文献 [2][3] 设计了横向轨迹 PID 闭环控制,该算法能够在中低速工况下稳定跟踪目标路径,但在高速工况下目标轨迹跟踪容易引起车辆超调与姿态发散。文献 [4][5] 设计了基于模型预测的轨迹跟踪控制方法,该算法通过寻优算法,设定约束条件,寻求最优的目标轨迹,能够实现部分的优化控制。
但在实车实验中发现,针对横向控制问题难以设计出适当的目标优化函数、合理的约束条件以及较小的计算量,使得算法在实车上难以获得较好的性能。
本文结合车辆运动学采用前馈控制计算目标转角,以及结合道路状态的反馈路径偏差闭环修正实现车辆的实时闭环控制。该控制算法可扩展性好,适应性强,能够应用于各种场景下的控制,通过实车试验验证了该算法的通用性、可靠性。
01
轨迹跟踪横向控制框架
轨迹跟踪控制是衔接智驾系统与原车控制系统的关键要素,其中智驾系统根据感知环境、地图等信息计算出实时的局部路径与车速等信息,而 VCU 会在收到上层发送的轨迹后,根据车辆的特性合理地控制方向盘转角、油门、制动、档位等。其中,方向盘转角是车辆行驶控制的难点。
首先,需要将底层被动的电动助力转向更改为主动电动转向,并且对转向的响应速度、转角精度均具有很高的要求。其次,根据目标路径计算目标转角,让车辆能够平顺地安全行驶。
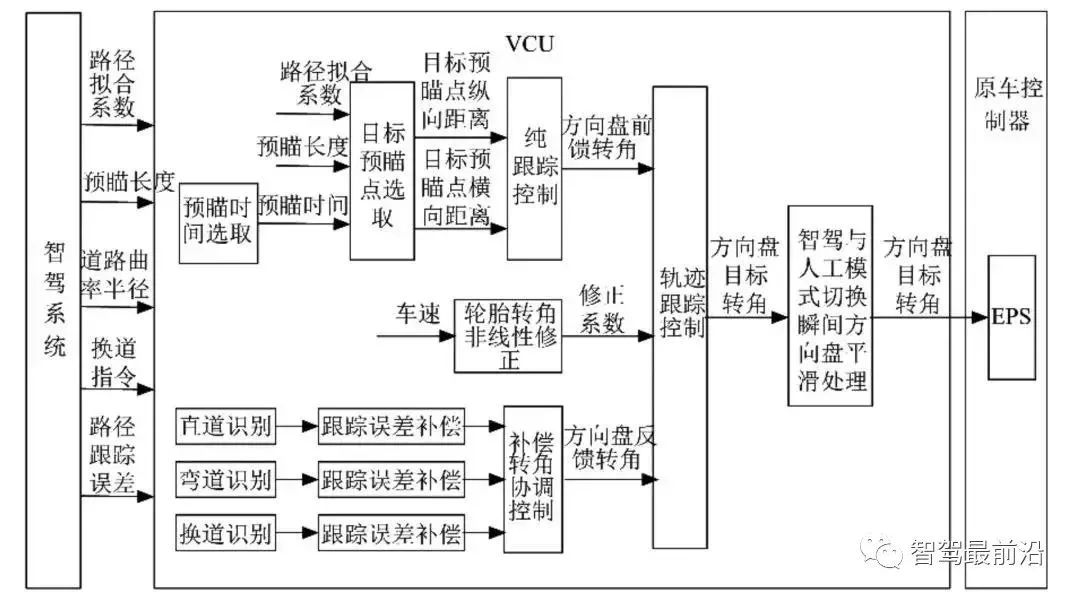
图 1 轨迹跟踪转向控制系统框架
图 1 中包括基于运动学的预瞄前馈控制、横向误差反馈闭环控制、转向不足特性修正、人机模式切换时方向盘平滑处理。其中,人机模式切换时,方向盘平滑处理主要解决进入智能驾驶瞬间方向盘突然转动而可能出现打手的现象,为此对切换瞬间时方向盘转角转动进行平滑处理,使得车辆行驶稳定性更好。
下面将详细介绍其他各模块。
决策与控制信号通讯
决策是根据感知、地图、定位等规划出实时的局部目标路径,该路径以车辆后轴中心为规划原点,通过车辆预瞄全局路径某一点,分别计算出按照运动学关系每 1 m 车辆的未来运动点位置,通过预瞄获得车辆原点至目标全局路径贴近的短距离局部路径若干点 [6]。通过将若干点拟合出三阶方程,并将 X、Y 的三阶拟合系数发送给 VCU 进行解码控制。

式中:a1、b1、c1、d1、a2、b2、c2、d2 为三阶方程的拟合系数;η 为预瞄长度占局部轨迹规划长度的百分比。
道路曲率半径是根据车辆行驶的道路,在全局道路上每 1 m 取 1 个点,3 个点两两之间计算转弯半径,然后可以计算一段距离内的道路最小转弯半径。VCU 可以根据道路最小转弯半径得到未来道路的情况选择对应的控制方法,解决高速弯道上离心力的控制问题。
路径跟踪误差是根据车辆当前的横向位置与全局路径的横向位置偏差,若车辆与全局路径有偏差,规划的路径会将车辆引导至全局路径。但考虑到方向盘的静态偏差角度、外界侧向风或离心力等因素,会导致车辆实际位置与目标轨迹会有一定的偏距,使得车辆并不是行驶在车道中心。为此,输出该误差值用于反馈的补偿控制,能够解决相关问题。
换道指令是指车辆决策算法规划出换道的路径,但在弯道上车辆向内道并线时,按照直道上的换道控制方法,车辆难以实现正常向内线并线。为此 VCU 在接收到换道指令后,按照正常的换道控制方法,若在设定时间内未完成换道,意味着离心力阻止了车辆换道成功。为此,进入换道补偿控制,逐渐增大方向盘转角,实现成功换道。
转向前馈控制
驾驶员驾驶车辆时,在低速预瞄距离很近,而随着车速越来越高,需要驾驶员预瞄的距离也越远 [7][8]。为此,提出预瞄时间与车速的乘积为预瞄距离。

式中:Lmax 为预瞄长度;t 为预瞄时间;η 为路径拟合的系数,范围在 [0,1],其中 0 代表车辆后轴中心位置原点,而 1 代表规划目标路径的终点。通过 X、Y 可以计算出目标路径点相对车辆后轴中心的位置。
根据运动学计算几何关系,计算得到两轮模型的前轮转向角 θ = arctan [2 × W × B/(X^2 + Y^2)]。
经过实车测试发现车辆左右换道的时间不一致,左换道时间约比右换道时间少 2 s。考虑到决策与控制算法的左右换道对称性,分析该处的问题原因在于机械转向系统。根据试验获取的方向盘与左右车轮的转角关系,并不是绝对对称的关系,更不能采用固定传动比控制方向盘转角。
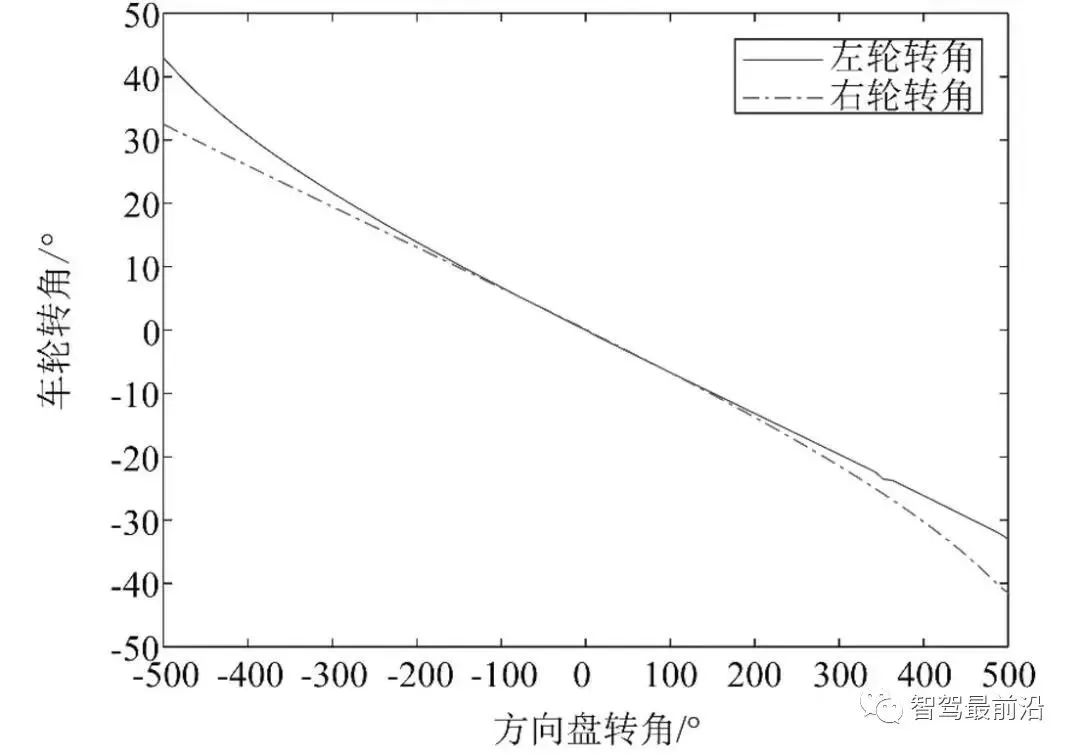
图 2 方向盘转角与左右车轮的转角曲线
为此分别计算左右车轮的期望转角为:
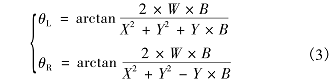
式中:W 为车辆轴距;B 为车辆的左右轮轮距。
方向盘转角为:

式中:G 为车轮转角插值 Map 获得方向盘对应转角。
在实车试验时,发现生成的目标路径左右晃动。使得车辆即便在走直线,方向盘也会来回摆动。为此采用方向盘转角死区处理,防止方向盘转角的不稳定晃动。
在试验时发现在不同车速下过直角弯时性能差距较大,经过分析发现,在不同车速下,车辆的转向特性不一致,因为轮胎随车速表现出不同转向的特性,在低速时转向不足,中高速时中性转向,为此在不同车速下进行非线性特性转角补偿。

转角反馈闭环控制
相同的车型与相同的程序,进行长时间的试验时,发现个别车辆在行驶时会始终存在稳定的跟踪误差。经过分析发现,方向盘零位会随着车辆行驶时的机械零件松动而出现零漂,大约在[-5°,5°]。但在人工驾驶时,驾驶员是一个高度智能的决策与控制系统,能够适应方向盘的轻度零漂。而智能驾驶汽车对方向盘的转角闭环控制精度与响应速度要求较高,而零漂问题会影响车辆在高速下的控制稳定性。
在直道测试时,无侧风,发现个别车辆始终存在稳定的跟踪误差。经分析,方向盘的静态转角偏差会导致车辆跟踪有偏差,而侧向风也会一定程度地影响车辆直线行驶。如何抵消这些外因与内因,保证车辆在直道的直线行驶,本文提出分别采用识别直道、弯道、换道 3 种工况,进行对应反馈补偿的控制方法。
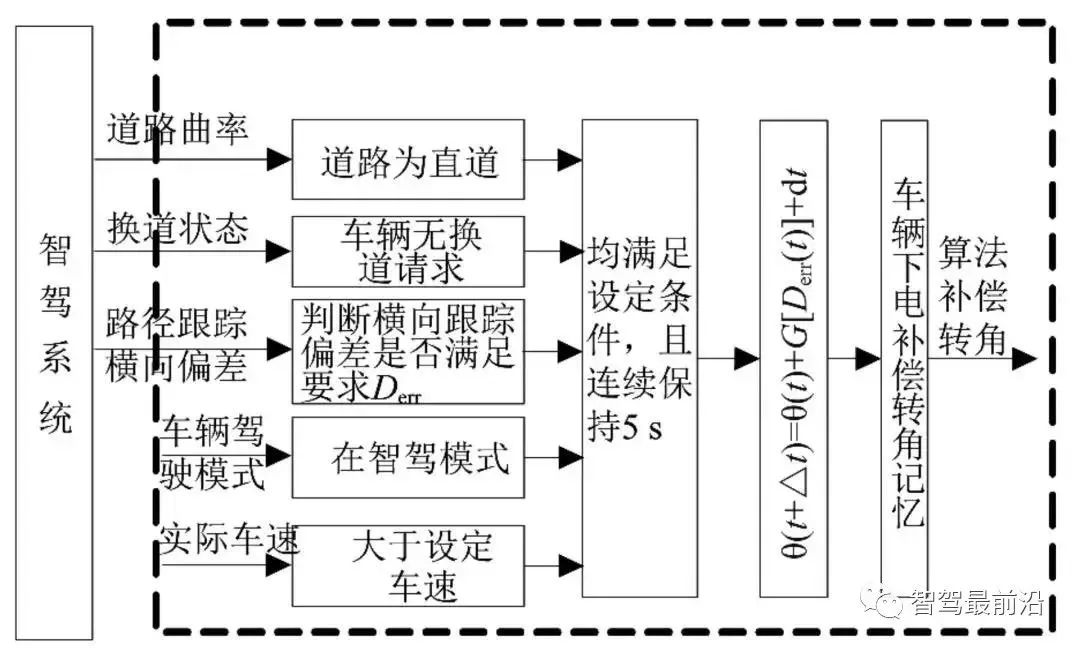
图 3 直道路径跟踪偏差转角补偿控制
图 3 为识别道路为直道时,若出现一个方向的横向跟踪误差并且无法减小,说明前馈控制算法无法消除该系统的偏差,为此会在几秒时间后通过慢慢修正方向盘转角来逐渐减小固定的横向偏差。同时需要设定一个合理的安全带,以避免车辆出现周期性的超调。经过大量的试验验证,该算法适应不同的方向盘静态误差和外界侧向风进行高速无人驾驶。
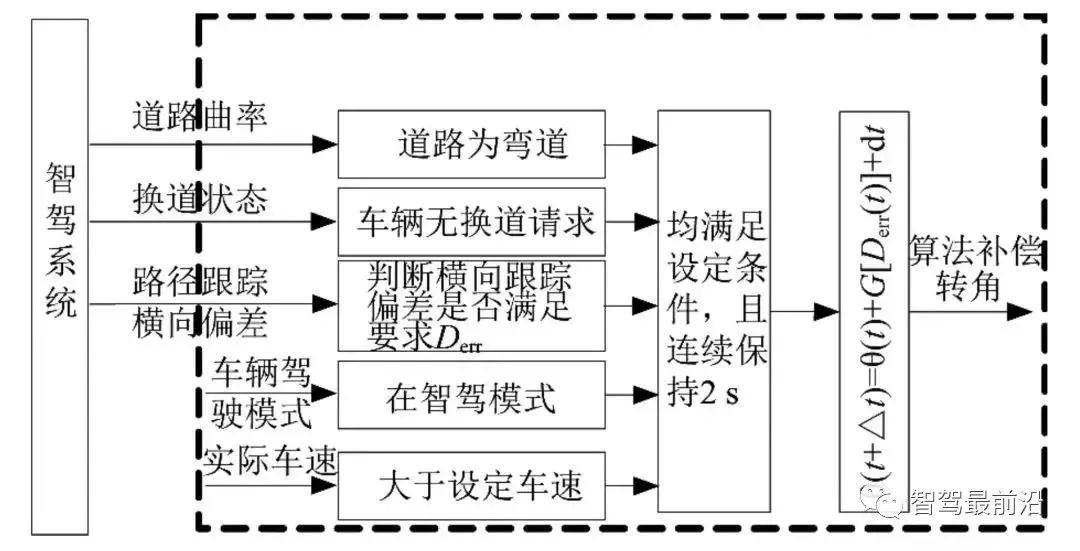
图 4 弯道路径跟踪偏差转角补偿控制
直道路径跟踪补偿主要解决方向盘偏差或者侧向风等,同时考虑到为防止车辆转向的超调,降低其响应速度。但在弯道上,若车速较高,车辆离心力较大,难以保持在车道内。为此,针对弯道上的横向跟踪误差需要进行针对性处理,图 4 提出根据道路的曲率半径,判断是否处于弯道以及车辆跟踪的横向误差值过大,否则激活弯道的转角补偿控制,维持车辆在本车道内。经过实车试验后,发现车辆高速行驶在弯道内依然能够稳定地行驶在车道中心。
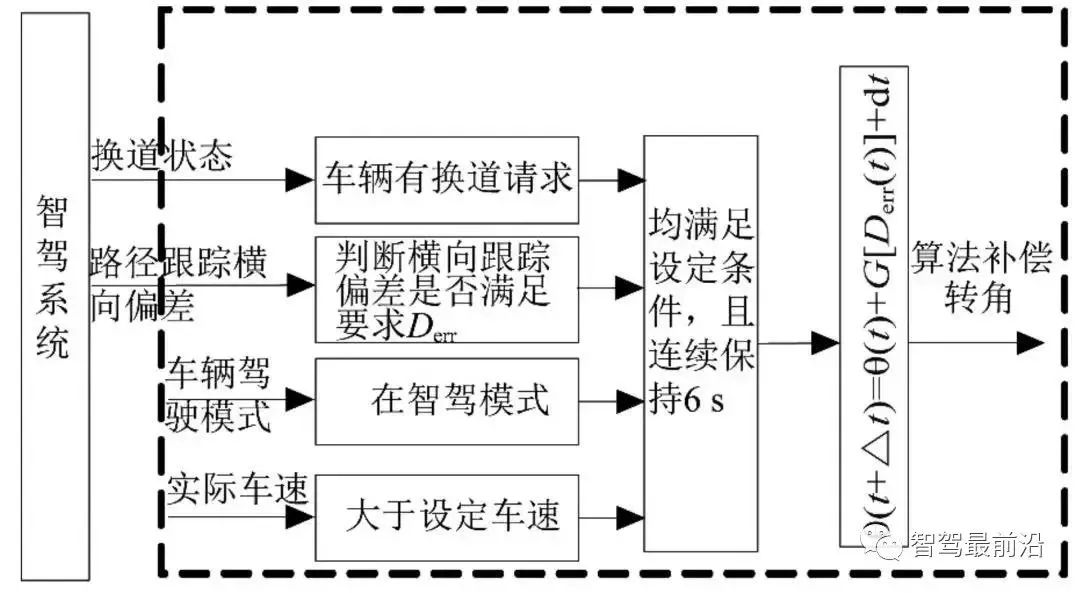
图 5 换道路径跟踪偏差转角补偿控制
在实车试验时发现,车辆在弯道高速行驶时,向内车道换道行驶,由于车辆离心力的作用,容易出现车辆行驶在两车道之间,无法成功并入内车道。为此,图 5 提出在识别出换道状态后,且车辆始终无法完成换道,方向盘转角进行主动补偿,直至车辆完成换道。经过试验验证,该算法能够实现在高速急弯道上,车辆安全地向内道换道成功。
02
车辆控制性能评价
本文研究对象为某款汽车车型,通过改造底盘系统:电动助力主动转向功能、发动机控制模块的扭矩控制功能、稳定系统主动制动的控制功能、车身稳定控制系统、网关等,选择测试场地为高环试车场,车辆测试场景为直道车道保持、弯道车道保持、换道等。
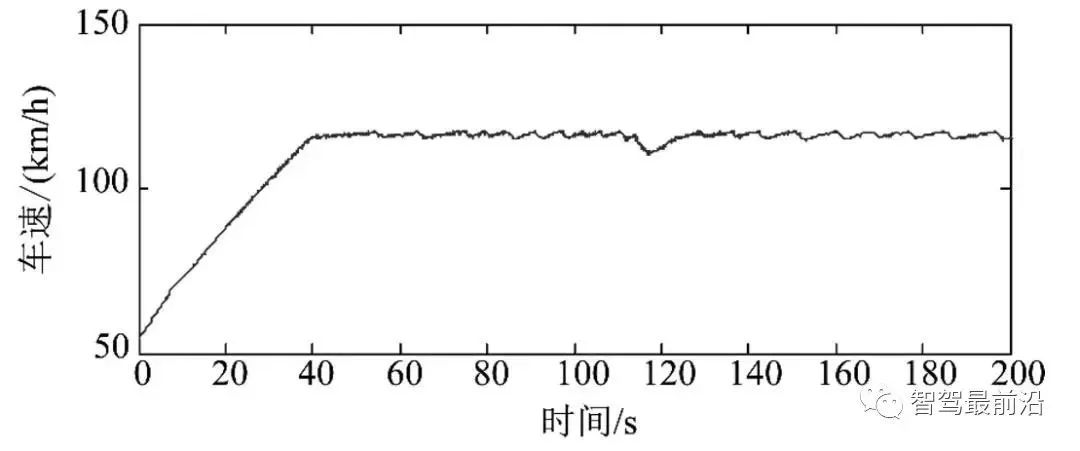
图 6 车速
图 6 为车速曲线图,车辆在 55 km/h 加速至120 km /h,并维持在 120 km/h 约 180 s。
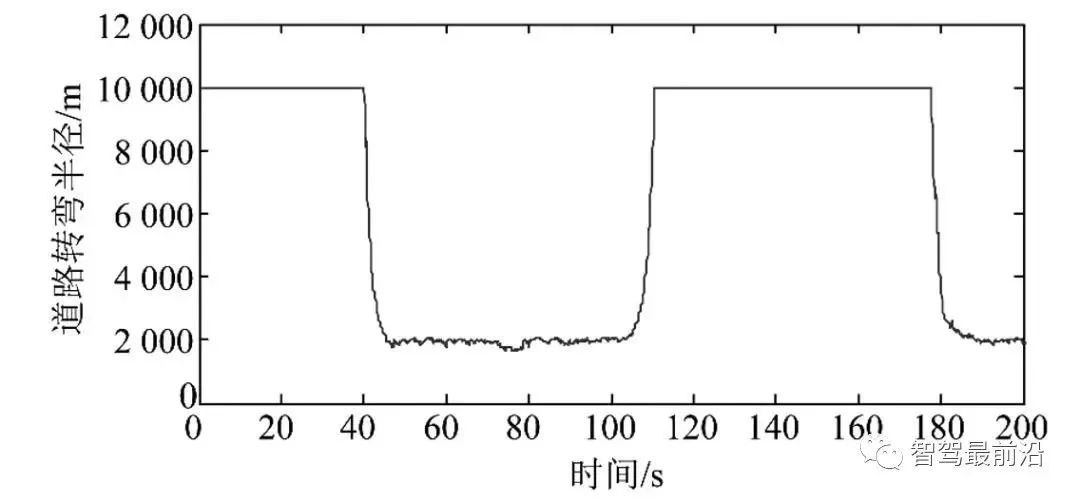
图 7 车辆道路曲率半径
根据道路曲率半径,每隔 1 m 取一个点,每 3 个相邻的坐标点即可计算出 1 个道路半径值,如图 7 所示。
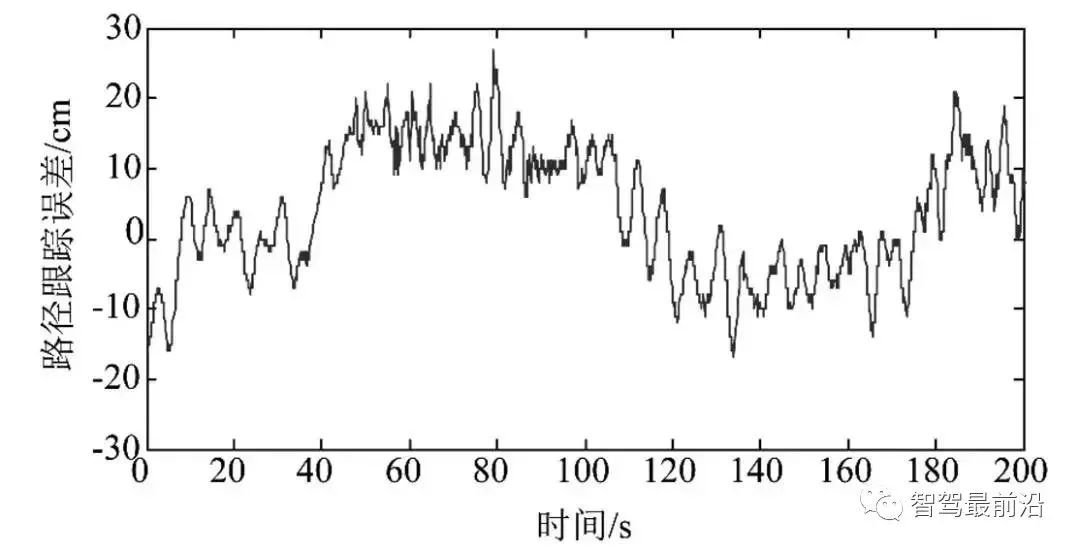
图 8 路径跟踪误差
图 8 为路径跟踪误差,其最大值小于 20 cm,平均误差在 10 cm 以内,当车辆误差较大时,转角补偿控制、横向误差也能快速地收敛,让车辆维持在车道中心。
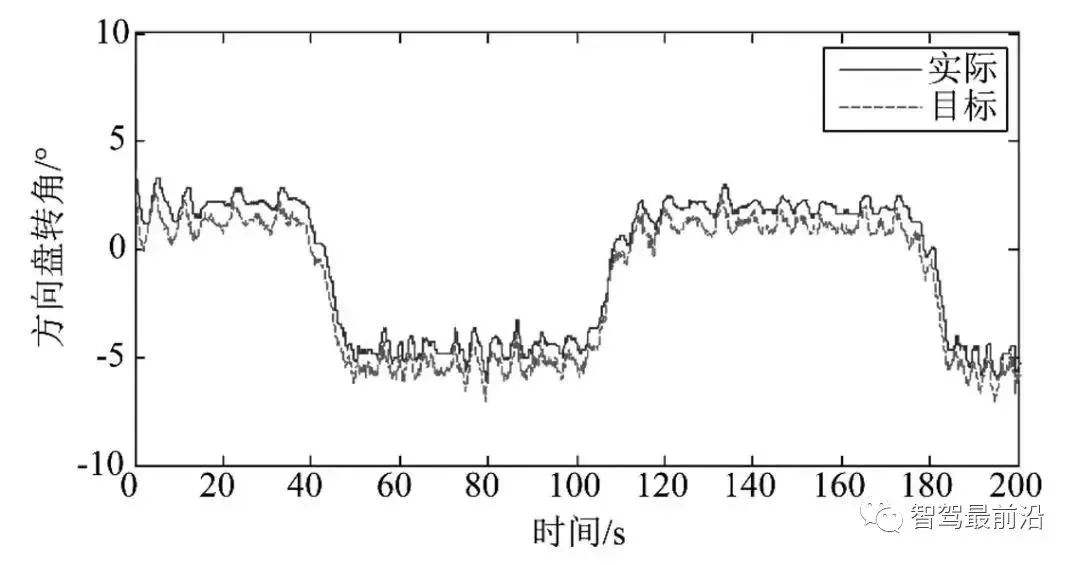
图 9 方向盘实际与目标转角
图 9 为方向盘的实际转角与期望转角,期望转角根据轨迹跟踪控制计算,但根据图 9 可知,方向盘的目标转角与实际转角贴合较好,转角较平稳。
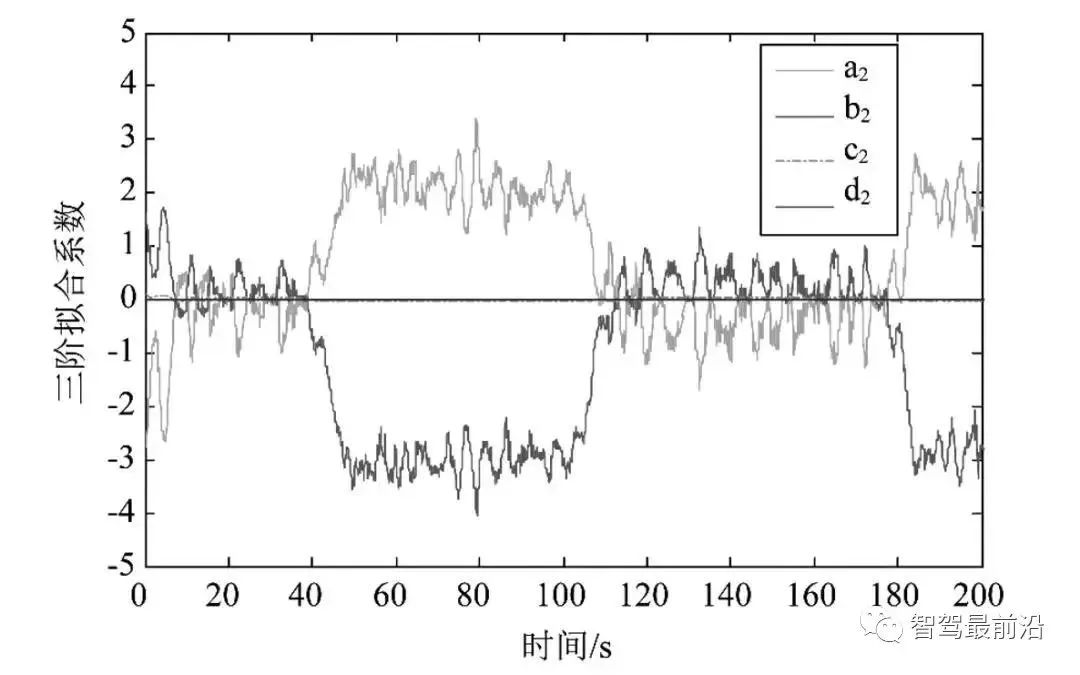
图 10 目标轨迹 Y 方程的 4 个系数
图 10 为目标轨迹 Y 方程的 4 个系数,因为拟合系数的坐标原点为后轴中心,为此,常数项 d2 为 0,一次项系数 c2 较小,二次项与三次项 b2、a2 较大。
智能驾驶车辆控制是动态环境下安全行驶的关键,本文提出一种前馈控制计算目标转角,以及结合道路状态的反馈路径偏差闭环修正车辆闭环控制。
该方法使车辆在多种工况下均能紧跟目标路径,解决了因车辆方向盘转角误差、外界侧向风及弯道下车辆高速离心力等多种因素导致的车辆横向偏差。
经过实车试验验证,该算法具有很强的鲁棒性与扩展性,能够实现复杂工况下的车辆稳定性能。
参考文献
[1] 姜岩,赵熙俊,龚建伟,等. 简单城市环境下地面无人驾驶系统的设计研究[J]. 机械工程学报,2012,48 (20):103-112
[2] 丁海涛,郭孔辉,李飞,等. 基于加速度反馈的任意道路和车速跟随控制驾驶员模型[J]. 机械工程学报,2010,46(10):116-120
[3] 庄德军,喻凡,林逸. 基于分数阶 PD 控制器的车辆方向控制[J]. 上海交通大学学报,2007(2):278-283
[4] 孙银健. 基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D]. 北京:北京理工大学,2015
[5] 杨建森,郭孔辉,丁海涛,等. 基于模型预测控制的汽车底盘集成控制[J]. 吉林大学学报(工学版),2011(2):1-5
[6] Guo Konghui,Ding Haitao,Zhang Jianwei,et al. Development of a longitudinal and lateral driver model for autonomous vehicle control [J]. International Journal of Vehicle Design,2004,36(1):50-65
[7] Falcone P,Borrelli F,Asgari J,et al. Predictive active steering control for autonomous vehicle systems [J] . Control Systems Technology on IEEE Transactions,2007,15(3):566-580
[8] Gao Zhenhai,Guanh sin,Guo Konghui. Driver directional control model and the application in the research of intelligent vehicle [J]. China Journal of Highway and Transport,2000,13(3)
end
精品活动推荐



专业社群
部分入群专家来自:
新势力车企:
特斯拉、合众新能源-哪吒、理想、极氪、小米、宾理汽车、极越、零跑汽车、阿维塔汽车、智己汽车、小鹏、岚图汽车、蔚来汽车、吉祥汽车、赛力斯......
外资传统主流车企代表:
大众中国、大众酷翼、奥迪汽车、宝马、福特、戴姆勒-奔驰、通用、保时捷、沃尔沃、现代汽车、日产汽车、捷豹路虎、斯堪尼亚......
内资传统主流车企:
吉利汽车、上汽乘用车、长城汽车、上汽大众、长安汽车、北京汽车、东风汽车、广汽、比亚迪、一汽集团、一汽解放、东风商用、上汽商用......
全球领先一级供应商:
博世、大陆集团、联合汽车电子、安波福、采埃孚、科世达、舍弗勒、霍尼韦尔、大疆、日立、哈曼、华为、百度、联想、联发科、普瑞均胜、德赛西威、蜂巢转向、均联智行、武汉光庭、星纪魅族、中车集团、赢彻科技、潍柴集团、地平线、紫光同芯、字节跳动、......
二级供应商(500+以上):
Upstream、ETAS、Synopsys、NXP、TUV、上海软件中心、Deloitte、奇安信、为辰信安、云驰未来、信大捷安、信长城、泽鹿安全、纽创信安、复旦微电子、天融信、奇虎360、中汽中心、中国汽研、上海汽检、软安科技、浙江大学......
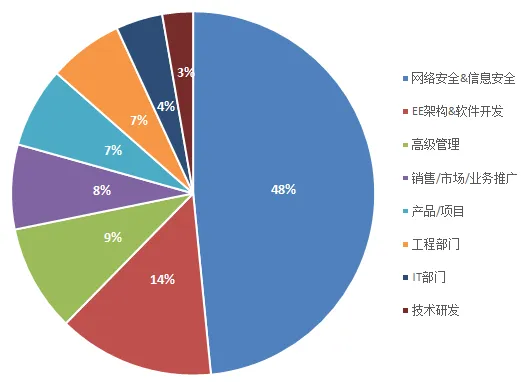
人员占比
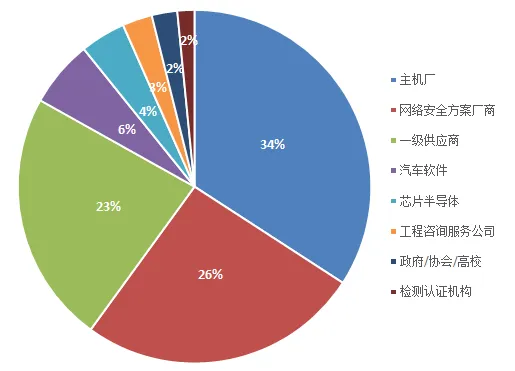
公司类型占比
更多文章
关于涉嫌仿冒AutoSec会议品牌的律师声明
一文带你了解智能汽车车载网络通信安全架构
网络安全:TARA方法、工具与案例
汽车数据安全合规重点分析
浅析汽车芯片信息安全之安全启动
域集中式架构的汽车车载通信安全方案探究
系统安全架构之车辆网络安全架构
车联网中的隐私保护问题
智能网联汽车网络安全技术研究
AUTOSAR 信息安全框架和关键技术分析
AUTOSAR 信息安全机制有哪些?
信息安全的底层机制
汽车网络安全
Autosar硬件安全模块HSM的使用
首发!小米雷军两会上就汽车数据安全问题建言:关于构建完善汽车数据安全管理体系的建议
